基于OFDR技术的多芯光纤三维形状传感系统的制作方法
基于ofdr技术的多芯光纤三维形状传感系统
技术领域
1.本公开涉及光纤传感技术领域,具体而言,涉及一种基于ofdr技术的多芯光纤三维形状传感系统。
背景技术:
2.光纤传感技术是指光在光纤中传输时,光的强度、波长、相位、频率等特性会随外界施加应力、温度的变化而发生改变;将光信号转化为电信号,使用特定算法对数字信号进行数据解调,就能获得外界的变化情况,起到传感器的作用。光频域反射(ofdr)分布式光纤传感技术是光纤传感技术的一种,该技术利用基于瑞利散射的光谱移动原理,采用距离域互相关算法进行数据解调,可用于水坝、桥梁、油井、管道、电器线路、航空航天、船舶结构等的安全监测,通过对反映健康状态的温度、应变、本征频率等的监测,可以实现对结构损伤的早期预警以及损坏部位的定位。然而,传统的ofdr系统测量的数据是一维应变,只能表征被测物体发生了拉伸形变抑或是压缩形变,而当应用对象为三维物体时无法判断其形变的方向,因而无法对三维物体在空间中的姿态进行重构。
技术实现要素:
3.本公开的目的在于提供一种基于ofdr技术的多芯光纤三维形状传感系统,在本公开提供的传感系统的基础上能够实时对三维物体在空间中的姿态进行重构。具体方案如下:
4.根据本公开的具体实施方式,第一方面,本公开提供一种基于ofdr技术的多芯光纤三维形状传感系统,包括:磁光开关、辅助干涉仪、三台主干涉仪、光纤扇出器、数据采集模块以及数据处理模块;
5.所述磁光开关包括端口a以及与所述端口a相对的端口b、端口c以及端口d,所述端口a连接扫频光,所述端口b、端口c以及端口d分别连接所述三台主干涉仪的输入端;所述磁光开关通过时分复用的方式连通所述端口a与所述端口b、所述端口a与所述端口c、所述端口a与所述端口d;
6.所述辅助干涉仪用于产生外部时钟信号,所述辅助干涉仪的一端连接所述扫频光,另一端将所述外部时钟信号输出至所述数据采集模块;
7.所述光纤扇出器用于将分别与所述三台主干涉仪连接的三根单芯光纤合成为一根多芯光纤;
8.所述数据采集模块用于在所述外部时钟信号下采集所述三个主干涉仪的拍频信号;以及
9.所述数据处理模块根据所述数据采集模块采集到的信号生成所述三根单芯光纤的应变信息。
10.可选地,所述磁光开关与所述数据处理模块连接,在所述数据处理模块的控制下连通或断开所述主干涉仪。
11.可选地,所述数据采集模块包括进一步包括:第一耦合器、偏振控制器、环形器、第二耦合器以及偏振分束器;
12.所述第一耦合器包括一个输入端和两个输出端,所述一个输入端与所述磁光开关连接,所述两个输出端分别与所述偏振控制器、所述环形器连接;所述第一耦合器用于对所述一个输入端输入的信号进行分路;
13.所述环形器用于将所述扫频光输出至待测光纤,以及输出所述待测光纤的瑞利散射光至所述第二耦合器;
14.所述第二耦合器包括两个输入端和一个输出端,所述两个输入端分别与所述偏振控制器、所述环形器连接,所述一个输出端与所述偏振分束器连接;所述第二耦合器用于将所述两个输入端的信号进行混频;
15.所述偏振分束器用于将经由所述第二耦合器混频的混频信号分成相互正交的p光和s光。
16.可选地,所述第一耦合器为1:99耦合器,所述第二耦合器为50:50耦合器。
17.可选地,所述数据采集模块进一步包括光电探测器,所述光电探测器用于将光信号转化为电信号,所述光电探测器包括一光敏表面,所述p光和s光在该光敏表面进行拍频干涉形成拍频干涉光信号,所述光电探测器将该拍频干涉光信号转化为电信号,并输出至所述数据采集卡。
18.可选地,所述数据处理模块通过可编程逻辑器件实现。
19.可选地,进一步包括可调谐激光器,所述可调谐激光器被配置为提供所述扫频光。
20.可选地,所述扫频光为中心波长为1550nm的线性扫频光。
21.可选地,进一步包括上位机,所述上位机接收所述数据处理模块计算出的所述三根单芯光纤的应变信息,并根据所述三根单芯光纤的应变信息进行解算,获得所述多芯光纤在三维空间中的完整形状。
22.可选地,所述上位机配置为根据所述三根单芯光纤的应变信息求解所述三根单芯光纤各点的特征分解曲率、确定所述各点处的弯曲方向。
23.本公开提供的多芯光纤三维形状传感系统通过三根纤芯的形变情况获取三个维度的应变信息,进而可以根据上述应变信息解算出整根光纤的形变方向,实现实时对三维物体在空间中的姿态进行重构。在本实施例提供的多芯光纤三维形状传感系统的基础上,可以实现在使用一根单模多芯光纤的情况下,实时重构出光纤在空间中的三维形状。
附图说明
24.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本公开的实施例,并与说明书一起用于解释本公开的原理。显而易见地,下面描述中的附图仅仅是本公开的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。在附图中:
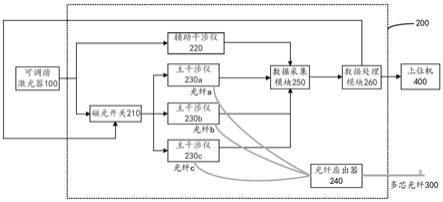
25.图1示意性地给出了本发明实施例提供的基于ofdr技术的多芯光纤三维形状传感系统结构框图;
26.图2示意性地给出了本发明实施例提供的三维形状传感系统中主干涉仪的结构框图;
27.图3示意性地给出了本发明实施例提供的三维形状传感系统涉及到的多芯光纤的截面示意图;
28.图4示意性地给出了本发明实施例提供的三维形状传感系统涉及的应变数据解算的流程图;
29.图5示意性地给出了本发明实施例提供的三维形状传感系统涉及的三维形状还原算法流程图。
30.附图标记表示为:
31.100、可调谐激光器;200、三维形状传感系统;210、磁光开关;220、辅助干涉仪;230a、主干涉仪;230b、主干涉仪;230c、主干涉仪;231、第一耦合器;232、偏振控制器;233、环形器;234、第二耦合器;235、偏振分束器;240、光纤扇出器;250、数据采集模块;251、光电探测器;252、数据采集卡;260、数据处理模块;300、多芯光纤;400、上位机。
具体实施方式
32.为了使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步地详细描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
33.在本发明实施例中使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本发明。在本发明实施例和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义,“多种”一般包含至少两种。
34.应当理解,本文中使用的术语“和/或”仅仅是一种描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。另外,本文中字符“/”,一般表示前后关联对象是一种“或”的关系。
35.应当理解,尽管在本发明实施例中可能采用术语第一、第二、第三等来描述,但不应限于这些术语。
36.还需要说明的是,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的商品或者装置不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种商品或者装置所固有的要素。在没有更多限制的情况下,由语句“包括一个”限定的要素,并不排除在包括所述要素的商品或者装置中还存在另外的相同要素。
37.下面结合附图详细说明本发明的可选实施例。
38.如图1所示,根据本发明的具体实施方式,本发明提供一种基于ofdr技术的多芯光纤三维形状传感系统200,包括:磁光开关210、辅助干涉仪220、三台主干涉仪230a~230c、光纤扇出器240、数据采集模块250以及数据处理模块260。
39.所述多芯光纤三维形状传感系统200在使用时通常需要连接一可调谐激光器100,该可调谐激光器100可以作为所述多芯光纤三维形状传感系统200的扫频光源,为该多芯光纤三维形状传感系统200提供线性扫频光。所述可调谐激光器100具有较高的扫频速度,其扫频速度可达2000nm/s。在一些实施例中,所述可调谐激光器100被配置为提供中心波长为1550nm的线性扫频光,扫描范围可以被配置为32nm。在一些实施例中,所述可调谐激光器
100包括在所述多芯光纤三维形状传感系统200之中。
40.所述多芯光纤三维形状传感系统200接入的扫频光被分为两路,其中,第一路扫频光进入辅助干涉仪220,用于产生数据采集模块250所需的外部时钟信号,第二路扫频光则经由磁光开关210时分复用地输入到三台主干涉仪230a~230c。
41.具体地,所述磁光开关210包括端口a以及与所述端口a相对的端口b、端口c、端口d,其中端口a与可调谐激光器100相连接,磁光开关210的端口b、端口c、端口d分别对应连接主干涉仪230a、主干涉仪230b、主干涉仪230c的输入端,所述磁光开关210可以通过时分复用的方式连通端口a与端口b、端口a与端口c、端口a与端口d,以使所述可调谐激光器100产生的扫频光依次且循环地输入到主干涉仪230a、主干涉仪230b、主干涉仪230c,实现扫频光的时分复用。采用时分复用的方式可以保证输入到任意一台主干涉仪的扫频光的光功率。
42.在一些实施例中,所述磁光开关210在所述数据处理模块260的控制下接通或断开某一台主干涉仪,具体地,所述磁光开关210与所述数据处理模块260连接,接收所述数据处理模块260输出的控制信号,该控制信号可以对所述磁光开关210进行逻辑控制,将可调谐激光器100提供的扫频光以时分复用的方式输入到三台主干涉仪230a~230c。
43.所述辅助干涉仪220用于产生外部时钟信号。所述可调谐激光器100发出的扫频光在辅助干涉仪220中发生拍频效应,产生携带有光源相位信息的扫频光,即外部时钟信号。所述辅助干涉仪220的一端接入所述可调谐激光器100输出的扫频光信号,另一端将产生的外部时钟信号输出至所述数据采集模块250。所述辅助干涉仪220可以选用马赫-曾德辅助干涉仪。在一些实施例中,所述辅助干涉仪220通过两个50:50的光纤耦合器和两段长度相差200米的单模光纤构成,具体地,可调谐激光器100输出的扫频光信号输入辅助干涉仪220后,被第一个光纤耦合器分为两路,由于两路光之间存在光程差,故会在第二个光纤耦合器处发生拍频干涉。
44.所述三台主干涉仪230a~230c的性能与参数基本相同,图2给出了图1的多芯光纤三维形状传感系统200其中一路主干涉仪的内部结构示意图。该主干涉仪进一步包括:第一耦合器231、偏振控制器232、环形器233、第二耦合器234以及偏振分束器235。
45.所述第一耦合器231用于将所述扫频光分为两路。所述第一耦合器231包括一个输入端和两个输出端,其中,所述输入端与所述磁光开关210连接,用于接收该磁光开关210导通后输出的扫频光,所述两个输出端分别与所述偏振控制器232、所述环形器233连接。可调谐激光器100发出的扫频光经由磁光开关210后接入所述第一耦合器231,并被该第一耦合器231分为两路,其中,第一路扫频光进入偏振控制器232作为参考壁,第二路扫频光进入环形器233和待测光纤中,作为信号壁。第一路扫频光与第二路扫频光的比值范围可以为1:99~10:90。在一些实施例中,第一耦合器231为1:99耦合器时,第一路扫频光为1%的扫频光,第二路扫频光为99%的扫频光。
46.所述环形器233用于将扫频光输出至待测光纤,同时输出所述待测光纤的瑞利散射光至所述第二耦合器234。所述环形器233包括三个接口,分别为接口一、接口二以及接口三,其中,接口一连接所述第一耦合器231,接入该第一耦合器231发出的第二路扫频光,接口二连接待测光纤,端口3连接所述第二耦合器234。
47.所述第二耦合器234用于将参考壁的扫频光与环形器233端口3输出的背向瑞利散射信号进行混频,并将该混频后的信号输出至所述偏振分束器235。所述第二耦合器234包
括两个输入端和一个输出端,其中,两个输入端分别与所述偏振控制器232、所述环形器233连接,所述输出端与所述偏振分束器235连接。在一些实施例中,所述第二耦合器233为50:50耦合器。
48.所述偏振分束器235用于将经由第二耦合器234混频的混频信号分成相互正交的p光和s光。所述偏振分束器235的输入端连接所述第二耦合器234的输出端,所述偏振分束器235生成的正交信号输出至所述光电探测器241的光敏表面。
49.所述光纤扇出器240用于将多根光纤合成为一根多芯光纤300,具体地,所述光纤扇出器240将与主干涉仪230a连接的光纤a、与主干涉仪230b连接的光纤b、与主干涉仪230c连接的光纤c合成为一根多芯光纤300。
50.在一些实施例中,所述多芯光纤300为单模三芯光纤,即在一根光纤中有三根纤芯。图3给出了一种可选的三芯光纤的纤芯分布,图中三根纤芯分别处于一个正三角形的三个顶点的位置。使用单模三芯光纤可以弥补了传统单模单芯光纤在三维应用场景下的数据采集量不足与无法分辨方向的问题。根据三根纤芯的空间分布关系能进一步解算出光纤在空间中的三维形状。
51.所述数据采集模块250用于将光信号转化为电信号并采集该电信号,所述数据采集模块250可以进一步包括光电探测器251和数据采集卡252。
52.所述光电探测器251用于将光信号转化为电信号,具体地,所述光电探测器251包括一光敏表面,所述偏振分束器235生成的相互正交的p光和s光在该光敏表面进行拍频干涉,形成拍频干涉光信号,光电探测器251将该拍频干涉光信号转化为电信号,并输出至所述数据采集卡252。
53.所述数据采集卡252用于采集经由光电探测器251生成的电信号。所述数据采集卡252的输入端与所述光电探测器251连接,所述数据采集卡252的输出端与数据处理模块260连接。所述数据采集卡252可以在所述辅助干涉仪220输出的外部时钟信号下采集三个主干涉仪230a~230c的拍频信号,所述数据采集卡252还可以同时消除由于光源非线性扫频带来的影响。
54.所述数据处理模块260接收所述数据采集卡252采集到的信号,并根据采集到的信号生成光纤的应变信息。所述数据处理模块260的一端与所述数据采集卡252连接,另一端与上位机400连接。
55.在一些实施例中,所述数据处理模块260可以利用可编程逻辑器件(field programmable gate array,fpga)实现。fpga可以实现对采集数据的高速处理,达到实时传感的效果。图4示意性地给出了应变数据的解算流程,参考数据与测试数据分别依次经过二维快速傅立叶变换(fft)、选取滑动窗、补零插值以及快速傅里叶逆变换(ifft)等运算,然后将经过上述运算的参考数据与测试数据进行互相关,获得应变传感结果。
56.具体地,所述数据采集卡252在辅助干涉仪220的外时钟下采集3个通道的参考数据存入存储器(例如本实施例中为静态随机存取存储器,sram)中,然后分别进行二维fft计算,将原始数据转化为沿光纤长度上散射和反射光强的分布,将频域结果保存到存储器(例如本实施例中为ddr4)中;然后对频域数据选取滑动窗,对滑动窗的数据进行补零插值、ifft计算,将其变换到时域,存到存储器(例如本实施例中为ddr4)中;后续每次传感会采集3个通道的测试数据,对测试数据进行同样的fft、补零插值、ifft计算后,将每个滑动窗内
的时域数据与参考数据进行互相关计算,得到3个通道的传感结果。
57.扫频光信号在本实施例提供的三维形状传感系统200内的主要处理流程可以归纳为:在信号壁中,扫频光由环形器234的端口1进入,输出到端口2连接的待测光纤中,背向瑞利散射信号从环形器234的端口3输出,在第二耦合器233中与参考壁的扫频光进行混频,混频信号在偏振分束器235中分成相互正交的p光和s光,并在光电探测器241的光敏表面进行拍频干涉。光电探测器251将拍频干涉光信号转化为电信号后,由数据采集卡252对信号进行采集。
58.所述多芯光纤三维形状传感系统200在使用时通常还需要连接一上位机400,该上位机400可以用于重构和显示多芯光纤的三维形状。所述上位机400可以通过有线或无线的形式与所述数据处理模块260连接,接收所述数据处理模块260计算出的三根纤芯的应变信息,并对该三根纤芯的应变信息进行解算,获得光纤在三维空间中的完整形状并进行三维显示。在一些实施例中,所述上位机400为一台pc机,所述数据处理模块260通过串口与该pc机通信,将所获取的3个通道的传感结果发送到pc。在一些实施例中,所述上位机400包括在所述多芯光纤三维形状传感系统200之中。
59.图5示意性地给出了光纤三维形状的重构流程,应变数据依次经过特征曲率向量分解、求解弯曲方向、求解曲率、在光纤起点位置求解初始值、求解各位置处的光纤切向量、对切向量积分最终得到空间曲线。
60.具体地,首先通过三维形状传感系统200对各纤芯的应变进行高速采集和处理,然后借助应变值可以求解光纤各点的特征分解曲率,进而确定各点处的弯曲方向,然后通过对弯曲角求导得到挠率,在确定光纤切向量和法向量的初值之后可以算得光纤总体每一点处的切向量,最后对其进行积分可以获得多芯光纤在三维空间中的完整形状。
61.相较于现有技术,本实施例提供的多芯光纤三维形状传感系统200通过三根纤芯的形变情况获取三个维度的应变信息,进而可以根据上述应变信息解算出整根光纤的形变方向,实现实时对三维物体在空间中的姿态进行重构。在本实施例提供的多芯光纤三维形状传感系统200的基础上,可以实现在使用一根单模多芯光纤的情况下,实时重构出光纤在空间中的三维形状。本实施例提供的多芯光纤三维形状传感系统200可以用于复杂三维物体的形状恢复,以及涉及到人体内部器官的医学手术中。
62.最后应说明的是:本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统或装置而言,由于其与实施例公开的方法相对应,所以描述比较简单,相关之处参见方法部分说明即可。
63.以上实施例仅用以说明本公开的技术方案,而非对其限制;尽管参照前述实施例对本公开进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本公开各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1