一种无人车巡检作业路径优化方法与流程
1.本申请涉及信息数据处理及传输技术领域,主要涉及一种无人车巡检作业路径优化方法。
背景技术:
2.随着无人驾驶技术的推广,基于l4无人驾驶技术的产品在不断更新,特别是在物流、送餐、园区巡检等领域,已经形成了一定规模的应用,针对封闭园区的巡检作业需求,l4无人巡检车具有定位精度高、臂障能力强、负载空间大的特点,被用户大量实用,随着应用的不断深入,无人车的弊端也在逐渐显现,如遇到障碍物经常发生无人车卡死、无法绕过障碍物、长时间不动等文图,这些问题正在阻碍无人车的应用。
技术实现要素:
3.本发明通过对无人巡检车作业路径优的优化计算,能够实时调整无人巡检车的运行轨迹,避免车辆卡死、无法移动、运行偏差的问题,能够极大的提高无人巡检车的运行效率。
4.为了实现上述目的,本申请提供了以下技术方案如下:
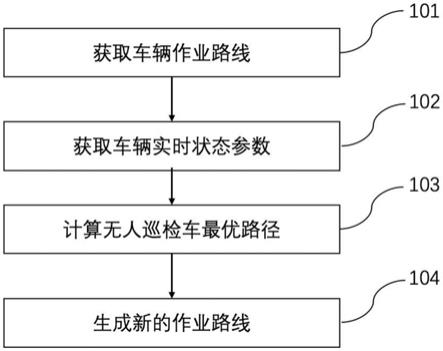
5.首先通过tcp/ip协议获取无人车巡检作业路径,可以但不局限于通过互联网、局域网方式获取数据。
6.通过websocket、mq等协议,实时获取无人车的状态数据,包括雷达、视觉识别设备的实时数据、车辆预警数据。
7.当无人车的状态为无人到达巡检目标时,系统自动计算无人巡检车的最优路径,并生成新的巡检车路径数据。
附图说明
8.为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。通过附图所示,本申请的上述及其它目的、特征和优势将更加清晰。在全部附图中相同的附图标记指示相同的部分。并未刻意按实际尺寸等比例缩放绘制附图,重点在于示出本申请的主旨。
9.图1是本申请方法流程示意图;
具体实施方式
10.为使本申请实施方式的目的、技术方案和优点更加清楚,下面将结合本申请实施方式中的附图,对本申请实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本申请一部分实施方式,而不是全部的实施方式。基于本申请中的实施方式,本领
域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本申请保护的范围。因此,以下对在附图中提供的本申请的实施方式的详细描述并非旨在限制要求保护的本申请的范围,而是仅仅表示本申请的选定实施方式。基于本申请中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本申请保护的范围。
11.实施例
12.1、通过tcp/ip协议获取无人车巡检作业路径,可以但不局限于通过互联网、局域网方式获取数据。
13.2、通过websocket、mq等协议,实时获取无人车的状态数据,包括雷达、视觉识别设备的实时数据、车辆预警数据。
14.3、当无人车的状态为无人到达巡检目标时,系统自动计算无人巡检车的最优路径,并生成新的巡检车路径数据。
技术特征:
无人车巡检作业路径优化方法,其特征在于,所述方法包括:1.通过tcp/ip协议获取无人车巡检作业路径,可以但不局限于通过互联网、局域网方式获取数据。通过websocket、mq等协议,实时获取无人车的状态数据,包括雷达、视觉识别设备的实时数据、车辆预警数据。当无人车的状态为无人到达巡检目标时,系统自动计算无人巡检车的最优路径,并生成新的巡检车路径数据。2.根据权利要求1所述方法,其特征在于,锁述无人车巡检作业路径包括无人车将停靠的全部站点及每个站点对应的经纬度信息。3.根据权利要求1所述方法,其特征在于,所述无人车的状态数据,至少应包含当前电量信息、实时经纬度信息、车辆异常告警信息。4.根据权利要求1所述方法,其特征在于,所述自动计算无人巡检车最优路径的具体方法为:确定当前车辆的经纬度信息、车辆最初停靠点信息,剩余巡检线路每个车辆停靠点的信息。以车辆当前经纬度坐标为基准,计算除车辆最初停靠点外,所有停靠点经纬度坐标与车辆当前经纬度坐标的偏差,将偏差大于5米的停靠点信息行程最新的停靠点列表。将停靠点列表,按照车辆巡检作业路径的格式要求,封装为新的巡检路径。
技术总结
本发明实例提供一种无人巡检车作业路径优化方法,提出了基于无人车巡检车停靠位置的边缘端路线优化计算、车辆运行状态实时监控、作业路径实时反馈的技术方案;本发明通过对无人巡检车作业路径优的优化计算,能够实时调整无人巡检车的运行轨迹,避免车辆卡死、无法移动、运行偏差的问题,能够极大的提高无人巡检车的运行效率。车的运行效率。车的运行效率。
技术研发人员:潘正义 夏天庆 王克强
受保护的技术使用者:北京励图锐新科技有限公司
技术研发日:2022.02.18
技术公布日:2022/5/6
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1