发动机转子与驱动轴装配状态的检测方法与流程
本发明涉及发动机装配领域,具体涉及一种发动机转子驱动轴装配状态检测方法。
背景技术:
1、航空发动机是工业皇冠上的明珠,其装配质量决定了发动机的整体性能。航空发动机转子作航空发动机的关键部件,进入总装前其装配性能的优劣决定了发动机的质量。因此,在转子交付前的性能试验,比如不平衡量检测、振动性能检测就显得十分必要。在进行航空发动机转子性能试验检测过程中,需将发动机转子与检测设备的驱动轴进行连接,而发动机转子性能的检测往往通过加速度传感器获取振动特性进行间接或直接分析,因此,设备驱动轴与发动机转子的装配状态在一定程度上影响检测结果(虽然驱动轴的结构形式往往是万向轴),高速转动下,驱动轴的轴线与发动机转子的转动轴线基本保持一致显得十分必要。现有的发动机转子和驱动轴装配状态检测方法中,检测步骤较为复杂,且检测的精度不高。
技术实现思路
1、本发明要解决的技术问题是现有技术中发动机转子驱动轴装配状态检测步骤复杂、精度不高的缺陷,提供一种发动机转子与驱动轴装配状态的检测方法。
2、本发明是通过下述技术方案来解决上述技术问题:
3、一种发动机转子与驱动轴装配状态的检测方法,用于检测航空发动机转子的装配状态,所述检测方法包括如下步骤:
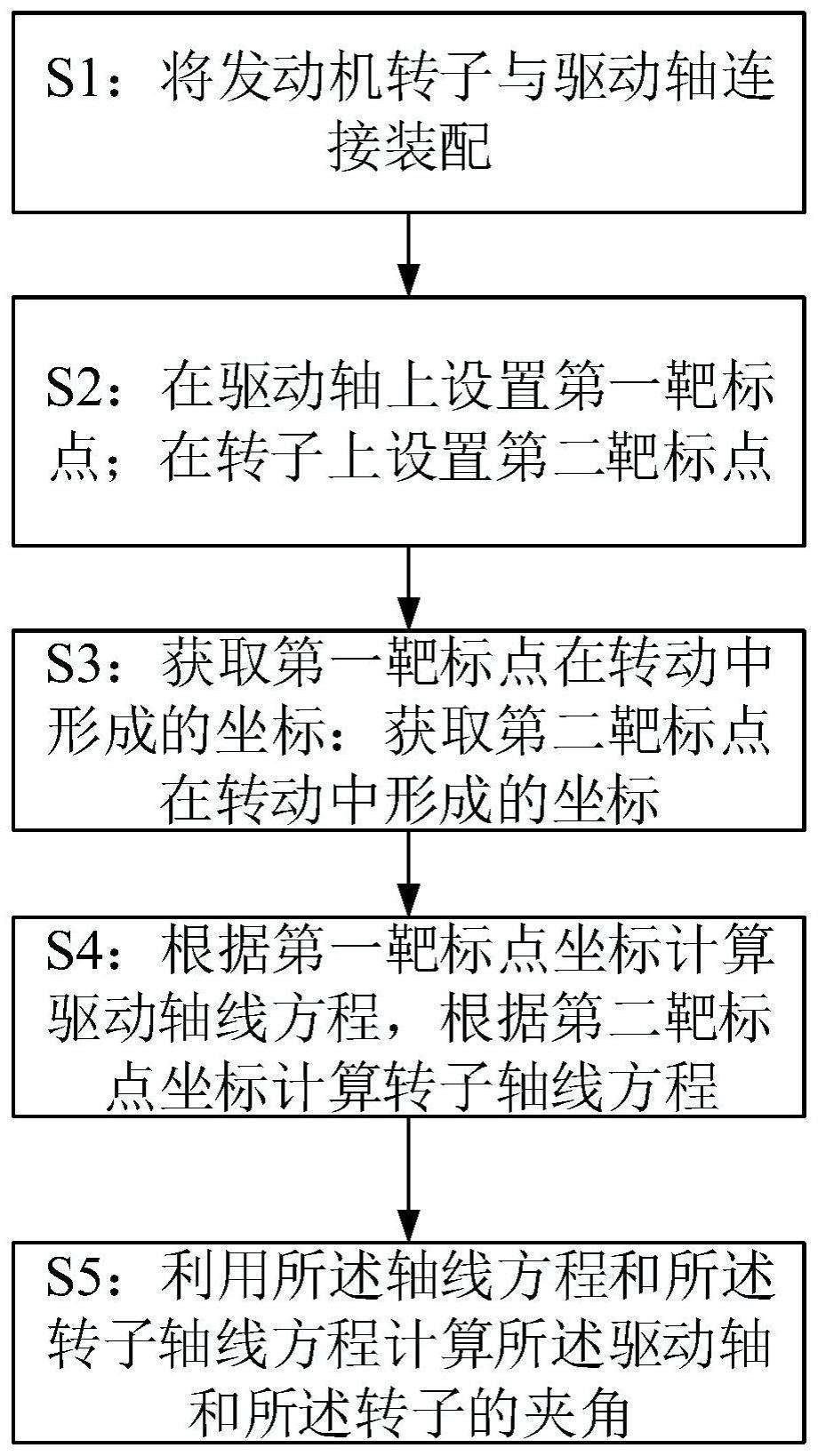
4、s1:将发动机转子与驱动轴连接装配;
5、s2:在驱动轴上设置至少两个第一靶标点;在转子上设置至少两个第二靶标点;
6、s3:获取所述第一靶标点在转动中所形成的靶标点坐标:获取所述第二靶标点在转动中所形成的靶标点坐标;
7、s4:根据获得的所述第一靶标点坐标计算驱动轴线方程,根据获得的所述第二靶标点坐标计算转子轴线方程;
8、s5:利用所述轴线方程和所述转子轴线方程计算所述驱动轴和所述转子的夹角。
9、在本方案中,将转子装配到驱动轴上,并且在驱动轴和发动机转子上分别设置至少两个第一靶标点和至少两个第二靶标点,驱动轴转动,获取对应的第一靶标点和第二靶标点的系列坐标,然后通过对坐标的数值进行处理,获得驱动轴和转子的轴线方程,然后通过得到的轴线方程计算发动机的转子和驱动轴的夹角,该夹角可以检测转子与驱动轴的装配的精度,该方法步骤少,操作简单,夹角分析可以使得转子与驱动轴的装配达到较高精度,同时为发动机的装配状态的调整提供决策,同时这也为发动机装配检测提供了一种新的方法,且该方法可用于发动机的其他领域的检测。
10、较佳地,在步骤s1中,将发动机转子放置在设备支撑上,移动所述发动机转子以使得所述发动机转子与所述驱动轴连接装配。
11、在本方案中,先将发动机的转子放置在设备支撑上,便于发动机转子与驱动轴的装配,提高发动机转子与驱动轴装配的可靠性,同时为后续的发动机转子与驱动轴检测提供基础。
12、较佳地,在步骤s2中,至少两个所述第二靶标点设于所述设备支撑处。
13、在本方案中,将第二靶标点设置在设备支撑处,支撑处与转子连接处的放置误差较小,且支撑处的转子截面较平整,可以减小靶点坐标的误差,提高转子轴线方程的拟合准确性。
14、较佳地,在步骤s2中,至少两个所述第一靶标点沿着所述驱动轴轴线间隔设置。
15、在本方案中,至少两个第一靶标点间隔设置于驱动轴上,间隔设置保证了从驱动轴上取点的随机性,提高了驱动轴方程拟合的更接近驱动轴方程,提高了驱动轴方程拟合的准确性。
16、较佳地,在步骤s3中,所述第一靶标点和所述第二靶标点的坐标通过激光跟踪仪获得。
17、在本方案中,采用激光跟踪仪获取第一靶标点和第二靶标点的坐标,可以实时检测,获取的坐标点数据更精确。
18、较佳地,在步骤s2中,设置所述驱动轴处的第一靶标点为q1、q2,转动所述转子获取第一靶标点为q1、q2在转动过程中所形成的一系列的靶点坐标,
19、{(1q1x,1q1y,1q1z),(2q1x,2q1y,2q1z),…,(nq1x,nq1y,nq1z)}
20、{(1q2x,1q2y,1q2z),(2q2x,2q2y,2q2z),…,(nq2x,nq2y,nq2z)};
21、式中,
22、iq1x表示靶标点q1转动过程中生成的第i个点的x坐标;
23、iq1y表示靶标点q1转动过程中生成的第i个点的y坐标;
24、iq1z表示靶标点q1转动过程中生成的第i个点的z坐标;
25、iq2x表示靶标点q2转动过程中生成的第i个点的x坐标;
26、iq2y表示靶标点q2转动过程中生成的第i个点的y坐标;
27、iq2z表示靶标点q2转动过程中生成的第i个点的z坐标。
28、在本方案中,驱动轴转动获取的坐标值为后面的驱动轴方程计算提供数据基础。
29、较佳地,在步骤s4中,利用最小二乘法获取驱动轴线方程,获取的驱动轴线方程采用的公式如下:
30、
31、式中,
32、rq1、rq2指的是第一靶标点q1、q2相对于回转中心的半径;
33、(q1x,q1y,q1z)表示q1点构成的圆心坐标;
34、(q2x,q2y,q2z)表示q2点构成的圆心坐标;
35、f1、f2表示求解q1、q2最小二乘方程;
36、f表示构成驱动轴转动轴线的轴线方程。
37、在本方案中,采用最小二乘法拟合出的直线方程误差小,更接近真实值。
38、较佳地,在步骤s2中,设置转子处的第二靶标点为p1、p2,转动转子获取所述第二靶标点为p1、p2在转动过程中所形成的一系列的靶点坐标,
39、{(1p1x,1p1y,1p1z),(2p1x,2p1y,2p1z),…,(np1x,np1y,np1z)};
40、{(1p2x,1p2y,1p2z),(2p2x,2p2y,2p2z),…,(np2x,np2y,np2z)};
41、式中,
42、ip1x表示靶标点p1转动过程中生成的第i个点的x坐标;
43、ip1y表示靶标点p1转动过程中生成的第i个点的y坐标;
44、ip1z表示靶标点p1转动过程中生成的第i个点的z坐标;
45、ip2x表示靶标点p2转动过程中生成的第i个点的x坐标;
46、ip2y表示靶标点p2转动过程中生成的第i个点的y坐标;
47、ip2z表示靶标点p2转动过程中生成的第i个点的z坐标。
48、在本方案中,转子转动获取的坐标值为后面的转子方程计算提供数据基础。
49、较佳地,在步骤s4中,利用最小二乘法获取转子轴线方程,获取的轴线方程采用的公式如下:
50、
51、式中,
52、rp1、rp2指的是第二靶标点p1、p2相对于回转中心的半径;
53、(p1x,p1y,p1z)表示p1点构成的圆心坐标;
54、(p2x,p2y,p2z)表示p2点构成的圆心坐标;
55、g1、g2表示求解p1、p2最小二乘方程。
56、在本方案中,采用最小二乘法拟合出的直线方程误差小,更接近真实值。
57、较佳地,所述转子与所述驱动轴的夹角计算公式如下:
58、。
59、在本方案中,通过获取的转子和驱动轴方程计算夹角,为转子与驱动轴的装配状态检测提供依据。
60、在符合本领域常识的基础上,上述各优选条件,可任意组合,即得本发明各较佳实例。
61、本发明的积极进步效果在于:将转子装配到驱动轴上,并且在驱动轴和发动机转子上分别设置至少两个第一靶标点和至少两个第二靶标点,驱动轴转动,获取对应的第一靶标点和第二靶标点的系列坐标,后通过对坐标的数值进行处理,获得驱动轴和转子的方程,后通过得到的轴线方程计算发动机的转子和驱动轴的夹角,该夹角可以检测转子与驱动轴的装配的精度,该方法步骤少,操作简单,夹角分析可以使得转子与驱动轴的装配达到较高精度,同时为发动机的装配状态的调整提供决策,同时这也为发动机装配检测提供了一种新的方法,且该方法可用于发动机的其他领域的检测。
- 还没有人留言评论。精彩留言会获得点赞!