一种超导磁悬浮列车测试平台及扰动抵抗方法与流程
1.本发明属于车辆磁力悬置或悬浮技术领域,具体为一种超导磁悬浮列车测试平台及扰动抵抗方法。
背景技术:
2.磁悬浮列车是通过电磁力实现列车与轨道之间的无接触的悬浮和导向,不但运行速度快,而且运行平稳、舒适;无噪音,不排出有害的废气,有利于环境保护。超导材料因其无阻高电流密度的特性,是用于产生磁悬浮列车悬浮力的有力选择。
3.在超导磁悬浮列车中运行过程中,超导磁体可能在某种突发的扰动或本征的缺陷作用下进入失超状态。在该种状态下,为保护列车,需要对超导磁体进行释能处理。同时,由于列车处于高速运动状态,需要保证释能过程中列车运行状态相对平稳,保证车内人员安全。因此有必要对磁体释能过程中列车的动作进行优化设计,并测量不同动作下,列车整体的动力学情况,确保释能过程的安全有效。在常规列车测试系统中,列车不含超导磁体,因此不需要该种测试。另一方面,超导磁体价格昂贵,直接采用超导磁体测试会使得测试系统经济效益低下。且由于列车保护动作不成熟,可能在测试过程中出现保护失败的情况,造成极大的经济损失。
4.由于超导材料特殊的闭环运行条件和失超传播特性,目前对超导磁悬浮列车的控制策略还不明确.因此,有必要建设一种高效、经济可行的测试平台,模拟列车在形式过程中遇到的各种干扰、震动抵抗以及在超导线圈失超情况下的运动特性,进而优化控制策略,保证车体平稳、安全运行。
技术实现要素:
5.针对背景技术中存在的问题,本发明提供了一种超导磁悬浮列车测试平台,其特征在于,包括:数据收集模块、姿态预估模块、转向架姿态调整模块、车体底盘、作动器和空气弹簧组件、转向架、永磁转盘和测试槽,其中车体底盘通过作动器和空气弹簧组件与下方的转向架相连,转向架设置于测试槽的中央;n组永磁转盘通过转盘电机安装于转向架上,用于提供n组导向力和悬浮力,其中n≥4;
6.数据收集模块、姿态预估模块和转向架姿态调整模块顺序相连,转向架姿态调整模块用于调整姿态和发送扰动,数据收集模块用于收集测试平台各处数据。
7.所述永磁转盘中永磁体磁场强化方向为转盘轴向向外;所述永磁转盘按圆周方向分为八个部分。
8.每组导向力和悬浮力由对称设置的两对永磁转盘提供,每对永磁转盘由两个转动方向相反的永磁转盘组成,且每对永磁转盘相对于转向架的中央面的对称,转向架的中央面与测试槽的中央面共面。
9.所述转向架姿态调整模块主动发送扰动的形式为直接通过转向架姿态调整模块调节转速、或者通过转向架姿态调整模块向额外的线圈扰动系统发送信号以产生扰动。
10.当主动发送扰动的形式为通过转向架姿态调整模块向额外的线圈扰动系统发送信号以产生扰动时,测试平台还包括线圈扰动系统,由导电材料绕制成的线圈,安装在测试车体转向架表面或测试槽中;
11.当直接通过转向架姿态调整模块调节转速时,在永磁转盘中的对永磁体进行不规则布置、或者在测试槽进行不规则刻划、或者在地面部分与转盘对应位置不规则地布置永磁体,使得永磁转盘转动时与地面部分产生电磁力扰动,使得车体振动。
12.还提供了一种所述超导磁悬浮列车测试平台的扰动抵抗方法,其特征在于,包括:
13.步骤1、录入初始状态;运行测试平台,通过转向架姿态调整模块在永磁转盘的持续旋转是同时施加扰动;
14.步骤2、数据收集模块收集k-1时刻的信息并发送给姿态预估模块;姿态预估模块对k时刻列车状态进行预估;
15.步骤3、数据收集模块收集k时刻的信息并发送给姿态预估模块;姿态预估模块根据目标状态对列车驱动线圈、作动器及磁体加热器施加电流以抵抗扰动;
16.步骤4、更新初始状态并返回步骤2。
17.所述步骤2包括:
18.步骤21、收集k-1时刻前的信息,包括列车k-1时刻的状态x
k-1
=(zi,vj,θ
l
,ωm,in),包含列车的转向架前一时刻坐标位置zi、转向架前一时刻速度vj、转向架前一时刻角度θ
l
,、转向架转角时的前一时刻角速度ωm和各超导磁体中前一时刻电流in;
19.步骤22、根据k-1时刻前的信息,对列车k-1时刻的状态x
k-1
=(zi,vj,θ
l
,ωm,in)进行评估,对初始状态进行覆盖,记为表示根据n时刻前的信息,对m时刻列车状态的预估;其中初始状态一般已知,同时将0时刻的预估误差p
0|0
设置为零矩阵,作为迭代起点;
20.步骤23、为了稳定列车运行,在k-1时刻,控制列车的驱动线圈、作动器、磁体加热器电流整理为操作向量uk=(oj,p
l
,qm);
21.根据各控件与列车的物理规律,对k时刻列车状态进行预估其中fk表示列车状态x
k-1
会随时间自然改变,在k时刻演变记为fkx
k-1
;fk包含车厢动力学变化以及超导磁体电流变化;向量wk为在时间演化过程中存在的随机噪音;
22.其中bkuk为k时刻状态影响量,uk为操作向量;
23.所述步骤3包括:
24.步骤31、在k时刻,再次读取实际传感器数据zk=(pi,vj,a
l
,im),其中转向架k时刻的实际坐标位置为pi、转向架各位置在k时刻的实际速度为vj、转向架各位置在k时刻的实际加速度为a
l
和各超导磁体在k时刻的实际电流为im;列车状态与传感器信号间的传递函数矩阵记为hk,zk=hkxk+vk;其中vk为传感器的测量误差向量,测量误差对应协方差为rk的正态分布vk~n(0,rk);
25.步骤32、计算预测状态与测量状态的差计算协方差和最佳卡尔曼增益预估的误差为预估误差对应协方差为qk的正态分布wk~n(0,qk);
26.步骤33、利用卡尔曼增益值更新对当前状态的评估并更新估计协方差协方差其中i为单位矩阵;
27.步骤34、针对更新后的当前状态进行评估,基于根据目标状态x
t
对列车驱动线圈、作动器及磁体加热器施加电流u
k+1
,抵抗扰动;其中目标状态其中f
k+1
为自然演变矩阵,b
k+1
为操作影响矩阵。
28.所述
29.其中dt是单步操作时间步长,f
vo
与f
vp
分别是驱动线圈与作动器在当前轨道位置的动力系数,m为列车质量;m
wo
与m
wp
为驱动线圈与转向架在当前轨道位置的扭矩系数,l为列车的转动惯量;rq为磁体加热器功率系数,c
hts
为超导线圈热容项;o、p、q分别为驱动线圈、作动器和磁体加热器在k-1时刻的电流。
30.所述x
t
=(z
it
,v
jt
,θ
lt
,ω
mt
,i
nt
),其中的含转向架位移的目标坐标z
it
、转向架的目标速度v
jt
、转向架位移的角度θ
lt
和转向架改变的角速度ω
mt
均为0,i
nt
为各超导磁体中目标电流。
31.步骤4中初始状态更新为
32.本发明的有益效果在于:
33.1.通过本发明的测试平台,能够高效模拟列车悬浮情况,且避免了测试车体中的超导磁体供电、制冷等系列工程问题,提高测试效率。
34.2.使用永磁体模拟超导线圈的情况。
35.3.针对扰动问题,采用新的预估方法,在介入了系统与测量误差实时评估修正后,提高状态评估准确度,避免了主动控制结果发散的情况。
附图说明
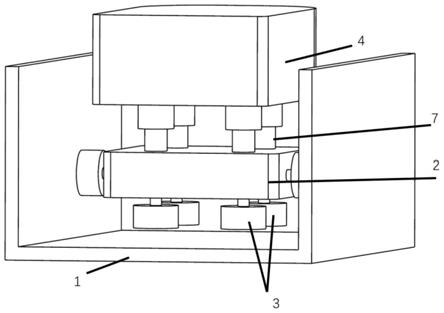
36.图1为本发明一种超导磁悬浮列车测试平台实施例1的结构示意图;
37.图2为本发明实施例1的流程示意图;
38.图3为本发明实施例2的结构示意图;
39.图4为本发明实施例3的结构示意图;
40.图5为本发明实施例4的结构示意图。
41.图中,1-测试槽,2-转向架,3-永磁转盘,4-车体底盘,6-线圈,7-作动器和空气弹簧组件。
具体实施方式
42.以下结合附图对本发明作进一步的详细说明。
43.如图1所示的本发明实施例,包括:数据收集模块、姿态预估模块、转向架姿态调整模块、车体底盘4、四组作动器和空气弹簧组件7、转向架2、永磁转盘3和测试槽1,其中车体底盘4通过作动器和空气弹簧组件7与下方的转向架2相连,转向架2设置于测试平台的测试
槽1的中央;四组作动器和空气弹簧组件7呈2*2矩形阵列设置在转向架2四个角的方向上,即,分别位于前进方向的左前、右前、左后和右后四个位置,n组永磁转盘通过转盘电机(图中未示出)安装于转向架2上,用于提供n组导向力和悬浮力,其中n≥4;每组导向力和悬浮力由对称设置的两对永磁转盘3提供,每对永磁转盘3由两个转动方向相反的永磁转盘3组成,且每对永磁转盘3相对于转向架2的中央面的对称,转向架2的中央面与测试槽1的中央面共面。
44.数据收集模块、姿态预估模块和转向架姿态调整模块顺序相连,用于调整姿态和主动发送扰动的转向架姿态调整模块与各作动器和各转盘电机相连,用于收集测试平台各处数据的数据收集模块与各传感器相连;主动发送扰动的形式为直接通过转向架姿态调整模块调节转速、或者通过转向架姿态调整模块向额外的线圈扰动系统发送信号以产生扰动;当直接通过转向架姿态调整模块调节转速时,在永磁转盘中的对永磁体进行不规则布置、或者在测试槽1(地面部分表面)进行不规则刻划,使得地面部分表面凹凸不平、或者在地面部分与转盘对应位置不规则地布置永磁体,使得永磁转盘转动时与地面部分产生电磁力扰动,使得车体振动。
45.由对称设置的两对永磁转盘3提供一组导向力和悬浮力的技术方案包括以下两种技术方案之一:用一对永磁转盘3提供一组导向力和悬浮力的技术方案、或用两对永磁转盘3提供一组导向力和悬浮力的技术方案;
46.永磁转盘3中布置有一组或多组在圆周方向上周期排列的永磁体磁场,永磁体磁场的强化方向为转盘轴向向外;具体的,按圆周方向分为八个部分;当永磁体充磁方向为沿圆盘轴向或圆周方向时,可以是在轴向n极s极交错排列,也可以是按海尔贝克方式充磁,磁场强化方向为面对地面部分方向。当永磁体充磁方向为沿圆盘径向或圆周方向时,可以是在径向n极s极交错排列,也可以是按海尔贝克方式充磁,磁场强化方向为转盘轴向向外。
47.可选的,在永磁转盘远离车体的端面上添加铁磁材料,进而强化磁场。
48.在本实施例中,传感器包括:电流传感器和位移传感器;其中位移传感器共有4个,分别为:设置于转向架2上平面四个角的四个传感器、以及下方四个角的四个传感器;电流传感器包括:各转盘电机的电流传感器、作动器的电流传感器和磁体加热器的电流传感器。
49.在本实施例中,数据收集模块还和手动输入设备相连,以直接输入初始状态时的基础位置信息,同时在优化时更改信息。
50.在本实施例中,测试槽1为高电导率材料,例如铜或者铝;
51.测试平台工作时,所使用的扰动抵抗方法包括以下步骤:
52.步骤1、录入初始状态中的各种信息;基于设计的开始条件运行测试平台,转向架姿态调整模块使得永磁转盘的持续旋转,且对整个测试平台持续的施加扰动;
53.步骤2、数据收集模块收集k-1时刻的信息并发送给姿态预估模块;姿态预估模块对k时刻列车状态进行预估;
54.步骤3、数据收集模块收集k时刻的信息并发送给姿态预估模块;姿态预估模块根据目标状态;
55.步骤4、更新初始状态并返回步骤2。
56.姿态预估模块的初始化工作步骤如下:
57.步骤21、收集k-1时刻前的信息,包括列车k-1时刻的状态x
k-1
=(zi,vj,θ
l
,ωm,in),
包含列车的转向架前一时刻坐标位置zi、转向架前一时刻速度vj、转向架前一时刻角度θ
l
,、转向架转角时的前一时刻角速度ωm和各超导磁体中前一时刻电流in。
58.步骤22、根据k-1时刻前的信息,对列车k-1时刻的状态x
k-1
=(zi,vj,θ
l
,ωm,in)进行评估,对初始状态进行覆盖,记为表示根据n时刻前的信息,对m时刻列车状态的预估;其中初始状态一般已知,同时将0时刻的预估误差p
0|0
设置为零矩阵,作为迭代起点。
59.步骤23、为了稳定列车运行,在k-1时刻,控制列车的驱动线圈、作动器(即转向架电机)、磁体加热器电流整理为操作向量uk=(oj,p
l
,qm);
60.根据各控件与列车的物理规律,可以对k时刻列车状态进行预估其中fk表示列车状态x
k-1
会随时间自然改变,在k时刻演变记为fkx
k-1
;fk主要包含车厢动力学变化以及超导磁体电流变化,主要通过理论计算得出。动力学变化可依据车厢质量分布、当前轨道形状,通过牛顿运动定律得出;向量wk为在时间演化过程中存在的随机噪音。
61.超导磁体电流变化分为两种情况;在超导磁体正常工作时,可以认为磁体中电流稳定,即永磁体电机转速稳定;当超导磁体失超时,电流会随时间降低,对应为转盘转速降低;当磁体加热器启动后,电流指数降低,在本测试平台中对应为永磁体电机(永磁转盘)的转速指数降低。
62.根据列车对操作向量uk的物理响应,通过理论计算可得对k时刻状态影响量为bkuk。bk由驱动线圈、作动器、磁体加热器参数以及列车参数、预先输入的轨道条件共同决定。
63.例如在简化情况下,可以忽略操作对位置、角度的影响有
[0064][0065]
其中dt是单步操作时间步长,f
vo
与f
vp
分别是驱动线圈与作动器在当前轨道位置的动力系数,m为列车质量;m
wo
与m
wp
为驱动线圈与转向架在当前轨道位置的扭矩系数,l为列车的转动惯量;rq为磁体加热器功率系数,c
hts
为超导线圈热容项;o、p、q分别为驱动线圈、作动器和磁体加热器在k-1时刻的电流。
[0066]
步骤31、在k时刻,再次读取实际传感器数据zk=(pi,vj,a
l
,im),其中转向架k时刻的实际坐标位置为pi、转向架各位置在k时刻的实际速度为vj、转向架各位置在k时刻的实际加速度为a
l
和各超导磁体在k时刻的实际电流为im;列车状态与传感器信号间的传递函数矩阵记为hk,hk为传感器位置、超导线圈参数等输入的参数,有zk=hkxk+vk;其中vk为传感器的测量误差向量,测量误差对应协方差为rk的正态分布vk~n(0,rk)。
[0067]
步骤32、计算预测状态与测量状态的差计算协方差和最佳卡尔曼增益预估的误差为预估误差对应协方差为qk的正态分布wk~n(0,qk)。
[0068]
步骤33、利用卡尔曼增益值更新对当前状态的评估并更新估计
协方差协方差其中i为单位矩阵。
[0069]
步骤34、针对更新后的当前状态进行评估,基于根据目标状态x
t
对列车驱动线圈、作动器及磁体加热器施加电流u
k+1
,抵抗扰动,以模拟抵抗列车车厢振动,使得车厢保持稳定;其中目标状态稳定;其中目标状态其中f
k+1
为自然演变矩阵,b
k+1
为操作影响矩阵。
[0070]
在本实施例中,x
t
=(z
it
,v
jt
,θ
lt
,ω
mt
,i
nt
),其中的含转向架位移的目标坐标z
it
、转向架的目标速度v
jt
、转向架位移的角度θ
lt
和转向架改变的角速度ω
mt
均为0;各超导磁体中目标电流i
nt
为稳定值,具体的,取200安培。
[0071]
步骤4中具体的,初始状态更新同时,通过测试平台中各传感器反馈的数据,可以验证每次控制预估算法的有效性,并优化姿态预估模块中fk、bk、hk、qk、rk、f
k+1
、b
k+1
等矩阵的设计。
[0072]
如图1和图4所示的实施例,当用两对永磁转盘3提供一组导向力和悬浮力时,任意一对永磁转盘3的轴线与中央面平行,另一对永磁转盘3的轴线与中央面垂直;且任意一对永磁转盘3设置于转向架2的下方,另一对永磁转盘3设置于转向架2的侧面;此时,测试槽1的形状为u形;设置于转向架2的下方或设置于转向架2的侧面的n个永磁转盘3的轴线朝向相同;
[0073]
具体的,在如图1所示的实施例中,设置于转向架2下方和两侧的永磁转盘3的转盘方向均与前后方向平行;设置于转向架2下方的永磁转盘3的轴线与中央面平行,设置于转向架2两侧的永磁转盘3的轴线与中央面垂直。在如图4所示的实施例中,设置于转向架2下方的永磁转盘3的转盘方向均与前后方向平行,设置于转向架2两侧的永磁转盘3的转盘方向与前后方向垂直;设置于转向架2下方的永磁转盘3的轴线与中央面垂直,设置于转向架2两侧的永磁转盘3的轴线与中央面平行。
[0074]
如图3和图5所示的实施例,当用一对永磁转盘3提供一组导向力和悬浮力时,永磁转盘3的轴线与中央面的夹角呈锐角;此时,测试槽1的形状为v形,测试槽1的槽底设有对称的倾斜面,角度与永磁转盘3的轴线与中央面所呈的夹角相同;
[0075]
设置于转向架2的一侧的n个永磁转盘3的轴线朝向相同;具体的,在图2和图4所示的实施例中,永磁转盘3的轴线与中央面呈45
°
的夹角。
[0076]
如图3和图5所示的实施例,当主动发送扰动的形式为通过转向架姿态调整模块向额外的线圈扰动系统发送信号以产生扰动时;测试平台还包括线圈扰动系统,由导电材料绕制成的线圈6,安装在测试车体转向架表面或测试槽1中,线圈6中通受控的交流电,使得转向架表面产生涡流,使得扰动测试槽1与转向架、测试车体之间产生不对称电磁力,与进而破坏测试车体的稳定悬浮,并产生振动;导电材料包含铜或者铝。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1