一种动密封实验台机械振动特性试验识别方法
1.本发明属于旋转机械动密封技术领域,特别涉及一种动密封实验台机械振动特性试验识别方法。
背景技术:
2.旋转机械是现代工业体系中最重要的动力装备之一,广泛应用于航空航天、能源化工、国防军工等事关国民经济和国防安全的领域中。动密封装置作为燃气轮机、航空发动机等旋转机械中的关键部件之一,通常被安装在旋转机械动静间隙处来限制高低压区域间的泄漏流动,从而降低泄漏量,提高旋转机械运行效率。此外,动密封装置内气流激振诱发的自激振动是导致旋转机械轴系失稳的重要原因之一,限制了旋转机械出力,并严重威胁旋转机械的安全稳定运行。因此,通过实验深入开展动密封装置转子动力特性研究,对发展高性能动密封装置、提高旋转机械运行的经济性、安全性和可靠性具有重要的工程实际价值。
3.谐波激励机械阻抗法是一种可以准确高效地测量动密封装置频率相关转子动力特性系数的实验方法,该方法通过将目标工况下实验台系统阻抗系数减去实验台机械阻抗系数来获得所测量的动密封阻抗系数,进而获得动密封转子动力特性系数。因此,获得准确的动密封实验台机械振动特性,即实验台机械阻抗系数,是准确测量动密封转子动力特性系数的基础。
4.静子质量矩阵是识别动密封实验台机械阻抗系数过程中的重要参数,目前通常用静子称量质量来表示。然而,在实验台制造、安装和运行过程中难免会存在质量不平衡或静态不对中的问题,导致使用静子称量质量代替静子质量矩阵获得的实验台机械阻抗系数的精度难以满足实验精度要求,亟需一种新的动密封实验台机械振动特性试验识别方法。
技术实现要素:
5.为了克服上述现有技术的缺点,本发明的目的在于提供一种动密封实验台机械振动特性试验识别方法,以解决上述存在的一个或多个技术问题。本发明可以准确确定静子质量矩阵并识别动密封实验台机械阻抗系数,为准确测量动密封转子动力特性系数、深入开展动密封转子动力特性研究提供了可靠支撑。
6.为了实现上述目的,本发明采用的技术方案是:
7.一种动密封实验台机械振动特性试验识别方法,包括以下步骤:
8.步骤1,对于动密封实验中所研究的激振频率范围,选取能够覆盖整个频率区间的激振频率序列fi(i=1,
…
,n);依次启动测量系统和激振系统,对于各个激振频率fi重复步骤2和步骤3;
9.步骤2,通过计算机发出一对谐波激励信号使一对激振器激振静子;待静子涡动轨迹稳定后,同步采集静子涡动参数,并利用快速傅里叶变换转换为频域下的物理量,得到频域下的静子动力学参数;
10.步骤3,通过计算机发出一对与步骤2中的谐波激励信号幅值互不相关的谐波激励信号,并重复激振试验,得到又一组频域下的静子动力学参数;
11.步骤4,给定静子质量矩阵初值m
s0
,将步骤1至步骤3中测得的n个激振频率fi(i=1,
…
,n)对应的频域下的物理量分别代入频域下的静子动力学方程组,求解方程组得到各个激振频率下的实验台机械阻抗系数h
bl,ij
,计算其实部re(h
bl,ij
)关于激振角频率ω的线性拟合函数斜率k
ij
;
12.步骤5,以静子质量矩阵ms为优化变量,以各个实验台机械阻抗系数实部re(h
bl,ij
)关于激振角频率ω的线性拟合函数斜率的绝对值|k
ij
|为优化目标,对ms进行优化并重复步骤4,直到各个优化目标均满足|k
ij
|《0.01,得到实际静子质量矩阵m
st
;
13.步骤6,取静子质量矩阵ms=m
st
,将步骤1至步骤3中测得的n个激振频率fi(i=1,
…
,n)对应的频域下的物理量分别代入频域下的静子动力学方程组,求解方程组得到不同激振频率下的动密封实验台机械阻抗系数h
bl,ij
。
14.在一个实施例中,所述步骤2和步骤3中,所述一对谐波激励信号激振频率为fi、初相位相差90
°
,激振力幅值的取值应保证静子受到激振后涡动位移峰值不超过密封间隙的10%。
15.在一个实施例中,所述步骤2中,得到的频域下的静子动力学参数包括两个激振方向的涡动位移d
xx
和d
xy
、涡动加速度a
xx
和a
xy
,以及受到的激振力f
exx
和f
exy
;所述步骤3中,得到的又一组频域下的静子动力学参数包括两个激振方向的涡动位移d
yx
和d
yy
、涡动加速度a
yx
和a
yy
,以及受到的激振力f
eyx
和f
eyy
。
16.在一个实施例中,所述步骤4和步骤6中,所述频域下的静子动力学方程组基于应用快速傅里叶变换的小位移涡动理论,在无进气条件下的静子动力学方程组可以表示为:
[0017][0018]
式中,ms是静子质量矩阵,可以用4个静子质量系数表示为:
[0019][0020]hbl,xx
是x方向直接机械阻抗系数,h
bl,xy
是x方向交叉机械阻抗系数,h
bl,yy
是y方向直接机械阻抗系数,h
bl,yx
是y方向交叉机械阻抗系数,可以将上述4个实验台机械阻抗系数简记为h
bl,ij
。
[0021]
在一个实施例中,所述步骤4中,静子质量矩阵初值m
s0
由静子称量质量m0给定:
[0022][0023]
在一个实施例中,所述步骤4中,实验台机械阻抗系数实部re(h
bl,ij
)关于激振角频率ω的线性拟合函数斜率k
ij
由最小二乘法进行计算。
[0024]
与现有技术相比,本发明用优化得到的实际静子质量矩阵代替静子称量质量,修正了由于实验台制造、安装和运行过程中存在的质量不平衡或静态不对中问题产生的测量误差,能够准确识别动密封实验台机械阻抗系数,为准确测量动密封转子动力特性系数、深
入开展动密封转子动力特性研究提供了可靠支撑。
附图说明
[0025]
为了更加清晰地说明本发明的技术方案和实施例,下面对发明内容或实施例的描述中所需使用的附图做简要介绍。显然,下述附图是本发明的一个实施例,不应被视为对本发明的限制,本领域普通技术人员可以在不脱离本发明的技术原理前提下对实施例进行修改、替换或改进,从而获得其他附图。
[0026]
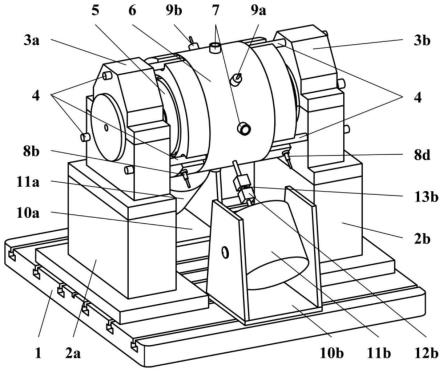
图1是本发明实施例的动密封实验台的结构示意图;
[0027]
图2是本发明实施例的动密封实验台另一视角的结构示意图;
[0028]
图3是本发明实施例的动密封实验台机械振动特性试验识别方法流程图;
[0029]
图4是本发明实施例的动密封实验台直接机械阻抗系数实部的频率相关性拟合结果;其中,(a)为x方向,(b)为y方向。
[0030]
附图标记说明:
[0031]
1-t型平台;2a-支撑座一;2b-支撑座二;3a-轴承座一;3b-轴承座二;4-支撑杆;5-转子;6-静子;7-进气口;8a-位移传感器一;8b-位移传感器二;8c-位移传感器三;8d-位移传感器四;9a-加速度传感器一;9b-加速度传感器二;10a-激振器支架一;10b-激振器支架二;11a-激振器一;11b-激振器二;12a-激振杆一;12b-激振杆二;13a-力传感器一;13b-力传感器二。
具体实施方式
[0032]
为了更加清晰地说明本发明的目的、技术方案和技术优点,下面参照附图并举实施例对本发明做进一步详细描述。显然,所描述的实施例是本发明一部分实施例,旨在用于解释本发明,而不能理解为对本发明的限制。基于本发明公开的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的其他实施例,都属于本发明的保护范围。
[0033]
请参阅图1和图2,待测量的动密封实验台中,转子5和静子6同心居中布置,转子5两端分别安装在轴承座一3a和轴承座二3b内设置的转子支撑轴承上,静子6由六根支撑杆4支撑。动密封实验台包括激振系统,其中,激振杆一12a和激振杆二12b沿转子5径向正交地布置在静子6轴向对称面上,且关于垂直方向对称布置,定义沿激振杆一12a方向为x轴,沿激振杆二12b方向为y轴;激振器一11a和激振器二11b分别与激振杆一12a和激振杆二12b刚性连接,用于为静子6提供稳定的谐波激励。动密封实验台包括测量系统,其中,位移传感器一8a和位移传感器三8c与激振杆一12a同向布置,且沿转子5径向固定在静子6上,用于测量静子6沿x方向的涡动位移;位移传感器二8b和位移传感器四8d与激振杆二12b同向布置,且沿转子5径向固定在静子6上,用于测量静子6沿y方向的涡动位移;加速度传感器一9a和加速度传感器二9b分别与激振杆一12a和激振杆二12b共线布置,且沿转子5径向固定在静子6上,用于测量静子6沿x方向和y方向的涡动加速度;力传感器一13a和力传感器二13b分别设置于激振杆一12a和激振杆二12b中间连接处,用于测量静子6沿x方向和y方向受到的激振力。动密封实验台包括计算机,用于发出特定的谐波激励信号到激振器一11a和激振器二11b,并用于监测和记录测量系统采集的位移、加速度和激振力信号。
[0034]
请参阅图3,本发明实施例的一种动密封实验台机械振动特性试验识别方法,包括
以下步骤:
[0035]
步骤1,对于动密封实验中所研究的激振频率范围,选取能够覆盖整个频率区间的激振频率序列fi(i=1,
…
,n);依次启动测量系统和激振系统,对于各个激振频率fi重复步骤2和步骤3;
[0036]
步骤2,通过计算机发出一对激振频率为fi、初相位相差90
°
的谐波激励信号,使激振器一11a和激振器二11b激振静子6,从而使静子6偏离中心位置进行小位移椭圆轨迹涡动;示例地,计算机发出的一对谐波激励信号可以表示为:
[0037]ex
=a1cos(2πfit),ey=b1sin(2πfit)(7)
[0038]
式中,e
x
和ey分别是激振器沿x方向和y方向输出的激振力关于时间t的函数;a1和b1分别是激振器沿x方向和y方向输出的激振力幅值,其取值应保证静子6涡动位移峰值不超过密封间隙大小的10%;
[0039]
待静子6涡动轨迹稳定后,通过计算机同步采集位移传感器、加速度传感器和力传感器信号,并利用快速傅里叶变换转换为频域下的物理量,得到频域下静子6的动力学参数,包括涡动位移d
xx
和d
xy
、涡动加速度a
xx
和a
xy
,以及受到的激振力f
exx
和f
exy
;
[0040]
步骤3,通过计算机发出一对与步骤2中的谐波激励信号幅值互不相关的谐波激励信号,并重复激振试验,得到频域下静子6的涡动位移d
yx
和d
yy
、涡动加速度a
yx
和a
yy
,以及受到的激振力f
eyx
和f
eyy
;示例地,计算机发出的又一对谐波激励信号可以表示为:
[0041]ex
=a2cos(2πfit),ey=b2sin(2πfit)
ꢀꢀ
(8)式中,激振器沿x方向和y方向输出的激振力幅值(a2,b2)与(a1,b1)不相关;
[0042]
步骤4,无进气条件下,基于应用快速傅里叶变换的小位移涡动理论,得到频域下的静子6动力学方程组:
[0043][0044]
式中,ms是静子质量矩阵,可以用4个静子质量系数表示为:
[0045][0046]hbl,xx
是x方向直接机械阻抗系数,h
bl,xy
是x方向交叉机械阻抗系数,h
bl,yy
是y方向直接机械阻抗系数,h
bl,yx
是y方向交叉机械阻抗系数;可以将上述4个实验台机械阻抗系数简记为h
bl,ij
,机械阻抗系数定义为:
[0047]hbl,ij
=k
bl,ij
+j(ωc
bl,ij
)
ꢀꢀ
(11)
[0048]
式中,k
bl,ij
是实验台机械刚度系数;c
ij
是实验台机械阻尼系数;j是虚数单位;ω=2πf是激振频率f对应的角频率;
[0049]
由静子6称量质量m0给定静子质量矩阵初值m
s0
:
[0050][0051]
取静子质量矩阵ms=m
s0
,将步骤1至步骤3中测得的n个激振频率fi(i=1,
…
,n)对应的频域下的物理量分别代入公式(3)并求解方程组,得到各个激振频率下的实验台机械
阻抗系数h
bl,ij
,采用最小二乘法计算其实部re(h
bl,ij
)关于激振角频率ω的线性拟合函数斜率k
ij
;
[0052]
步骤5,无进气条件下,密封内的气体几乎不被压缩,因此实验台机械刚度系数k
bl,ij
是频率无关的,即当静子质量矩阵ms取值正确时,由步骤4计算得到的线性拟合函数斜率k
ij
应均为0;
[0053]
以静子质量矩阵ms为优化变量,以各个实验台机械阻抗系数实部re(h
bl,ij
)关于激振角频率ω的线性拟合函数斜率的绝对值|k
ij
|为优化目标,对ms进行优化计算并重复步骤4,直到各个优化目标均满足|k
ij
|《0.01,得到实际静子质量矩阵m
st
;示例地,请参阅图4,给出了取不同静子质量矩阵时实验台直接机械阻抗系数实部re(h
bl,xx
)和re(h
bl,yy
)的频率相关性拟合结果,从(a)和(b)可以看出,当静子质量矩阵取值有偏差时,实验台机械阻抗系数实部都具有强频率相关性,而采用实际静子质量矩阵时识别得到的实验台机械阻抗系数几乎频率无关;
[0054]
步骤6,取静子质量矩阵ms=m
st
,将步骤1至步骤3中测得的n个激振频率fi(i=1,
…
,n)对应的频域下的物理量分别代入公式(3)并求解方程组,得到不同激振频率下的动密封实验台机械阻抗系数h
bl,ij
。
[0055]
综上所述,本发明提供了一种动密封实验台机械振动特性试验识别方法,用优化得到的实际静子质量矩阵代替静子称量质量,修正了由于实验台制造、安装和运行过程中存在的质量不平衡或静态不对中问题产生的测量误差,能够准确识别动密封实验台机械阻抗系数,为准确测量动密封转子动力特性系数、深入开展动密封转子动力特性研究提供了可靠支撑。
[0056]
以上实施例仅用于说明本发明的技术方案,而不能理解为对本发明的限制。尽管上述实施例对本发明进行了详细的说明,本领域普通技术人员依然可以对本发明的具体实施方式进行修改、替换或改进,这些在本发明的精神和原则范围内所做出的任何修改、替换或改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1