雷达系统中的收发器性能参数的测量的制作方法
雷达系统中的收发器性能参数的测量
1.本技术是国际申请日为2016年09月30日、进入国家阶段日为2018年02月06日的名称为“雷达系统中的收发器性能参数的测量”的中国专利申请201680046131.0(pct/us2016/054921)的分案申请。
技术领域
2.本技术大体上涉及雷达系统,并且更具体地涉及雷达系统中的收发器性能参数的测量。
背景技术:
3.被称为高级驾驶员辅助系统(adas)的新一类安全系统已被引入到汽车中以减少人为操作错误。由主要基于毫米波汽车雷达的智能传感器启用这些系统。部分通过微控制器和传感器技术的改进已启用这些辅助系统的增殖/扩散(proliferation),这些辅助系统的增殖可提供诸如后视摄像头、电子稳定控制和基于视觉的行人检测系统的功能。增强型嵌入式基于雷达的解决方案为adas设计人员启用互补的安全特征。
4.在汽车雷达系统中,雷达传感器用于检测车辆周围的障碍物和检测到的物体相对于车辆的速度。雷达系统中的处理单元可基于由雷达传感器生成的信号确定例如避免碰撞或减少附带损害所需的适当动作。当前的汽车雷达系统能够检测车辆周围的物体和障碍物、任何检测到的物体和障碍物相对于车辆的位置以及任何检测到的物体和障碍物相对于车辆的速度。例如,经由处理单元,雷达系统可警告车辆驾驶员潜在的危险、通过在危险情况下控制车辆来防止碰撞、接管车辆的部分控制或协助驾驶员停放车辆。
5.要求汽车雷达系统符合国际标准26262标题为“road vehicles-functional safety(道路车辆-功能安全)”的功能安全规范。iso 26262将功能安全定义为不存在由电气/电子系统的故障行为引起的不合理风险。汽车雷达的功能安全是防止由于雷达中的组件故障对人体造成伤害。对于汽车雷达,应该知道雷达在大约100毫秒(ms)的容错时间间隔内适当起作用。由此,在车辆操作的同时,应该检测将导致信噪比(snr)降低的雷达的任何部分中的故障或障碍物的存在或位置的错误检测,并且在大约100毫秒内执行适当的响应。
技术实现要素:
6.在描述的用于测量雷达系统中的收发器性能参数的方法和装置的示例中,经配置用于监测一个或更多个性能参数的雷达片上系统(soc)包括一个或更多个接收通道、一个或更多个发送通道、耦合到一个或更多个发送通道的发送生成电路系统以及将一个或更多个发送通道耦合到一个或更多个接收通道的环回路径,发送生成电路系统可操作以当雷达soc在测试模式下操作时产生连续波信号,环回路径包括耦合到一个或更多个发送通道的合路器(combiner)、耦合到一个或更多个通道的分路器(splitter)以及将合路器的输出端耦合到分路器的输入端的单导线,环回路径可操作以当雷达soc在测试模式下操作时,将来自接收连续波信号的至少一个发送通道的测试信号提供给至少一个接收通道。
102的接收通道和/或发送通道的测试数据,并且将测试数据提供给处理单元104以用于监测接收通道和/或发送通道的性能参数。
17.处理单元104包括执行雷达信号处理的功能,即处理接收的雷达信号以确定例如任何检测到的物体的距离、速度和角度。处理单元104还可包括对关于检测到的物体的信息执行后处理的功能(如跟踪对象、确定移动的速率和方向等)。进一步,处理单元104包括基于由雷达soc 102提供的测试数据执行性能监测和基于由性能监测检测到的状况执行缓解的功能。本文中更详细地描述了用于性能监测的测试数据和选项。
18.处理单元104可包括根据使用雷达数据处理应用的吞吐量所需的任何合适的处理器或处理器的组合。例如,处理单元104可包括数字信号处理器(dsp)、微控制器(mcu)、结合dsp和mcu处理两者的soc或现场可编程门阵列(fpga)和dsp。
19.处理单元104经由网络接口106根据需要向车辆中的一个或更多个电子控制单元提供控制信息。电子控制单元(ecu)是车辆中的任何嵌入式系统的通用术语,其控制车辆中的一个或更多个电气系统或子系统。ecu的示例类型包括电子/引擎控制模块(ecm)、动力传动系控制模块(pcm)、变速箱/器控制模块(tcm)、制动控制模块(bcm或ebcm)、中央控制模块(ccm)、中央计时/定时模块(ctm)、通用电子模块(gem)、车身控制模块(bcm)和悬架控制模块(scm)。
20.网络接口106可实施任何合适的协议,如控制器区域网络(can)协议、flexray协议或以太网协议。
21.图2是示例雷达soc 102的框图。雷达soc 102可包括用于发送fmcw信号的多个发送通道204和用于接收反射的发送的信号的多个接收通道202。进一步,接收通道的数量可大于发送通道的数量。例如,雷达soc 102的实施例可具有两个发送通道和四个接收通道。
22.发送通道包括合适的发送器和天线。接收通道包括合适的接收器和天线。进一步,接收通道202中的每个是相同的,并且包括用于放大接收的信号的低噪声放大器(lna)206、208,用于将由发送生成电路系统生成的信号与接收的信号混合以生成if信号的混频器210、212,用于对if信号进行滤波的基带带通滤波器214、216,用于放大滤波后的if信号的可变增益放大器(vga)215、217,以及用于将模拟if信号转换为数字if信号的模数转换器(adc)218、220。混频器用作生成输出信号的降频转换器,该输出信号的频率等于从低噪声放大器和发送生成电路系统接收的输入的频率之间的差,这两个者都是射频(rf)信号。接收通道的带通滤波器、vga和adc可被统称为基带链或基带滤波器链。进一步,带通滤波器和vga可被统称为if放大器(ifa)。
23.接收通道202耦合到数字前端(dfe)组件222以将数字if信号提供给dfe 222。dfe 222包括对数字if信号执行抽取(decimation)滤波以降低数据传输速率的功能。dfe 222还可对数字if信号执行其他操作,例如,dc偏移消除、接收通道中的非理想性的数字补偿(如rx间增益不平衡非理想性和rx间相位不平衡非理想性)。当雷达soc 102处于正常模式时,dfe 222耦合到高速串行接口(i/f)224以将抽取的数字if信号传输到处理单元106。在一些实施例中,当雷达soc 102处于测试模式时,dfe还耦合到控制模块228以将数字测试信号传输到控制模块228。
24.串行外围接口(spi)226提供用于与处理单元106通信的接口。例如,处理单元106可使用spi 226向控制模块228发送控制信息,例如,啁啾的计时和频率、输出功率水平、触
发监测功能等。例如,雷达soc 102可使用spi226将测试数据发送到处理单元106。
25.控制模块228包括在正常模式和测试模式下控制雷达soc 102的操作的功能。例如,控制模块228可包括用于存储dfe 222的输出采样的缓冲器、用于计算缓冲器内容的光谱信息的fft(快速傅里叶变换)引擎以及执行固件以控制雷达soc 102在正常模式和测试模式下操作的mcu。参考图6-10的方法更详细地描述控制模块228的功能。
26.可编程计时引擎232包括用于从控制模块228接收雷达帧中的啁啾序列的啁啾参数值以及基于参数值生成控制帧中的啁啾的发送和接收的啁啾控制信号的功能。例如,啁啾参数由雷达系统架构定义,并且可包括用于指示要启用哪些发送器的发送器启用参数、啁啾频率开始值、啁啾频率斜率、啁啾持续时间、发送通道何时应发送和dfe输出端数字何时应被收集用于进一步的雷达处理的指示器等。这些参数中的一个或更多个可以是可编程的。
27.射频合成器(synth)230包括基于来自计时引擎232的啁啾控制信号生成用于发送的fmcw信号的功能。在一些实施例中,synth 230包括具有压控振荡器(vco)的锁相环(pll)。
28.时钟乘法器240将发送信号(lo信号)的频率增加到混频器206、208的lo频率。清除pll(锁相环)234操作以将外部低频参考时钟(未示出)的信号频率增加到synth 230的频率,并且将参考时钟相位噪声从时钟信号中滤出。
29.时钟乘法器240、合成器230、计时发生器232和清除pll 234是发送生成电路系统的示例。发送生成电路系统生成射频(rf)信号,经由时钟乘法器,该信号作为输入到发送通道以及作为输入到接收通道中的混频器。发送生成电路系统的输出可被称为lo(本地振荡器)信号或fmcw信号。
30.图3、图4和图5是图2中的雷达soc 102的示例实施例的简化框图,其中雷达soc 102被配置以测量接收器和/或发送器的性能参数。为了简化解释,描述的实施例均具有四个接收通道和两个发送通道。在一些实施例中,接收通道的数量和/或发送通道的数量可以不同。在这些方法中,当雷达soc在测试模式下操作时,发送生成电路系统被配置以生成具有零斜率的连续波信号,即具有恒定频率的连续rf波的lo信号。当雷达soc在正常模式下操作时,发送生成电路系统的输出是随时间改变频率的rf信号,例如,响应于啁啾控制参数,rf信号的频率在0到100us的时间从77ghz改变到81ghz,导致反射的信号作为发送的信号的延迟版本,并且每个接收通道中的混频器输出与往返行程延迟成比例的if信号。
31.图3、图4和图5中的每个框图包括至少一个合路器。通常,合路器可以是添加输入信号以形成输出信号的硬件电路。如果合路器接收到单个输入信号,则该信号由合路器输出。在一些实施例中,合路器可以在添加信号之前将可编程增益或衰减应用于每个输入信号。在一些实施例中,合路器可以是对称的,使得到合路器输出端的每个输入信号的增益、衰减和/或延迟是相当类似的。
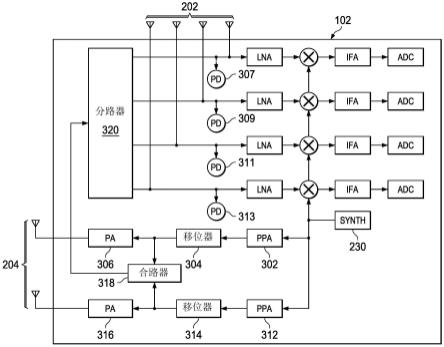
32.现在参考图3,描述的示例fmcw雷达soc 102被配置以当soc 102在测试模式下操作时将在发送通道204中生成的信号的内部环回提供给接收通道202中的每个。如参考图6的方法更详细地解释,这种配置用于以不同的射频和中频确定接收通道间增益和相位失配。如参考图7的方法更详细地解释,该配置用于确定接收通道202的噪声系数。而且,如参考图10的方法更详细地解释,该配置用于确定接收通道202中的非线性度量(metric)。
33.两个发送通道均包含耦合到synth 230以接收fmcw信号的功率预放大器(pre-power amplifier,ppa)302、312的信号功率放大器链,耦合到ppa302、312以接收放大的信号的可编程移位器304、314以及耦合到移位器304、314以接收移位的信号的功率放大器(pa)306、316。在一些实施例中,移位器304、314可被编程用于频移和相移两者。因此,移位器304、314的输出信号可具有等于输入频率加可编程偏移频率的频率和等于输入相位加可编程偏移相位的相位。合路器318被耦合到移位器304、314的输出端以接收和组合移位的信号。合路器318还被耦合到分路器320以将组合信号提供给分路器。
34.分路器320被耦合到接收通道202中的每个。分路器320拆分来自合路器318的组合信号以向接收通道202中的每个提供相等功率和相位的信号。分路器320可以是对称的,使得从分路器输入端到接收通道202中的每个的lna的信号的增益、衰减和/或延迟是相当类似的。
35.每个接收通道202包括耦合在分路器320与低噪声放大器(lna)之间的射频(rf)功率检测器307、309、311、313。功率检测器307、309、311、313测量来自合路器308的组合信号的功率。该功率测量也可被称为接收信号强度指示(rssi)。功率检测器307、309、311、313耦合到控制模块228以将功率测量提供给控制模块228。在一些实施例中,功率检测器307、309、311、313的每个可包含功率检测传感器和模数转换器,以将来自传感器的功率测量转换为数字功率测量。如本文中更详细地解释,当雷达soc在测试模式下操作时,功率检测器307、309、311、313的输出(功率测量)可被控制模块228访问。
36.现在参考图4,描述的示例fmcw雷达soc被配置以当soc 102在测试模式下操作时将在发送通道204中生成的信号的内部环回提供给接收通道202中的每个。如参考图8的方法更详细地解释,该配置用于确定发送通道204之间的功率和相位失配。
37.在这个示例中,合路器402被耦合到发送通道204的功率放大器链中的每个以接收来自功率放大器链的信号并且组合两个信号以生成单个信号。合路器402可以是对称的,使得从每个发送通道到合路器输出端的信号的增益和/或延迟是相当类似的。
38.合路器402还被耦合到移频器404以将组合信号提供给移频器404。例如,移频器404可以是开关键控(ook)调制器或二进制相移键控(bpsk)调制器。ook调制器的一个示例是通过交替地输出输入信号0.5/f shift的持续时间和零0.5/f shift的持续时间而在输入信号中实现频移fshift的电路。bpsk调制器的一个示例是通过交替地输出具有一种极性的输入信号0.5/f shift的持续时间并且输出具有相反极性的输入信号0.5/f shift的持续时间而在输入信号中实现频移fshift的电路。移频器404被耦合到分路器320以将频移的组合信号提供到分路器320。
39.每个发送通道204包括耦合到pa 306、316输出端的射频(rf)功率检测器407、417。每个功率检测器407、417测量从相应pa 306、316输出的信号的功率。功率检测器407、417被耦合到控制模块228以将功率测量提供给控制模块228。在一些实施例中,功率检测器407、417的每个可包含功率检测传感器和模数转换器,以将来自传感器的功率测量转换成数字功率测量。如本文中更详细地解释,当雷达soc在测试模式下操作时,功率检测器407、417的输出(功率测量)可被控制模块228访问。
40.现在参考图5,描述的示例fmcw雷达soc是图3的示例与图4的示例的组合,并且由此,当soc 102在测试模式下操作时,可执行本文中描述的任何方法。环回(lb)合路器502被
添加。lb合路器502被耦合在移频器404与分路器240之间,以接收来自发送通道204的功率放大器链的组合信号。lb合路器502还被耦合在合路器318与分路器240之间以接收从合路器318输出的信号。
41.图6-10是用于确定当soc 102在测试模式下操作并被适当配置时的雷达soc 102的各种性能参数的方法的流程图。这些方法可在控制模块228的控制下执行。因此,控制模块228可根据需要配置(一个或更多个)环回路径和其他组件以执行期望的测量。进一步,在这些方法中,将由控制模块228确定的测试结果即性能参数值报告给安全处理器。
42.通常,安全处理器接收性能参数值并且基于参数值执行一个或更多个动作。例如,安全处理器可将参数值与预定阈值进行比较,并且如果阈值被跨越则通知受影响的实体。在另一个示例中,参数值中的一个或更多个可引起从雷达接收的关于检测到的物体的存在、位置和速度的数据的修改。在下面的方法说明中,为了简化说明,安全处理器被假定为处理单元104。
43.图6是用于确定雷达soc 102的接收通道202之间的增益和相位失配的方法的流程图。可在图3的示例实施例和图5的示例实施例中执行该方法。可以以射频和中频的任何组合执行该方法。例如,对于77-81ghz雷达,射频(rf)可以是77、79或81ghz而用于性能监测的典型中频(if)可以是15、10、5、2、1、0.5或0.1mhz。在以下说明中,使用rf=80ghz,以及if=1mhz作为示例。
44.如图6中所示,由控制模块228启用600从发送通道204中的一个到接收通道202的环回路径。在图3的示例soc 102中,环回路径包括选择的发送通道的ppa和移位器、合路器318和分路器320。在图5的示例soc 102中,环回路径还包括lb合路器502。进一步,通过pa、合路器402和移频器404的另一个环回路径未被启用。
45.控制模块228进一步致使生成602从选择的发送通道通过环回路径的连续波(cw)测试信号(例如,80ghz+1mhz)。可通过将来自synth 230的本地振荡器(lo)信号的频率设置为80ghz并且对功率放大器链中的移位器进行编程以将1mhz的频率添加到lo信号来生成cw测试信号。
46.测试信号通过分路器320到接收通道202中的每个,并且控制模块228从接收通道中的每个收集604数字测试数据信号。在一些实施例中,控制模块228收集来自每个接收通道202中的adc的输出端的信号。在其他实施例中,控制模块228收集来自dfe 222的输出端的信号。同时地且同步地执行来自接收通道202的数据收集,即,来自四个接收通道202的数据收集同时被启动。
47.控制模块228对测试数据信号执行快速傅立叶变换(fft),并且确定606同时地且同步地在四个接收通道202中的每个中接收的测试数据信号的振幅ai和相位θi(i=1...4)。在接收通道中接收的测试信号的振幅ai和相位θi可被确定如下。假定为了便于解释,以采样率fs(例如,ns=1024且fs=10.24mhz)收集adc数据的ns个采样,并且执行ns点fft以产生被称为fftout[0,1,2,...n
s-1]的ns fft输出复采样。收集dfe输出的周期可被编程为ns/fs,并且啁啾持续时间可等于或稍微超过ns/fs。对应于频率if的测试数据信号的fft输出采样指数indx由if/fs*ns给出。fftout[indx]的值是复数,由x+jy表示。这个数的振幅由a=sqrt(x2+y2)/ns给出,并且相位由θ=arctan(y/x)给出。控制模块228还从对应接收通道202的功率检测器307、309、311、313中的每个接收608功率数据pi。
[0048]
控制模块228然后计算610以下性能参数:每个接收通道的增益、接收通道之间的增益失配和接收通道之间的相位失配。这些参数值被报告612给安全处理器104。接收通道i的增益可被计算为
[0049]
gaini=20loga
i-ρi。
[0050]
如果环回路径被对称地设计为跨越接收通道,则可在不使用功率数据的情况下计算增益,即,
[0051]
gaini=20logai。
[0052]
为了简化和易于解释,在上述增益计算方程的右侧没有显示一些常数附加项。这些常数项对于无线电设计人员是常识并且是已知的。例如,可存在更多的附加常数项用于匹配p和a的单位。例如,a的值指示接收通道中的adc处的信号电平(“多少个lsb”),而p的值指示在接收通道lna的输入端处检测到的功率值(“dbmilliwatt(分贝毫瓦特)”或“dbwatt(分贝瓦特)”)。为了匹配a和p的单位,可将诸如的常数添加到以上方程以达到这样的目的,其中adcfullscale是adc满量程电压(如1伏特),numbits是每个adc输出字中的位的数量,以及resistance可以是例如典型的50欧姆电阻。可存在其他类似的设计常数,以针对无线电设计者所知的其他标准概念进行标准化。
[0053]
两个接收通道i和j之间的增益失配可被计算为
[0054]
gainmismatch
i,j
=gain
i-gainj。
[0055]
两个接收通道i和j之间的相位失配可被计算为
[0056]
phasemismatch
i,j
=θ
i-θj。
[0057]
上述方法用于在各种射频和中频处发现增益、增益失配和相位失配。例如,该方法用于以rf=77ghz、79ghz、81ghz中的每个计算这些参数,所有if被设置为例如1mhz。这有助于确定增益和相位是否在期望的射频范围内的多个接收通道之间很好地匹配。在另一个示例中,该方法用于以if=1mhz、5mhz、10mhz中的每个计算这些参数,所有rf被设置为例如79ghz。这有助于确定增益和相位是否在期望的中频范围内的多个接收通道之间很好地匹配。
[0058]
图7是用于确定雷达soc 102的接收通道202中噪声系数的方法的流程图。该方法可在图3的示例实施例和图5的示例实施例中执行。初始,如参考图6的方法描述的,确定700接收通道中的每个的增益。控制模块228然后禁用702从选择的发送通道的环回路径,使得没有来自发送通道的信号可到达接收通道,由此确保只有噪声信号到达接收通道。
[0059]
控制模块228然后从接收通道中的每个收集704数字噪声数据几微秒,并且基于对应噪声数据计算706每个接收通道的噪声功率。在一些实施例中,控制模块228从每个接收通道202中的adc的输出端收集噪声数据信号。在其他实施例中,控制模块228从dfe 222的输出端收集噪声数据信号。
[0060]
可通过对相应噪声数据执行fft并对fft输出的平方幅度进行求和来计算接收通道i的噪声功率。例如,接收通道i的噪声功率可被计算如下。假定为了便于解释,以采样率fs(例如,ns=1024和fs=10.24mhz)收集adc数据的ns个采样,并且执行ns点fft以产生被称为fftout[0,1,2,...n
s-1]的ns fft输出复采样。fft输出采样指数范围从indxmin开始到indxmax,对应于用于雷达信号处理的感兴趣的if带宽,由indexmin=0,indexmax=
ifbandwidth/fs*ns给出。fftout[indxmin到indxmax]的值是复数,由x[indx]+jy[indx]表示,其中indx=indxmin到indxmax是相关的。噪声功率可被计算为:
[0061][0062]
ifbandwidth的典型值是5mhz或10mhz,并且取决于精确的雷达频率规划、扫描的最大目标距离、fmcw频率斜率等。应选择fs的值高于ifbandwidth。
[0063]
控制模块228然后计算708每个接收通道的噪声功率的噪声功率谱密度(psd)。接收通道i的噪声psd可被计算为:
[0064]
noisepsdi=10*log10(noisepoweri/ifbandwidth)
[0065]
其中ifbandwidth是中频(if)的带宽。最后,控制模块228基于对应噪声psd计算710每个接收通道的噪声系数(nf),并且将噪声系数报告712给安全处理器。接收通道i的噪声系数nfi可被计算为:
[0066]
nfi=noisepsd
i-gaini。
[0067]
在测试模式下,如在图6、图7和图9的方法中使用的移位器304和314对lo信号提供频移if以生成测试信号作为至接收通道的具有来自lo rf频率的if的频率偏移的输入。没有这种频移,测试信号的频率将与接收通道中的混频器处的lo频率的相同,由此引起ifa输入处的测试信号基本上接近0hz。用于雷达soc的典型ifa电路和adc接近0hz具有差的性能(即高噪声)但是在更高频率下(例如,几mhz)具有好得多的性能,即更低的噪声。在典型ifa和adc电路中,ifa和adc中接近0hz的噪声(其可被称为闪烁噪声)在更高频率下的影响可忽略不计。
[0068]
而且,雷达ifa电路通常包括高通滤波器(hpf)和低通滤波器或有效带通滤波器。ifa中的hpf衰减非常低的if频率,如0hz,以及小于500khz。由此,如果测试信号具有这种低的频率,则adc输入端和输出端包含振幅非常低的测试信号和在类似/接近于频率处非常高量的噪声,破坏测试信号。adc输出端的测试信号的低振幅和测试信号的if频率附近的高噪声功率可引起上述性能参数测量不切实际且测量精度低。使用移位器304、314来移位lo信号的频率确保通过ifa的测试信号具有显著高于0hz的频率if。因此,adc输入端和输出端包含显著振幅的测试信号和类似/接近于频率的相对较低的噪声功率。
[0069]
在图10的方法中,移位器304和314还能够生成由不同非零if频率的多个音组成的多音(multiple tone)测试信号。
[0070]
图8是用于确定雷达soc 102的发送通道204之间的功率和相位失配的方法的流程图。可在图4的示例实施例和图5的示例实施例中执行该方法。可在任何合适的射频下执行该方法。例如,对于77-81ghz雷达,射频(rf)可以为77、79或81ghz。在下面的描述中使用rf=80ghz作为示例。
[0071]
如图8中所示,由控制模块228启用800从发送通道204中的一个到接收通道202的环回路径。在图4的示例soc 102中,环回路径包括选择的发送通道的ppa、移位器和pa(即,功率放大器链)、合路器402、移频器404和分路器320。在图5的示例soc 102中,环回路径还包括lb合路器502。进一步,通过合路器318的环回路径不被启用。在这两个实施例中,另一个发送通道不被启用。
[0072]
控制模块228进一步致使生成802从选择的发送通道通过环回路径的连续波(cw)
测试信号(例如,80ghz)。可通过将来自synth 230的本地振荡器(lo)信号的频率设置为80ghz并且对选择的发送通道的功率放大器链中的移位器进行编程以将0mhz的频率添加到lo信号来生成cw测试信号。控制模块228还配置803移频器404以将测试信号移位中频(if),例如1mhz。
[0073]
频移测试信号通过分路器320至接收通道202,并且控制模块228从一个接收通道收集804数字测试数据信号。可为数据收集选择接收通道中的任何一个。在一些实施例中,控制模块228从接收通道中的adc的输出端收集测试信号。在其他实施例中,控制模块228从dfe 222的输出端收集测试信号。同时地且同步地执行数据收集与移频器404的操作,即,数据收集被启动,同时,移频器404在测试信号中引起期望的频移,并且持续几微秒。
[0074]
控制模块228对测试数据信号执行快速傅立叶变换(fft),并且确定806接收的测试数据信号的振幅ai和相位θi(i=1...2)。上文中描述了振幅和相位的确定。在这个过程中,ai和θi是以给定的rf频率的发送通道i和选择的接收通道的组合的振幅和相位响应。控制模块228还从发送通道中的功率检测器接收808功率数据pi。然后重复809数据收集过程800-808用于另一个发送通道。
[0075]
控制模块228然后计算810以下性能参数:发送通道之间的功率失配和发送通道之间的相位失配。向安全处理器104报告812这些参数值和每个发送通道的功率。两个发送通道i和j之间的相位失配可被计算为
[0076]
phasemismatch
i,j
=θ
i-θj。
[0077]
两个发送通道i和j之间的功率失配可被计算为
[0078]
powermismatch
i,j
=p
i-pj。
[0079]
可替代地,两个发送通道i和j之间的功率失配可被计算为
[0080]
powermismatch
i,j
=a
i-aj[0081]
如果包括合路器的路径和通向选择的接收通道输入端的路径跨越发送通道匹配。在这种情况下,测量的adc输出振幅只表示各种pa输出端处的发送器功率失配。与其他功率失配方程相比,该方程消除了来自功率检测器电路的功率测量中的任何误差。
[0082]
在图8的方法中在测试模式下使用的移频器404用于与上文中描述的移位器304、314的类似的目的。因此,在没有移频器404执行频移的情况下,接收通道输入端处的测试信号将接近0hz,其将被ifa和adc中的闪烁噪声破坏。进一步,测试信号将被接收通道的ifa的hpf衰减,并且对应于测试信号的adc输入和输出的振幅将是低的。adc输出端处的测试信号的低振幅和测试信号的if频率附近的高噪声功率可引起发送通道增益和相位失配的测量不切实际且测量精度低。
[0083]
进一步,发送通道中的pa之后的移频器404用于额外的目的。为了测量发送通道增益和相位失配,图8的方法启用发送通道中的pa,其引起lo信号的外部发射。外部发射的lo信号由雷达周围的物体(如雷达系统的底盘或安装雷达系统的车辆)反射。其也从发送通道天线电磁耦合到接收通道天线。由于全部反射和耦合而接收到接收通道的整个信号可被称为外部信号。外部信号的频率与lo信号的rf频率相同。在没有移频器404执行频移的情况下,在接收通道lna处接收的测试信号也具有与lo信号相同的频率。
[0084]
如果外部信号和测试信号具有相同的频率,则当处理adc输出时无法区分两者。由此,来自测试信号的发送通道增益和相位失配等的测量将由于外部信号而被破坏,并且测
量将是错误的。通过在测试信号传递到接收通道lna之前在pa输出信号上施予频移,移频器404确保外部信号的频率和lna输入端处的测试信号的频率,并且因此它们在adc输出端处是不同的。通过执行fft或等同的数字信号处理,给定adc输出端处的两个信号的频率差异,上述方法可精确地估计来自测试信号的发送通道增益和相位失配,且没有估计被外部信号破坏。外部信号将对应于fft输入端处的0hz信号,并因此对应于fft指数0,而测试信号将对应于如上解释的频率if和fft指数。
[0085]
图9是用于确定雷达soc 102的发送通道和接收通道的每个组合的雷达系统噪声系数的方法的流程图。可在图3的示例实施例和图5的示例实施例中执行该方法。在该方法中,代替使用环回路径来测量该参数,测试信号由发送通道发送,并且接收通道202接收测试信号,如从附近的静态物体(如安装雷达系统的车辆的底盘,或雷达系统的底盘)反射的。雷达系统噪声系数是破坏接收的反射的信号的平均噪声功率。噪声源是测量雷达系统噪声系数时使用的接收通道和发送通道两者。当接收通道噪声直接添加到期望的物体反射的输入信号时,发送通道噪声主要通过从发送天线到接收天线的电磁耦合以及通过来自附近静态物体的强反射来破坏输入信号。
[0086]
初始,如参考图6的方法描述的,确定900接收通道中的每个的增益。控制模块228然后禁用902来自选择的发送通道的环回路径,使得没有来自发送通道的信号能通过该路径到达接收通道。进一步,另一个发送通道不被启用。控制模块228进一步致使生成903由选择的发送通道发送的连续波(cw)测试信号(例如rf=80ghz)。可通过将来自synth 230的本地振荡器(lo)信号的频率设置为80ghz并且对选择的发送通道的功率放大器链中的移位器进行编程以将0mhz的频率添加到lo信号来生成cw测试信号。
[0087]
接收通道202接收从附近的静态物体反射的测试信号。控制模块228从接收通道中的每个收集904数字噪声数据几微秒,并且基于相应噪声数据计算906每个接收通道的噪声功率。在一些实施例中,控制模块228从每个接收通道202中的adc的输出端收集噪声数据信号。在其他实施例中,控制模块228收集来自dfe 222的输出端的噪声数据信号。计算上文描述的接收通道i的噪声功率。
[0088]
控制模块228然后计算908每个接收通道的噪声功率的噪声功率谱密度(psd)。计算的噪声功率包括由选择的发送通道和接收通道引入的噪声。接收通道i的噪声psd可被计算为
[0089]
noisepsdi=10*log10(noisepoweri/ifbandwidth)
[0090]
其中ifbandwidth是中频(if)的带宽。控制模块228然后基于相应噪声psd计算910每个接收通道的雷达系统噪声系数(rsnf)。接收通道i的雷达系统噪声系数rsnfi可被计算为
[0091]
rsnfi=noisepsd
i-gaini。
[0092]
然后重复911雷达系统噪声系数计算902-910用于另一个发送通道。最后,控制模块228向安全处理器报告912计算出的每个接收通道/发送通道对的雷达系统噪声指数。
[0093]
在上述方法中,在adc采样的收集期间使用的rf频率基本上是恒定的,即不像在正常的fmcw雷达操作中那样斜升。由此,与来自各种距离处的物体的反射相对应的接收信号全部具有基本上相同的频率,即与上面提到的“rf”相同。在典型的fmcw雷达中的正常操作期间,发送信号的频率斜率为非零的,并且与来自各种距离处的周围物体的反射对应的接
收信号的频率等于rf加与物体距离成比例的频率。adc输出的fft中测量的功率除了雷达系统噪声之外包括反射的信号的功率,这使得难以区分雷达系统噪声和反射的信号的功率。在上面的方法中,使用具有零斜率的恒定rf引起来自各种距离处的物体的反射以相同的rf频率发生。此外,对应信号被接收通道中的高通滤波器高度衰减,并且测量的adc的输出的功率与雷达系统噪声的功率紧密匹配。
[0094]
图10是用于确定雷达soc 102的接收通道的非线性度量的方法的流程图。可在图3的示例实施例和图5的示例实施例中执行该方法。可以以任何合适的rf和if1和if2频率执行该方法。例如,对于77-81ghz雷达,rf可以是77、79或81ghz,并且if1和if2频率可以是if1=2mhz,if2=2.5mhz。在该方法的描述中,rf=80ghz,if1=2mhz,if2=2.5mhz用于示例目的。在一些实施例中,选择if1和if2频率值,使得m*if1+n*if2,其中m是+/-1、+/-2、+/-3...中的一个或更多个,并且n是+/-1、+/-2、+/-3...中的一个或更多个,并且m和n不是if1或if2的整数倍。
[0095]
理想的接收通道在adc输出端生成信号,这个信号仅仅是接收信号的缩放版本。因此,如果lna输入信号是x,则adc输出信号是k*x,其中频率从rf向下移位到if。这种理想的接收通道可被称为线性接收通道。非理想的(即非线性)接收通道在adc输出端生成k*x+k2*x2+k3x3+...。fmcw雷达系统中的这种非线性的影响是,代替检测对应于k*x项的实际物体反射,fmcw雷达信号处理器被骗(fool into)错误地将缺少的物体检测为存在于对应于k2*x2和k3*x3的距离处。进一步,在存在多次反射的情况下,线性接收通道在adc输出端生成k*x1+k*x2。但是,非线性接收通道生成附加项,如引起fmcw雷达信号处理器错误地将缺少的物体检测为存在于在对应距离处的k
31
*x
13
*x
22
。该方法确定非线性度量,安全处理器可将该非线性度量与阈值进行比较以检测接收通道中的破坏/故障。
[0096]
所呈现的方法处理计算单个接收通道的非线性度量。可以重复该方法以计算其他接收通道的非线性度量。替换地,在一些实施例中,基于双音测试信号的单个发送计算所有接收通道的非线性度量,即,从接收通道中的每个收集双音测试数据信号,并且针对每个接收通道计算非线性度量。
[0097]
如图10中显示的,控制模块228初始地配置1000从发送通道204到接收通道202的测试路径(环回路径)。在图3的示例soc 102中,发送通道的环回路径包括发送通道的ppa和移位器、合路器318和分路器320。在图5的示例soc 102中,环回路径还包括lb合路器502。进一步,控制模块228引起一个发送通道的移位器频移if1频率,并且另一个发送通道的移位器频移if2频率。
[0098]
控制模块228还致使生成1002通过从发送通道到接收通道202的启用的测试路径的80ghz的双音连续波(cw)测试信号。可通过将来自synth 230的本地振荡器(lo)信号的频率设置为80ghz来生成双音cw测试信号。被编程以频移if1频率的移位器将传播80ghz+if1的信号,并且被编程以频移if2的移位器将传播80ghz+if2的信号,由此在选择的接收通道的lna输入端提供双音测试信号。
[0099]
控制模块228然后收集来自接收通道中的一个的数字双音测试数据信号。在一些实施例中,控制模块228从接收通道中的adc的输出端收集测试信号。在其他实施例中,控制模块228从dfe 222的输出端收集测试信号。
[0100]
控制模块228然后基于接收的双音测试数据信号计算1006接收通道的非线性度
量。为了计算非线性度量,控制模块执行测试数据信号的fft,并且计算在以下频率处的fft输出中的两个音的幅度m1、m2、mmn:if1、if2、m*if1+n*if2,其中m是+/-1、+/-2、+/-3...中的一个或更多个,并且n是一个或更多个+/-1、+/-2、+/-3...。可如下执行该fft。假定为了便于解释,以采样率fs(例如,ns=1024和fs=10.24mhz)收集adc数据的ns个采样,并且执行ns点fft以产生被称为fftout[0,1,2,...n
s-1]的ns个fft输出复采样。对应于频率{if1,if2,m*if1+n*if2}的fft输出采样指数{indx1,indx2,indxmn}由{if1/fs*ns,if2/fs*ns,(m*if1+n*if2)/fs*ns}给出。fftout[indxi]的值是复数,由(x+jy)表示。该数的幅度m由m=sqrt(x2+y2)/ns给出。由此,可找到对应于相应指数indx1、indx2、indxmn的m1、m2和mmn的值。
[0101]
m1和m2对应于以频率rf+if1和rf+if2提供给接收通道的两个音x1和x2,并且mmn对应于由非线性接收通道产生的互调产物k
mn
*x
1m
*x
2n
。而且,m1和m2的值是显著的。进一步,在理想的接收器中,因为理想的接收通道不会引起互调产物,所以mmn的值接近于0。但是,在非线性接收通道中,mmn的值可能不是0,并且可能比m1和m2低几个数量级。mmn的值越低指示接收通道的性能越好。
[0102]
给定m1、m2和mmn,控制模块228计算m1_db=20*log10(m1)、m2_db=20*log10(m2)和mmn_db=20*log10(mmn)以将这些值转换为分贝。使用得到的转换值,控制模块228计算非线性度量(nm)的值,并将这些度量值报告1008给安全处理器。可被计算的两个非线性度量的示例如下:
[0103]
nmi=m1_db+0.5*m2_db-0.5*m12_db
[0104]
nm2=m1_db+m2_db-m11_db。
[0105]
其他非线性度量可类似地被计算为m1_db、m2_db、mmn_db的加权和或者m1、m2、mmn的乘积。如果mmn的值显著低于m1和m2的值,则nmi的低值指示接收通道中的互调产物为高,因为nmi的值为高。
[0106]
从两个不同的发送通道生成两个音x1和x2允许由接收通道(其对组合信号k1*x1+k2*x2进行操作)产生的互调产物与由单独的发送通道(其中的每个仅对两个信号x1和x2中的一个进行操作)中的非线性引起的任何附加音分开。由单独的发送通道中的非线性引起的附加音引起诸如xl2、xl3、xl4、...的附加项并且相应地针对在输入到接收通道的信号中的x2。该方法通过确保互调产物amn的频率与这些项的频率不一致来避免破坏这些项感兴趣的互调产物amn。
[0107]
为了简化解释,图10的方法假定两个发送通道和双音测试信号。该方法可扩展到使用两个以上的发送通道,其中,每个发送通道被编程以生成不同的频移,即if1、if2、if3、....。观察对应于多音的互调产物的fft指数以计算非线性度量。选择用于if1、if2、if3、...以减轻发送通道中的非线性的值应该使得if1、if2、if3、...的倍数与互调产物的频率不一致,其将是m*if1+n*if2+p*if3,其中m、n、p是整数0、+/-1、+/-2、...。
[0108]
在图10的方法的另一个实施例中,移位器304和314的输出端被配置以通过不同的路径到达接收通道的相应lna。例如,移位器304的输出可被配置以通过合路器318和lb合路器502(其中,pa 306被禁用)到达接收通道的lna,并且移位器314的输出可被配置以经由pa 316和对应天线被发送。后一信号通过来自外部物体(例如车辆或雷达底盘)的反射和/或从发送天线到接收天线的电磁耦合到达接收通道的lna。进一步,对移位器314的if频率进行
编程,类似于对应于在正常fmcw雷达操作期间观测到的来自外部物体的附近的强反射和/或电磁耦合的频率偏移,例如10khz,并且对移位器304的if频率进行编程,对应于中等反射强度和中等距离的物体,例如几mhz。
[0109]
在这个实施例中,通过外部天线路径的音具有比通过片内(intra-chip)环回路径可实现的高得多的振幅,并且可更好地模拟实际雷达操作期间的信号强度。进一步,在多个pa中的仅一个被启用的情况下,由发送电路和环回路径生成的任何不期望的互调产物的强度被降低,由此改善了由接收通道生成的互调产物的检测和估计。
[0110]
在图10的方法的另一个实施例中,移位器304和314的输出可被配置可被配置以经由相应pa和天线被发送。发送的信号通过来自外部物体(例如车辆或雷达底盘)的反射和/或从发送天线到接收天线的电磁耦合到达接收通道的lna。进一步,对移位器314的if频率进行编程,类似于对应于在正常fmcw雷达操作期间观测到的来自外部物体的附近的强反射和/或电磁耦合的频率偏移,例如10khz,并且对移位器304的if频率进行编程,对应于中等反射强度和中等距离的物体,例如几mhz。而且,pa 306的输出功率保持为高,使得由lna接收的反射信号的幅度类似于在正常fmcw雷达操作期间观测到的来自外部物体的附近的强反射和/或电磁耦合的幅度,并且pa 316的输出功率保持为高,使得到达lna的反射信号的幅度类似于中等反射强度和中等距离的物体的幅度。
[0111]
虽然已经关于有限数量的实施例描述了本公开,但是可在本公开的范围内设计其他实施例。
[0112]
例如,本文中已经描述了多个实施例,其中处理信号以确定参数值在雷达soc上的控制模块中被执行。在一些实施例中,例如由处理单元或由外部mcu在soc外部执行信号处理中的一些或全部。
[0113]
在另一个示例中,本文中已经描述了多个实施例,其中安全处理器在雷达soc外部。在一些实施例中,安全处理器是雷达soc的一部分,例如是soc上的控制处理器或另外的处理器。
[0114]
在另一个示例中,本文中已经描述了多个实施例,其中由synth输出的lo信号被提供给发送通道中的ppa和接收通道中的混频器。一些实施例使用lo配电网。通常,lo配电网是将lo信号传送到接收通道的混频器和发送通道的移位器的单元树。例如,单元可以是导线或放大器,如ppa或倍频器或分频器。
[0115]
在另一个示例中,使用时钟乘法器。在一些实施例中,不需要乘法器,因为synth以lo频率而不是较低频率操作。
[0116]
在另一个示例中,本文中已经描述了多个实施例,其中发送信号生成电路系统被假定为包括射频合成器。在一些实施例中,该电路系统包括开环振荡器(射频振荡器)加数模转换器(dac)或其他合适的发送信号生成电路系统。
[0117]
在另一个示例中,本文中已经描述了多个方法实施例,其中计算噪声功率谱密度(psd)。在一些实施例中,用于计算噪声psd的上面提到的方程的替代被用于计算噪声psd。可使用对应于频带的fft输出并且使用该频带的上限频率和下限频率的差作为上面提到的方程中的“ifbandwidth”来计算任何频带中的噪声psd。当预期噪声psd在不同的频带中不同时,这是有用的。
[0118]
在另一个示例中,本文中已经描述了多个方法实施例,其中接收通道i的噪声系数
nfi关于接收通道的增益被计算。在一些实施例中,不考虑接收通道中的增益确定噪声系数,即,
[0119]
nfi=noisepsdi。
[0120]
在另一个示例中,本文中已经描述了多个方法实施例,其中接收通道i的雷达系统噪声系数rsnfi关于接收通道的增益被计算。在一些实施例中,不考虑接收通道中的增益确定雷达系统噪声系数,即,
[0121]
rsnfi=noisepsdi。
[0122]
在另一个示例中,参考示例fmcw雷达soc在本文中已经描述了多个实施例。一些实施例用于其他类型的雷达,例如恒定频率、步进频率和三角频率雷达。
[0123]
在另一个示例中,雷达soc周期性地并且自动地在测试模式下操作以监测性能参数中的一个或更多个。在那些实施例中的一些中,雷达soc可在正常模式下操作固定的时间段以发送和接收啁啾的帧。在帧之间的时间段期间,雷达soc自动地在测试模式下操作以监测性能参数中的一个或更多个。例如,正常模式下的操作可发生100微秒,以及测试模式下的操作可发生80微秒,且每500微秒重复一次。在另一个示例中,持续时间可分别是5毫秒,3毫秒和40毫秒。
[0124]
在另一个示例中,本文中已经描述了假定存在多于一个发送通道的实施例。一些实施例具有单个发送通道或仅使用一个发送通道。在这种实施例中,合路器可以存在或可以不存在。如果合路器耦合到单个发送通道,则合路器的输出信号是合路器的输入信号。在这种实施例中,可计算一个或更多个性能参数,如接收通道增益、接收通道相位、接收通道间增益和相位失配、接收通道噪声系数和雷达系统噪声系数。
[0125]
在另一个示例中,本文中已经描述了假定存在多于一个接收通道的实施例。一些实施例具有单个接收通道或仅使用一个接收通道。在这种实施例中,分路器可以存在或可以不存在。如果分路器存在,则分路器输出端仅耦合到单个接收通道。在这种实施例中,可计算一个或更多个性能参数,如发送通道增益、发送通道相位,发送通道间增益和相位失配、接收通道噪声系数和雷达系统噪声系数。
[0126]
在另一个示例中,本文中已经描述了多个实施例,其中所有接收通道耦合到分路器并且所有发送通道耦合到至少一个合路器。在一些实施例中,接收通道的子集耦合到分路器和/或发送通道的子集耦合到至少一个合路器。在这种实施例中,可执行描述的方法中的以确定性能参数的一个或更多个。
[0127]
虽然可以以本文中的顺序方式呈现和描述方法步骤,但是可以同时执行、可以组合执行和/或可以以不同于附图中显示和/或本文中描述的顺序执行显示在附图中和本文中描述的步骤中的一个或更多个。因此,实施例不限于附图中显示的和/或本文中描述的步骤的特定顺序。
[0128]
在不偏离描述的功能的情况下,雷达系统中的组件可通过不同的名称被引用和/或可以以本文中未示出的方式组合。术语“耦合”及其派生词意在表示间接、直接,光学和/或无线电连接。例如,如果第一设备耦合到第二设备,则该连接可以通过直接电连接、通过经由其他设备和连接件的间接电连接、通过光学电连接和/或通过无线电连接。
[0129]
在描述的实施例中,修改是可能的,并且在权利要求的范围内,其他实施例是可能的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1