一种基于结构光的轨距动态测量方法与流程
1.本发明涉及轨道交通技术领域,具体涉及一种基于结构光的轨距动态测量方法。
背景技术:
2.随着城市公共交通运输需求的不断增大,近几年轨道交通作为主要的交通运输方式也正以飞快的速度向前发展。在世界上许多人口密集的大城市,包括中国的北京、上海、广州等一线城市,城市轨道交通在人们出行方式中都扮演着重要角色。但是,在城市轨道交通给人们带来便利的同时也影响了车辆、轨道系统的健康状态,例如:早高峰和晚高峰时段长期的过载运行会损坏地铁车辆的主要运行部件,并会快速恶化运营轨道的不平顺状态。我国地铁建设正处在建设和运营的高峰时段,至2020年,上海地铁将达到830公里,近期规划则达到1000公里;预计至2025年,北京地铁运营总里程将达到1600公里。从上面这些数字来看,地铁运营的安全问题应该越加受到重视。
3.轨道交通行业的快速发展对地铁车辆运行的钢轨不平顺状态提出了新的要求。目前,在地铁检修部门对地铁钢轨的检修工作中能够快速及时的监测钢轨的不平顺状态,对地铁车辆的安全运行及对运营线路的养护和维修具有决定性作用。
4.轨道几何形位指的是轨道各部分的几何形状、相对位置和基本尺寸,其基本的构成要素包括轨距、水平、高低、轨向和三角坑等。轨距为轨道不平顺的一个重要构成要素,指的是铁路钢轨轨面以下16mm范围内两股钢轨作用边之间的最小距离,轨距的偏差会导致列车发生堵塞或脱轨。轨距过大会导致列车发生脱轨事故,而轨距过小则会加速轨道与轮对之间的磨损,造成严重的交通事故和经济损失。因此,为了保证轨道列车安全、准确地测试,必须对测试线路的轨距进行精确检测,以保证列车稳定、安全运行。
5.目前,在基于视觉的非接触三维测量领域应用最广泛的方法是结构光系统,该系统通常由一个摄像机和一个由结构光的投影仪组成,其测量原理与立体视觉系统相似。但是,上述方法近仅是应用在车载钢轨磨损动态测量方面,对于轨距还没有相应的测量方法。
6.因此,提供一种可以对轨距进行高精度、动态检测的方法是目前亟需解决的问题。
技术实现要素:
7.为了克服上述问题,本发明人进行了锐意研究,设计出一种基于结构光的轨距动态测量方法,该方法利用轨距动态检测装置获取钢轨轮廓图像,通过对轮廓图像进行滤波、形态开运算、骨架提取获取清晰的钢轨轮廓曲线,同时,通过建立左右两侧摄像机之间空间姿态的非线性关系,依据轮廓曲线的特征提出定位钢轨轮廓曲线轨距点的方法,最后获得轨距的动态值。该方法保证了对轨距实时动态检测的高精度及鲁棒性,并保证了列车稳定、安地全运行,从而完成了本发明。
8.具体来说,本发明的目的在于提供一种基于结构光的轨距动态测量方法,所述方法包括以下步骤:
9.步骤1,获取钢轨轮廓图像;
10.步骤2,对获取的轮廓图像进行处理;
11.步骤3,获得轨距。
12.本发明所具有的有益效果包括:
13.(1)本发明提供的基于结构光的轨距动态测量方法,利用结构光及机器视觉的方法对测试线路的轨距进行检测,实现了精确、高效地非接触动态测量;
14.(2)本发明提供的基于结构光的轨距动态测量方法,能够快速寻找钢轨轮廓的特征点,显著提升了在线计算的速度以及检测系统运行时的抗干扰能力;
15.(3)本发明提供的基于结构光的轨距动态测量方法,保证了对轨距实时动态检测的高精度及鲁棒性,同时保证了列车稳定、安全运行。
附图说明
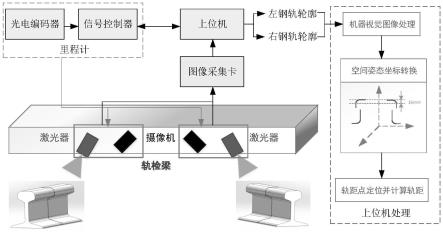
16.图1示出根据本发明一种优选实施方式的轨距动态检测方法的过程示意图;
17.图2示出根据本发明一种优选实施方式的钢轨轮廓图像处理的过程示意图;
18.图3示出根据本发明一种优选实施方式的钢轨轮廓图像的处理效果图;
19.图4示出根据本发明一种优选实施方式的左右两侧结构光视觉传感器标定示意图;
20.图5示出本发明实验例中的测量结果与误差的曲线图。
具体实施方式
21.下面通过附图和实施例对本发明进一步详细说明。通过这些说明,本发明的特点和优点将变得更为清楚明确。
22.在这里专用的词“示例性”意为“用作例子、实施例或说明性”。这里作为“示例性”所说明的任何实施例不必解释为优于或好于其它实施例。尽管在附图中示出了实施例的各种方面,但是除非特别指出,不必按比例绘制附图。
23.本发明结合结构光和机器视觉,提供了一种基于结构光的轨距动态测量方法,如图1所示,所述方法包括以下步骤:
24.步骤1,获取钢轨轮廓图像;
25.步骤2,对获取的轮廓图像进行处理;
26.步骤3,获得轨距。
27.以下进一步描述所述基于结构光的轨距动态测量方法:
28.步骤1,获取钢轨轮廓图像。
29.根据本发明一种优选的实施方式,通过轨距动态检测装置获取钢轨轮廓图像,如图1所示,
30.所述轨距动态检测装置包括结构光视觉传感器和高速图像采集系统。
31.在进一步优选的实施方式中,所述结构光视觉传感器具有两组,分别用于获取左钢轨的表面轮廓和右钢轨的表面轮廓,
32.优选地,所述结构光视觉传感器包括摄像机和激光器。
33.更优选地,所述摄像机为面阵相机,所述激光器为线激光器。
34.其中,每组结构光视觉传感器中优选包括一个面阵相机和一个线激光器。
35.在本发明中,所述面阵相机和线激光器为现有技术中常见的设备,不对其型号做特别限定。
36.在更进一步优选的实施方式中,所述面阵相机的摄像范围至少覆盖至轨面75%以下部分,
37.所述线激光器的照射范围覆盖至钢轨底面。
38.在本发明中,优选左右两侧结构光视觉传感器的面阵相机的摄像范围一致、线激光器的照射范围也一致,利用三角测量原理获取左右钢轨的表面轮廓。
39.优选地,本发明中所述的结构光视觉传感器安装于进行轨检的轨检车的轨检梁上,随着轨检车沿钢轨移动,结构光视觉传感器可连续测量获得待测钢轨的轮廓。
40.其中,左钢轨处的面阵相机与右钢轨处的面阵相机设置在同一平面内。
41.更优选地,所述面阵相机与线激光器同步工作。
42.根据本发明一种优选的实施方式,所述高速图像采集系统为高速图像采集卡。
43.其中,通过高速图像采集卡将面阵相机获得的钢轨图像进行传输。
44.根据本发明一种优选的实施方式,所述轨距动态检测装置还包括里程计,所述里程计包括光电编码器和信号控制器,
45.其中,光电编码器用于将车轴的转角转换为脉冲信号并传输给信号控制器,
46.信号控制器用于获取当前列车的行驶速度及控制面阵相机与线激光器同步工作。
47.优选地,所述光电编码器和信号控制器均设置在列车车轴上。
48.在本发明中,列车运行时,光电编码器将检测到的车轴的转角转换成脉冲信号并发送至信号控制器;信号控制器首先根据光电编码器产生的脉冲数获得当前列车的行驶速度,进而获得列车在一段时间后的位置。
49.具体地,信号控制器首先根据光电编码器产生的脉冲数n计算得到当前列车的行驶速度vi,如下式所述:
[0050][0051]
其中,d为车轮直径(m),δ为列车运行0.25s光电编码器产生的脉冲数。
[0052]
以某地点s0为列车的起始点,则列车在t时间后的位置如下式所述:
[0053][0054]
在进一步优选的实施方式中,所述信号控制器产生触发信号,控制面阵相机与线激光器同步工作。
[0055]
根据本发明一种优选的实施方式,所述轨距动态检测装置还包括上位机,以接收并存储高速图像采集系统传输的钢轨轮廓。
[0056]
其中,结构光视觉传感器获取的待测钢轨的轮廓,通过高速图像采集卡将面阵相机捕捉到的光条图像发送至上位机,以进行后续处理。
[0057]
在进一步优选的实施方式中,所述信号控制器与上位机为通讯连接。
[0058]
本发明所述的轨距动态检测装置,通过信号控制器控制摄像机和激光器同步工作,连续获得待测钢轨的轮廓,并通过高速图像采集卡将摄像机获得的左右钢轨的轮廓传输至上位机进行存储。
[0059]
步骤2,对获取的轮廓图像进行处理。
[0060]
在本发明中,获取并存储于上位机的钢轨轮廓图如下式所示:
[0061][0062]
其中,i,j分别表示行像素行和列的标号。
[0063]
优选地,如图2所示,步骤2包括以下子步骤:
[0064]
步骤2-1,对钢轨轮廓图像的背景进行过滤。
[0065]
根据本发明一种优选的实施方式,通过灰度化来过滤掉钢轨轮廓图像的大部分背景。
[0066]
其中,优选选取图像激光光带集中的[250-255]像素值范围进行滤波,即r分量图像作为原始灰度图像。
[0067]
其中,彩色是由rgb三个通道合成的,三个分量单独显示时,只有一个通道,此时图像显示不为彩色。
[0068]
在进一步优选的实施方式中,采用如下式所示的方法进行灰度化:
[0069]
h(x,y)=a*g(x,y)r[0070]
其中,h(x,y)表示灰度化后的钢轨轮廓数字化图像,a为系数,r为指数。
[0071]
在本发明中,为进一步提取光带的信息,优选采用exponential指数变换的灰度化方法对图像进行处理。
[0072]
步骤2-2,对钢轨轮廓图像的边缘进行处理。
[0073]
本发明人研究发现,进行灰度化后的轨道轮廓边缘仍然存在由于光的漫反射造成的散斑噪声,因此,优选对图像进行进一步滤波处理来平滑轮廓线。
[0074]
根据本发明一种优选的实施方式,按照下式所述对钢轨轮廓图像的进行滤波处理:
[0075][0076]
其中,g(x,y)为高斯滤波后的钢轨轮廓数字化图像,σ决定了高斯函数的宽度。
[0077]
在本发明中,采用高斯滤波器对钢轨轮廓图像进一步滤波来平滑轮廓线,即将灰度图像和高斯核g
σ
进行卷积。
[0078]
步骤2-3,对钢轨轮廓图像进行去噪处理。
[0079]
根据本发明一种优选的实施方式,按照下式所述的方法对钢轨轮廓图像去除噪点:
[0080][0081]
其中,s(x,y)表示图像开运算后的钢轨轮廓数字化图像,θ和分别表示腐蚀运算和膨胀运算,b表示开运算结构元素。
[0082]
本发明中利用图像形态学开运算进一步对图像去除噪点,此操作对图像先进行腐蚀运算,再进行膨胀运算。
[0083]
步骤2-4,对钢轨轮廓图像的轮廓线进行细化,得到轮廓线的中心线。
[0084]
根据本发明一种优选的实施方式,所述轮廓线的中心位置通过下式获得:
[0085][0086]
其中,x0为高斯曲线的中心坐标,a1和a2通过下述过程获得:
[0087][0088]
令则有:
[0089][0090]
其中,f(x)=lnf(x),n表示轮廓上有n个采样点,
[0091][0092][0093]
a为轮廓截面灰度值,x0为高斯曲线的中心坐标,ρ为轮廓线的宽度。
[0094]
在本发明中,用高斯拟合法对开运算后的轮廓线进行细化,利用householder变换求解得到待估参数,获得轮廓线的中心位置利用轮廓中心即可实现钢轨轮廓细化。
[0095]
本发明中,图3示出了经灰度化、高斯滤波、开运算、骨架提取后的钢轨轮廓图,说明经过机器视觉处理后,能够获取清晰的钢轨轮廓曲线。
[0096]
步骤3,获得轨距。
[0097]
优选地,步骤3包括以下子步骤:
[0098]
步骤3-1,对轨距的空间姿态坐标进行标定。
[0099]
在本发明中,需要建立左右两侧结构光视觉传感器获得图像的像素坐标系的映射关系,以对轨距的空间姿态坐标进行标定。
[0100]
根据本发明一种优选的实施方式,按照包括以下步骤的方法对轨距的空间姿态坐标进行标定:
[0101]
步骤3-1-1,获得左、右侧摄像机对应的图像像素坐标之间的转换关系。
[0102]
在本发明中,由于左侧钢轨处和右侧钢轨处的摄像机安装在同一个平面内,因此,
左、右两侧摄像机的坐标系可分别表示为o
c1
x
c1yc1zc1
和o
c2
x
c2yc2zc2
,图像像素坐标系可分别表示为o
p1
x
p1yp1zp1
和o
p2
x
p2yp2zp2
,如图4所示。
[0103]
由于左、右两侧摄像机的图像像素坐标在一个空间平面中,根据本发明一种优选的实施方式,通过下式获得测量空间中任意一点在左侧摄像机对应的图像像素坐标(x
p1
,y
p1
)和右侧摄像机对应的图像像素坐标之间的转换关系(x
p2
,y
p2
):
[0104][0105]
其中,β1~β6为转换系数。
[0106]
步骤3-1-2,对摄像机获得图像像素坐标的畸变进行标定。
[0107]
本发明人研究发现,摄像机的镜头存在畸变,需要对图像像素坐标进行畸变标定。
[0108]
根据本发明一种优选的实施方式,通过下式对图像像素坐标的畸变进行标定:
[0109][0110]
其中,畸变后的像素坐标为(x,y),x
p
,y
p
表示畸变前的像素坐标。
[0111][0112]
r2=x2+y2[0113]
其中,k1、k2表示径向畸变系数;b1、b2表示薄棱径畸变系数;s1、s2表示偏心畸变系数。
[0114]
在本发明中,标定过程中考虑的畸变类型为二阶径向畸变、薄绫畸变和偏心畸变。
[0115]
步骤3-1-3,获得左、右两侧摄像机图像像素坐标系的映射关系。
[0116]
根据本发明一种优选的实施方式,经过上述的坐标转换和畸变标定,获得左、右两侧摄像机图像像素坐标系的映射关系,如下式所示:
[0117][0118]
其中,上式中有18个未知参数(分别为k
11
,k
12
,k
21
,k
22
,b
11
,b
12
,b
21
,b
22
,s
11
,s
12
,s
21
,s
22
,β
1-β6),根据自由度约束,需要标定数据对大于参数个数,优选为20对。
[0119]
优选地,本发明利用最小二乘拟合法,通过足够多的标定数据对获得位置参数的值。
[0120]
在本发明中,通过上述步骤,获得未知参数的值,进而建立了钢轨左右两侧摄像机图像像素坐标系的映射关系,可以对钢轨图像的空间姿态坐标进行转换。
[0121]
步骤3-2,定位轨距点,获得轨距。
[0122]
优选地,步骤3-2包括以下子步骤:
[0123]
步骤3-2-1,获得钢轨轮廓的特征距离曲线。
[0124]
在本发明中,经过步骤2细化后的钢轨轮廓曲线如下式所示:
[0125]
l=[l(i)=(x(i),y(i)),i=1~m],m为曲线数据点数目,定义钢轨轮廓曲线上任意一点和前后m个数据点之间的距离为轮廓曲线的特征距离。
[0126]
根据本发明一种优选的实施方式,通过下式获得轮廓曲线的特征距离:
[0127]
d(j)=||l(j-m)-l(j+m)||,j∈[1+m,n-m]
[0128]
在进一步优选的实施方式中,通过下式获得钢轨轮廓的特征距离曲线:
[0129]
t(j)=(j,d(j)),j∈[1+m,n-m]
[0130]
在本发明中,钢轨轮廓曲线的各个特征距离构成了特征距离曲线。
[0131]
步骤3-2-2,定位左右两侧钢轨轮廓曲线的轨距点。
[0132]
在本发明中,考虑到特征距离越小表示该点与前后两点之间的联系越紧密,因此,根据本发明一种优选的实施方式,将特征距离曲线的最小值所对应的点(t-1
(min[t(j)]),min[t(j)])作为曲线轮廓的特征点。
[0133]
优选地,实际钢轨轮廓的特征曲线通过下式获得:
[0134]
l=(x((t-1
(min[t(j)])),y((t-1
(min[t(j)])))
[0135]
在进一步优选的实施方式中,左、右两侧钢轨轮廓曲线的特征点(即:轨距点)坐标通过下式获得:
[0136][0137]
其中,k为特征点在左右摄像机像素坐标系里的位置点数。
[0138]
步骤3-2-3,将左右两侧钢轨轮轮廓图像映射至同一侧的像素坐标系,获得轨距。
[0139]
根据本发明一种优选的实施方式,将右侧摄像机的钢轨轮廓图像映射到左侧摄像机的像素坐标上。
[0140]
其中,在像素坐标系中,右侧钢轨轮廓图像记为l2'(k),左侧钢轨轮廓图像记为l1(k)。
[0141]
在进一步优选的实施方式中,将左右两侧摄像机获得的钢轨轮廓图像在同一像素坐标系中轨距点之间的距离定义为c(k),通过下式获得轨距:
[0142]
g=min(c(k+1))
[0143]
本发明提供的基于结构光的轨距动态测量方法,不仅能够实现对轨距精确、高效、实时的非接触动态测量,还能够快速寻找钢轨轮廓的特征点,一定程度上提升了在线计算的速度以及检测系统运行时的抗干扰能力。
[0144]
实施例
[0145]
以下通过具体实例进一步描述本发明,不过这些实例仅仅是范例性的,并不对本发明的保护范围构成任何限制。
[0146]
实施例1
[0147]
本实施例采用的轨距动态检测装置由结构光视觉传感器、高速图像采集卡、里程计、上位机组成,其中,
[0148]
结构光视觉传感器具有两组,分别用于检测左侧钢轨和右侧钢轨,每组由一个面阵相机和一个线激光器组成,二者同步工作;面阵相机的摄像范围至少覆盖至轨面75%以下部分,线激光器的照射范围覆盖至钢轨底面;面阵相机和线激光器安装于轨检车的轨检梁上,左侧钢轨处的面阵相机与右侧钢轨处的面阵相机设置在同一平面内;
[0149]
里程计包括光电编码器和信号控制器,均设置在列车车轴上;
[0150]
按照下述步骤检测轨距:
[0151]
1、通过上述轨距动态检测装置获得左右两侧钢轨轮廓图像,并存储于上位机;
[0152]
2、对存储于上位机的钢轨轮廓图采用如下式所示的方法进行灰度化处理:
[0153]
其中,h(x,y)表示灰度化后的钢轨轮廓数字化图像,a为系数,r为指数;
[0154]
采用高斯滤波器对其做进一步滤波处理来平滑轮廓线,如下式所述:
[0155][0156]
其中,g(x,y)为高斯滤波后的钢轨轮廓数字化图像,σ决定了高斯函数的宽度;
[0157]
利用图像形态学开运算进一步对图像去除噪点,如下式所述:
[0158][0159]
其中,s(x,y)表示图像开运算后的钢轨轮廓数字化图像,θ和分别表示腐蚀运算和膨胀运算,b表示开运算结构元素;
[0160]
采用高斯拟合法对开运算后的轮廓线进行细化,得到轮廓线的中心线:
[0161]
高斯函数为:
[0162][0163]
式中:a为轮廓截面灰度值,x0为高斯曲线的中心坐标,ρ为轮廓线的宽度,两边取对数,得到:
[0164][0165]
令f(x)=lnf(x),轮廓上有n个采样点,利用最小二乘法求解待估算的参数a0、a1、a2:
[0166][0167]
令得到方程:
[0168]
[0169]
利用householder变换求解得到待估参数,则轮廓的中心位置为:
[0170][0171]
3、通过下式获得测量空间中任意一点在左侧摄像机对应的图像像素坐标(x
p1
,y
p1
)和右侧摄像机对应的图像像素坐标之间的转换关系(x
p2
,y
p2
):
[0172][0173]
通过下式对图像像素坐标的畸变进行标定:
[0174][0175]
其中,畸变后的像素坐标为(x,y),
[0176][0177]
r2=x2+y2;
[0178]
经过上述的坐标转换和畸变标定,获得左、右两侧摄像机图像像素坐标系的映射关系,如下式所示:
[0179][0180]
通过下式获得轮廓曲线的特征距离:
[0181]
d(j)=||l(j-m)-l(j+m)||,j∈[1+m,n-m]
[0182]
通过下式获得钢轨轮廓的特征距离曲线:
[0183]
t(j)=(j,d(j)),j∈[1+m,n-m];
[0184]
将特征距离曲线的最小值所对应的点(t-1
(min[t(j)]),min[t(j)])作为曲线轮廓的特征点,
[0185]
实际钢轨轮廓的特征曲线通过下式获得:
[0186]
l=(x((t-1
(min[t(j)])),y((t-1
(min[t(j)])))
[0187]
左、右两侧钢轨轮廓曲线的特征点坐标通过下式获得:
[0188][0189]
将左右两侧摄像机获得的钢轨轮廓图像在同一像素坐标系中轨距点之间的距离定义为c(k),通过下式获得轨距:
[0190]
g=min(c(k+1))。
[0191]
实验例
[0192]
采用实施例1所述的装置、方法,利用轨检小推车进行轨距检测现场试验,利用20个位置重复进行多次轨距测量;然后,利用轨距尺进行复核,检测结果如表1所示。
[0193]
表1
[0194]
[0195]
进一步地,图5示出了实施例1所述方法实测的20处轨距测量值与轨距尺测量值的对比及误差曲线。
[0196]
由表1和图5可知,本发明实施例所述的装置及方法,能够实现对轨距的精确测量。
[0197]
以上结合具体实施方式和范例性实例对本发明进行了详细说明,不过这些说明并不能理解为对本发明的限制。本领域技术人员理解,在不偏离本发明精神和范围的情况下,可以对本发明技术方案及其实施方式进行多种等价替换、修饰或改进,这些均落入本发明的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1