基于无人机对预埋角反射器的边坡变形监测的方法
1.本发明涉及边坡变形监测技术领域,尤其涉及基于无人机对预埋角反射器的边坡变形监测的方法。
背景技术:
2.山体滑陂是指山体斜坡上某一部分岩土在自身重力或地下水的动静压力作用下,沿着一定的软弱结构面产生剪切位移而整体地向斜坡下方移动的作用和现象。
3.山体滑坡多发生在山地的山坡、丘陵地区的斜坡、岸边、路堤或基坑等地带。特别位于人民居住、山区道路、铁路沿线等区域,山体滑坡不仅造成一定范围内的人员伤亡、财产损失,还会对附近道路交通造成严重威胁,破环现有的自然环境及平衡。
4.滑坡的发展一般分为三个阶段。1.蠕动变形阶段:主要是缓慢、匀速、小量的沉陷或滑移,坡面出现裂缝,后缘渐被拉裂,历时从数天到数十年;2.急剧滑动阶段:滑动面和切割面已形成,各种滑坡形态相继出现,急剧滑动阶段历时很短,一般约几分钟到几十分钟,快的每分钟数米到数十米,甚至每秒几十米;3.渐趋稳定阶段:在重力等作用下,滑坡体土石块逐渐密实,地表裂缝闭合,前缘渗水变清,滑体趋于稳定,但如遇新的诱发因素,又再次变形破坏。滑坡的形成有自然因素和人为因素两方面。自然因素就防汛而言有地貌形态、地质结构、降水、地下水等;人为因素有边坡开挖过陡、爆破影响、堆土不当等。滑坡需有临空面和各种因素的综合作用下形成滑动面与切割面,且滑动力大于抗滑力时才能下滑。滑动面与剪切面经常不是同时形成,而是在一个点或一个局部范围先剪断破坏,然后逐渐发展成贯通的剪切破坏面。
5.在发生滑坡前,会产生一系列的特征,如岩土裂缝、垮塌、水位异常等较为异常现象。这些特征都易于检测或观测到,因此,针对有潜在危害的山体进行监测,对山体滑坡的预测具有非常重要的作用。但是,现有技术中,对山体滑坡没有比较及时有效的技术手段,通常都是人工进行户外勘察,不仅效率低、人工劳动强度大,监测人员安全无法得到保证,并且在出现山体滑坡时还不能及时发现,造成较大的经济损失。因此,需要设计一种反应速度更快,更安全的边坡变形监测的方法。
技术实现要素:
6.本发明的目的在于提供基于无人机对预埋角反射器的边坡变形监测的方法,解决背景技术中提到的技术问题。
7.为了实现上述目的,本发明采用的技术方案如下:
8.基于无人机对预埋角反射器的边坡变形监测的方法,将若干个边坡监测端安装在边坡上,然后把无人机监测端在边坡的相对面起飞,并保持固定位置不变,无人机监测端对边坡进行照射,边坡监测端把大部分光反射给无人机,当边坡发生滑坡时,其中一个边坡监测端的光无法反射到无人机监测端,则判定为发生滑坡,同时边坡监测端实时检测边坡的震动信号,然后根据检测信号判断是否出现滑坡,并把检测信号传给无人机监测端。
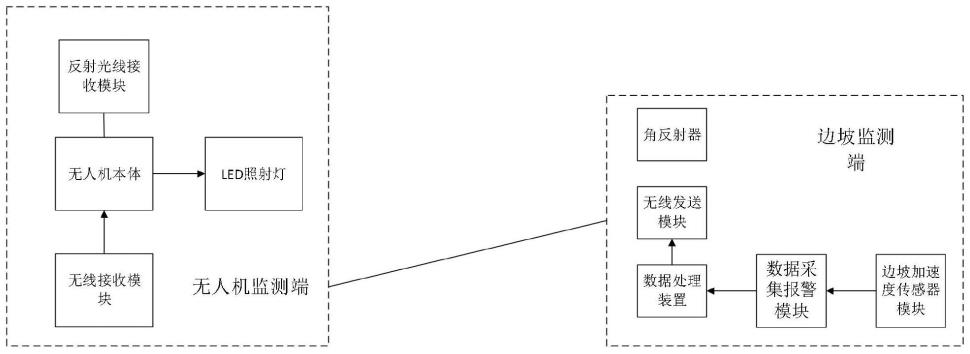
9.进一步地,边坡监测端包括角反射器、无线发送模块、数据处理装置、数据采集报警模块和边坡加速度传感器模块,边坡加速度传感器模块经数据采集报警模块与数据处理装置连接,数据处理装置经无线发送模块与无人机监测端无线连接,角反射器安装反射面与无人机监测端相对设置,边坡加速度传感器模块用于获取边坡滑体或者移动所产生的微震信号,使用长短时窗幅值比法拾取微震波形数据,同时使用阈值判别法对微震波形数据进行分析并根据分析结果进行预警,并将数据传输经至数据采集报警模块传给数据处理装置,数据采集报警模块设置有报警器,当边坡加速度传感器模块采集信号大于预设值,提前发出报警声,数据处理装置用于使用p波初动时刻识别算法识别出边坡加速度传感器模块块传入的微震波形数据的p波初动时刻,使用匹配算法处理得到边坡滑体事件对应的四通道微震波形数据。
10.进一步地,无人机监测端包括无线接收模块、led照射灯、无人机本体和反射光线接收模块,无线接收模块、led照射灯和反射光线接收模块均与无人机本体连接,led照射灯设置在无人机本体的前端,led照射灯将灯光照射到边坡上,然后经角反射器反射后给反射光线接收模块,当反射光线接收模块从接收有光反射,后面无法接收到时,则判断边坡出现滑坡的情况,并通过无人机本体报警或者通报管理人员。
11.进一步地,获取边坡滑体或者移动所产生的微震信号的具体过程为:
12.当边坡出现滑体时会释放出低能量的弹性波并向四周传播,引发边坡的微小震动,边坡加速度传感器模块的加速度传感器将边坡微小震动的加速度值转换为电压值从而得到微震信号,每个数据采集模块有四个加速度传感器,设第i个加速度传感器输出的电压值为vi,与检测到的加速度ai的转换关系如下:
[0013][0014]
式中,d表示压电常数,m表示加速度传感器内部压电元件的质量,c表示压电元件两端的电容,在加速度传感器型号确定的情况下其d、m和c均为确定常量,因此电压值vi与加速度ai成正比,所采集的微震信号的电压值越大,表示检测到的岩体震动的加速度越大;
[0015]
边坡加速度传感器模块的四个加速度传感器将分别输出微震信号,使用边坡加速度传感器模块的a/d转换电路将各加速度传感器输出的微震信号转换为数字化的幅值序列,然后传输至边坡加速度传感器模块的微震波形拾取电路作进一步处理。
[0016]
进一步地,使用阈值判别法对微震波形数据进行分析并根据分析结果的具体过程为:
[0017]
建一个微震波形数据处理数组,从所述的微震波形数据暂存队列的头部中取出一个微震波形数据,将其逐元素复制到微震波形数据处理数组中,微震波形数据是长度为l的一维微震信号幅值序列;
[0018]
从微震波形数据处理数组的第一个元素开始遍历,到最后一个元素结束遍历,记录下所有元素中的最大值v
max
,若v
max
大于等于阈值v
threshold
,说明需要发出本地预警,所述的阈值v
threshold
是根据现场监测边坡设定的阈值。
[0019]
进一步地,数据处理装置用于使用p波初动时刻识别算法识别出边坡加速度传感器模块块传入的微震波形数据的p波初动时刻的具体过程为:
[0020]
数据处理装置中创建数据接收缓冲队列和等待匹配队列,数据处理装置每次接收
到微震数据包后,将其放置于数据接收缓冲队列尾部,微震数据包包括微震波形数据、微震信号起始时间戳、微震信号结束时间戳和加速度传感器编号,建一个微震波形数据处理数组,从数据接收缓冲队列头部取出一个微震数据包,从微震数据包中取出微震波形数据、微震信号起始时间戳time1、微震信号结束时间戳time2以及加速度传感器编号,将微震波形数据逐元素复制到微震波形数据处理数组中,设vi为微震波形数据处理数组中索引为i处的值,l为微震波形数据处理数组的长度,v
iavg
为微震波形数据处理数组索引为i之前所有元素绝对值的均值,其计算方式如式(2)所示:
[0021][0022]
初始化时,i设置为1,令i自增一并计算v
iavg
,若i≤l且满足vi≥2
×viavg
,则表示找到了p波初动时刻对应的索引,转步骤五;若i≤l且满足vi<2
×viavg
,则表示尚未找到p波初动时刻对应的索引,若i>l;
[0023]
计算p波初动时刻time
p
,其计算公式如式(3)所示:
[0024][0025]
将计算得到的p波初动时刻time
p
添加到当前的微震数据包中,然后将该微震数据包插入等待匹配队列尾部,开始计算下一个微震数据包的微震波形数据的p波初动时刻。
[0026]
进一步地,匹配算法处理得到边坡滑体事件对应的四通道微震波形数据的具体过程为:在匹配算法处理得到边坡滑体事件对应的四通道微震波形数据中创建等待定位队列和匹配数据表,匹配数据表中每一行都保存属于同一岩体破裂事件的各个通道的微震数据包,每一行均有两个字段分别为p波初动时刻字段和微震数据包列表字段,记匹配数据表第j行的p波初动时刻字段的内容为从等待匹配队列头部取出一个微震数据包,取出其p波初动时刻遍历整个匹配数据表中所有行的p波初动时刻字段,若存在行号为j的行满足则表示该微震数据包中的微震波形数据是属于第j行对应的岩体破裂事件,t根据监测现场环境设定。
[0027]
本发明由于采用了上述技术方案,具有以下有益效果:
[0028]
本发明通过角反射器进行反射光线来进一步判断边坡是否出现滑动,具有高效,实时准确的特点,同时结合电子的监测,设置震动信号来监测是否出现滑坡的情况,电子信号处理来判断,双重保护,当led探照灯对边坡进行照射的时候,角反射器能够把大部分光反射给无人机,从而提高无人机的测量精度,提前预测边坡坍塌或者滑坡。
附图说明
[0029]
图1是本发明监测原理框图。
[0030]
图2是本发明角反射器原理图。
具体实施方式
[0031]
为使本发明的目的、技术方案及优点更加清楚明白,以下参照附图并举出优选实
施例,对本发明进一步详细说明。然而,需要说明的是,说明书中列出的许多细节仅仅是为了使读者对本发明的一个或多个方面有一个透彻的理解,即便没有这些特定的细节也可以实现本发明的这些方面。
[0032]
如图1-2所示,基于无人机对预埋角反射器的边坡变形监测的方法,将若干个边坡监测端安装在边坡上,然后把无人机监测端在边坡的相对面起飞,并保持固定位置不变,无人机监测端对边坡进行照射,边坡监测端把大部分光反射给无人机,当边坡发生滑坡时,其中一个边坡监测端的光无法反射到无人机监测端,则判定为发生滑坡,同时边坡监测端实时检测边坡的震动信号,然后根据检测信号判断是否出现滑坡,并把检测信号传给无人机监测端。通过安装角反射器,实时反射光线,可以实时判断是否出现滑坡的情况,同时设置震动检测电子结构,经过信号处理,实现更高精度的检测。
[0033]
本发明实施例中,边坡监测端包括角反射器、无线发送模块、数据处理装置、数据采集报警模块和边坡加速度传感器模块,边坡加速度传感器模块经数据采集报警模块与数据处理装置连接,数据处理装置经无线发送模块与无人机监测端无线连接,角反射器安装反射面与无人机监测端相对设置,边坡加速度传感器模块用于获取边坡滑体或者移动所产生的微震信号,使用长短时窗幅值比法拾取微震波形数据,同时使用阈值判别法对微震波形数据进行分析并根据分析结果进行预警,并将数据传输经至数据采集报警模块传给数据处理装置,数据采集报警模块设置有报警器,当边坡加速度传感器模块采集信号大于预设值,提前发出报警声,数据处理装置用于使用p波初动时刻识别算法识别出边坡加速度传感器模块块传入的微震波形数据的p波初动时刻,使用匹配算法处理得到边坡滑体事件对应的四通道微震波形数据。
[0034]
本发明实施例中,无人机监测端包括无线接收模块、led照射灯、无人机本体和反射光线接收模块,无线接收模块、led照射灯和反射光线接收模块均与无人机本体连接,led照射灯设置在无人机本体的前端,led照射灯将灯光照射到边坡上,然后经角反射器反射后给反射光线接收模块,当反射光线接收模块从接收有光反射,后面无法接收到时,则判断边坡出现滑坡的情况,并通过无人机本体报警或者通报管理人员。
[0035]
本发明实施例中,获取边坡滑体或者移动所产生的微震信号的具体过程为:
[0036]
当边坡出现滑体时会释放出低能量的弹性波并向四周传播,引发边坡的微小震动,边坡加速度传感器模块的加速度传感器将边坡微小震动的加速度值转换为电压值从而得到微震信号,每个数据采集模块有四个加速度传感器,设第i个加速度传感器输出的电压值为vi,与检测到的加速度ai的转换关系如下:
[0037][0038]
式中,d表示压电常数,m表示加速度传感器内部压电元件的质量,c表示压电元件两端的电容,在加速度传感器型号确定的情况下其d、m和c均为确定常量,因此电压值vi与加速度ai成正比,所采集的微震信号的电压值越大,表示检测到的岩体震动的加速度越大;
[0039]
边坡加速度传感器模块的四个加速度传感器将分别输出微震信号,使用边坡加速度传感器模块的a/d转换电路将各加速度传感器输出的微震信号转换为数字化的幅值序列,然后传输至边坡加速度传感器模块的微震波形拾取电路作进一步处理。
[0040]
本发明实施例中,使用阈值判别法对微震波形数据进行分析并根据分析结果的具
体过程为:
[0041]
建一个微震波形数据处理数组,从所述的微震波形数据暂存队列的头部中取出一个微震波形数据,将其逐元素复制到微震波形数据处理数组中,微震波形数据是长度为l的一维微震信号幅值序列;
[0042]
从微震波形数据处理数组的第一个元素开始遍历,到最后一个元素结束遍历,记录下所有元素中的最大值v
max
,若v
max
大于等于阈值v
threshold
,说明需要发出本地预警,所述的阈值v
threshold
是根据现场监测边坡设定的阈值。
[0043]
本发明实施例中,数据处理装置用于使用p波初动时刻识别算法识别出边坡加速度传感器模块块传入的微震波形数据的p波初动时刻的具体过程为:
[0044]
数据处理装置中创建数据接收缓冲队列和等待匹配队列,数据处理装置每次接收到微震数据包后,将其放置于数据接收缓冲队列尾部,微震数据包包括微震波形数据、微震信号起始时间戳、微震信号结束时间戳和加速度传感器编号,建一个微震波形数据处理数组,从数据接收缓冲队列头部取出一个微震数据包,从微震数据包中取出微震波形数据、微震信号起始时间戳time1、微震信号结束时间戳time2以及加速度传感器编号,将微震波形数据逐元素复制到微震波形数据处理数组中,设vi为微震波形数据处理数组中索引为i处的值,l为微震波形数据处理数组的长度,vi为微震波形数据处理数组索引为i之前所有元素绝对值的均值,其计算方式如式(2)所示:
[0045][0046]
初始化时,i设置为1,令i自增一并计算vi,若i≤l且满足vi≥2
×viavg
,则表示找到了p波初动时刻对应的索引,转步骤五;若i≤l且满足vi<2
×viavg
,则表示尚未找到p波初动时刻对应的索引,若i>l;
[0047]
计算p波初动时刻time
p
,其计算公式如式(3)所示:
[0048][0049]
将计算得到的p波初动时刻time
p
添加到当前的微震数据包中,然后将该微震数据包插入等待匹配队列尾部,开始计算下一个微震数据包的微震波形数据的p波初动时刻。
[0050]
本发明实施例中,匹配算法处理得到边坡滑体事件对应的四通道微震波形数据的具体过程为:在匹配算法处理得到边坡滑体事件对应的四通道微震波形数据中创建等待定位队列和匹配数据表,匹配数据表中每一行都保存属于同一岩体破裂事件的各个通道的微震数据包,每一行均有两个字段分别为p波初动时刻字段和微震数据包列表字段,记匹配数据表第j行的p波初动时刻字段的内容为从等待匹配队列头部取出一个微震数据包,取出其p波初动时刻遍历整个匹配数据表中所有行的p波初动时刻字段,若存在行号为j的行满足则表示该微震数据包中的微震波形数据是属于第j行对应的岩体破裂事件,t根据监测现场环境设定。
[0051]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应
视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1