一种风积沙地形条件下岩移变形机载激光雷达测量方法与流程
1.本发明公开了一种风积沙地形条件下岩移变形机载激光雷达测量方法,属于无人机测量技术领域。
背景技术:
2.国内外岩层移动研究成果表明,目前对浅部开采岩层移动规律、预测方法及控制理论等的研究较为成熟,已经能够满足浅部正常地质采矿条件下的工程需要,但对深部开采条件下,尤其是厚层风积沙出露地表的沉陷机理、预测方法及控制理论尚不完善,不能满足深部开采条件下地表沉陷预测及控制的需要。针对上述问题,本发明针对厚层风积沙出露地表地质采矿条件下开采地表移动规律进行研究,通过开展沉降观测并对观测结果进行分析,从而得出符合该地区的地表移动变形规律和沉降系数。
技术实现要素:
3.本发明公开了一种风积沙地形条件下岩移变形机载激光雷达测量方法,以解决现有技术中,风积沙地形条件下无人机测量精度低的问题。
4.一种风积沙地形条件下岩移变形机载激光雷达测量方法,包括:s1.装置布设,根据开采工作面位置和走向,在开采沉陷影响范围外布设永久监测装置,对装置进行48小时的连测,测量出每个特征点的绝对坐标和特征线的方位角;s2.靶标布设,在工作面上方沿航线水平布设平面靶标,在平面靶标底座下垂直埋设内部设有曲度传感器的软钢管,所述曲度传感器实时监测软钢管的弯曲度和方向;s3.数据采集,利用无人机进行机载三维激光扫描,周期性获取工作面的地表点云数据;s4.地表点云数据处理,利用地表点云数据处理软件,进行数据滤波和数据插值;s5.dem模型构建,利用s4处理后的地表点云数据构建dem模型;s6.沉降模型获取,对多期dem模型进行叠加做差处理,周期性解算获取沉降模型;s7.参数计算,利用概率积分法计算地表岩移参数。
5.优选地,步骤s2中,平面靶标布设时,选择布设密度和布设图形,然后对靶标中心进行定位测量得到平面靶标的绝对坐标。
6.优选地,步骤s3中,首先规划无人机飞行航线,无人机飞行航线在靶标正上方,覆盖每个布设的靶标。
7.优选地,步骤s3中,根据靶标的大小和靶标采集点云数据的需求设置无人机飞行速度和高度。
8.优选地,步骤s3中,还应用传统水准测量工具对所有靶标和装置进行水准观测,精确测量出每个点的高程数据。
9.优选地,步骤s4中,对传统水准数据、机载激光雷达点云数据和装置倾斜数据三种数据进行数据整理和对比分析,以传统水准测量数据为起始数据验证机载激光雷达点云数
据的精度。
10.优选地,步骤s4中,将平面靶标的点云数据加入到装置倾斜数据中进行精确求解,解算出靶标中心点位的高程值。
11.与现有技术相比,本发明的有益效果为:在数据处理中利用平面靶标数据质量高且唯一性特征,剔除了点位对比时由不同点对比的误差,解决了传统观测数据与多期点云数据的对比问题,获取了更为精确的岩移沉降变化数据;以布设的永久性监测特殊装置作为矿区变形监测控制点,以永久性监测点在不同模型中的坐标一致性解算不同模型的模型配准参数,剔除了不同模型间的系统误差;对比现有技术,本发明可以在风积沙地形条件下获取较高的测量精度,经检测成果的平面精度误差优于20mm,高程精度误差优于15mm。
附图说明
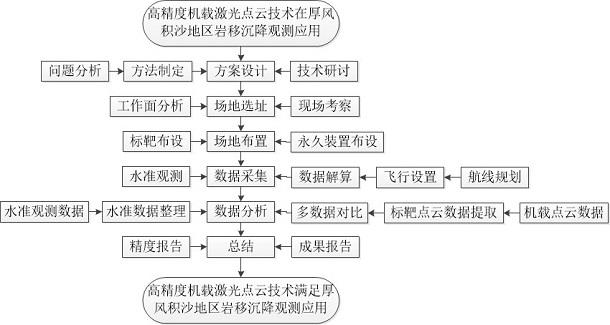
12.图1为本发明的技术流程图;图2为永久监测装置和平面靶标的位置图,图中a为飞行方向;附图标记包括:1-无人机,2-开采沉陷区,3-永久监测装置,4-平面靶标。
具体实施方式
13.下面结合具体实施方式对本发明作进一步详细说明:一种风积沙地形条件下岩移变形机载激光雷达测量方法,如图1,包括:s1.通过现场考察和工作面分析进行场地选址,然后进行场地布置,如图2,图中的无人机1表示了其相继出现的三个位置以及其飞行路线,根据开采工作面位置和走向,确定无人机1飞行路线,沿飞行路线在开采沉陷区2范围外布设永久监测装置3,具体位于开采沉陷区2的前后两侧,对永久监测装置3进行48小时的连测,测量出每个特征点的绝对坐标和特征线的方位角;s2.靶标布设,在开采沉陷区2的工作面上方沿航线水平布设平面靶标4,在平面靶标4底座下垂直埋设内部设有曲度传感器的软钢管,所述曲度传感器实时监测钢管的弯曲度和方向;在工作面上方沿航线布设平面特殊靶标,永久监测特殊装置具体为2米见方超水平u型平底混凝土垒台,已知特征点、特征线的绝对坐标和方位。
14.s3.数据采集,利用无人机1进行机载三维激光扫描,周期性获取工作面的地表点云数据;s4.地表点云数据处理,利用地表点云数据处理软件,进行数据滤波和数据插值;s5.dem模型构建,利用s4处理后的地表点云数据构建dem模型;对具有一定厚度的点云数据进行拟合,形成几何面点云数据,再进行生产dem模型。
15.s6.沉降模型获取,对多期dem模型进行叠加做差处理,周期性解算获取沉降模型;对配准后的dem模型进行叠加做差处理,获取了高精度沉降盆地。
16.s7.参数计算,利用概率积分法计算地表岩移参数。
17.步骤s2中,平面靶标4布设时,选择布设密度和布设图形,然后对靶标中心进行定位测量得到平面靶标4的绝对坐标。
18.步骤s3中,首先规划无人机1飞行航线,无人机1飞行航线在靶标正上方,覆盖每个布设的靶标。
19.步骤s3中,根据靶标的大小和靶标采集点云数据的需求设置无人机1飞行速度和高度。
20.步骤s3中,还应用传统水准测量工具对所有靶标和装置进行水准观测,精确测量出每个点的高程数据,数据采集使用往返测量方法,传统水准测量按照二等水准观测方法三等水准测量要求进行水准观测,应用电子水准仪测量,尽可能减少人为误差。
21.步骤s4中,对传统水准数据、机载激光雷达点云数据和装置倾斜数据三种数据进行数据整理和对比分析,以传统水准测量数据为起始数据验证机载激光雷达点云数据的精度。
22.步骤s4中,将平面靶标4的点云数据加入到装置倾斜数据中进行精确求解,解算出靶标中心点位的高程值。
23.实施例的实验是在未发生岩移沉降时进行的数据采集,因此平面靶标4倾斜值为零,直接应用平面解算出的高程值。由于机载雷达进行往返测量,因此对数据进行处理剔除系统误差。处理后的点云数据与传统水准测量数据进行对比分析,得出成果的平面精度误差优于20mm,高程精度误差优于15mm。
24.当然,上述说明并非是对本发明的限制,本发明也并不仅限于上述举例,本技术领域的技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也应属于本发明的保护范围。
技术特征:
1.一种风积沙地形条件下岩移变形机载激光雷达测量方法,其特征在于,包括:s1.装置布设,根据开采工作面位置和走向,在开采沉陷影响范围外布设永久监测装置,对装置进行连测,测量出每个特征点的绝对坐标和特征线的方位角;s2.靶标布设,在工作面上方沿航线水平布设平面靶标,在平面靶标底座下垂直埋设内部设有曲度传感器的软钢管,所述曲度传感器实时监测软钢管的弯曲度和方向,获取装置倾斜数据;s3.数据采集,利用无人机进行机载三维激光扫描,周期性获取工作面的地表点云数据;s4.地表点云数据处理,利用地表点云数据处理软件,进行数据滤波和数据插值;s5.dem模型构建,利用s4处理后的地表点云数据构建dem模型;s6.沉降模型获取,对多期dem模型进行叠加做差处理,周期性解算获取沉降模型;s7.参数计算,利用概率积分法计算地表岩移参数。2.根据权利要求1所述的风积沙地形条件下岩移变形机载激光雷达测量方法,其特征在于,步骤s2中,平面靶标布设时,选择布设密度和布设图形,然后对靶标中心进行定位测量得到平面靶标的绝对坐标。3.根据权利要求2所述的风积沙地形条件下岩移变形机载激光雷达测量方法,其特征在于,步骤s3中,首先规划无人机飞行航线,无人机飞行航线设在靶标正上方,覆盖每个布设的靶标。4.根据权利要求3所述的风积沙地形条件下岩移变形机载激光雷达测量方法,其特征在于,步骤s3中,根据靶标的大小和靶标采集点云数据的需求设置无人机飞行速度和高度。5.根据权利要求4所述的风积沙地形条件下岩移变形机载激光雷达测量方法,其特征在于,步骤s3中,还应用传统水准测量工具对所有平面靶标和永久监测装置进行水准观测,精确测量出每个点的高程,获得对传统水准数据。6.根据权利要求5所述的风积沙地形条件下岩移变形机载激光雷达测量方法,其特征在于,步骤s4中,对传统水准数据、点云数据和装置倾斜数据三种数据进行数据整理和对比分析,以传统水准数据为起始数据验证点云数据的精度。7.根据权利要求6所述的风积沙地形条件下岩移变形机载激光雷达测量方法,其特征在于,步骤s4中,将平面靶标的点云数据加入到装置倾斜数据中进行精确求解,解算出靶标中心点位的高程值。
技术总结
本发明公开了一种风积沙地形条件下岩移变形机载激光雷达测量方法,属于无人机测量技术领域,主要解决风积沙地形条件下,受地形的积沙流动影响造成无人机测量精度低的问题,其步骤包括:在开采沉陷影响范围外布设永久监测装置;在工作面上方沿航线水平布设平面靶标,在平面靶标底座下垂直埋设内部设有曲度传感器的软钢管,所述曲度传感器实时监测钢管的弯曲度和方向;利用无人机进行机载三维激光扫描,周期性获取工作面的地表点云数据;利用地表点云数据处理软件,进行数据滤波和数据插值;利用地表点云数据构建DEM模型;对多期DEM模型进行叠加做差处理,周期性解算获取沉降模型;利用概率积分法计算地表岩移参数。利用概率积分法计算地表岩移参数。利用概率积分法计算地表岩移参数。
技术研发人员:王冬 王九红 轩涛 赵迎春 任彦存 李运江 时荫 高旭 白学永
受保护的技术使用者:内蒙古昊盛煤业有限公司
技术研发日:2022.05.30
技术公布日:2022/7/1
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1