一种基于散点拟合测量的隧道自动化监控测量设备及方法与流程
1.本发明涉及一种基于散点拟合测量的隧道自动化监控测量设备及方法,属于隧道工程建设技术领域。
背景技术:
2.作为隧道新奥法施工的重要手段,隧道监控量测的重要性不言而喻。通过监控量测手段动态监测初期支护的变形情况,可科学了解隧道支护结构与围岩的力学作用关系,掌握初期支护结构的稳定性情况,并为隧道动态设计和信息化施工提供必要的技术资料。可以说,监控量测是隧道建设过程中至关重要的技术手段,也是保证隧道施工安全的信息化武器。目前隧道监控量测工作一般是通过人工使用全站仪、水准仪或收敛计等测量仪器开展的,其在理论上可满足相关的监测要求,但受人为因素影响,不可避免的存在着监测频率过低、监测数据容易失真等现实问题,从而无法有效反映支护结构的动态变形情况。同时,现有监测数据的分析工作大多仍由人工组织开展,因而监测分析结果也受到了人为不确定因素的干扰。此外,当隧道初期支护出现开裂变形情况时,派遣测量人员进入洞内开展变形情况量测工作本身也存在一定的安全风险。
3.可以看出,以人工形式开展监控量测工作存在着不容忽视的弊端,而目前市场上现有的隧道自动监控量测系统则存在着设备功能简陋、仪器费用昂贵、实用性较低等诸多问题,导致实际使用效果欠差。鉴于上述考虑,研究一种基于散点拟合测量的隧道自动化监控量测设备及方法已经成为工程界亟待解决的问题。
技术实现要素:
4.鉴于此,本发明的目的是提供一种基于散点拟合测量的隧道自动化监控测量设备及方法,可以克服现有技术的不足。
5.本发明的目的是通过以下技术方案实现的:
6.一种基于散点拟合测量的隧道自动化监控测量设备,其包括能在隧道内纵向自由移动的监测台车,在监测台车上设有多件激光射线装置,所述激光射线装置与后台处理系统电信相连;所述激光射线装置用于对支护结构拱顶至拱脚全范围进行相对密集的点激光巡回测量工作,采集监测散点的坐标信息,所述后台处理系统用于通过监测散点的坐标信息拟合得到特定监测断面的轮廓形状,并提取相应特征点的坐标信息并进行坐标换算,可得到施工过程所需要的支护结构变形数据,发出对应等级的预警信息。
7.前述监测台车包括与隧道轮廓相对应的拱形桁架,拱形桁架底部设有行走机构及振动监测仪器;所述激光射线装置为多件环形布设在拱形桁架的前侧面上,以实现对监测台车前方隧道轮廓的全方位检测。
8.前述激光射线装置包括激光射线头,激光射线头通过能实现其横向偏角和竖向偏角两个方向自由度调节的固定架与拱形桁架相连接。
9.一种基于散点拟合测量的隧道自动化监控测量方法,其包括以下步骤:
10.s1、根据现场施工需要,在隧道支护结构表面设置多个监测分区;
11.s2、通过巡检方式对监测分区进行相对密集的点激光巡回测量工作,采集监测散点的坐标信息,并通过监测散点的坐标信息拟合得到特定监测断面的轮廓形状;
12.s3、获取特定监测断面轮廓形状上特定特征点在不同时间点的坐标信息,计算提取出所需要的初期支护变形数据;
13.s4、制定相应的支护结构变形风险判定准则,以及相应的预警等级、自动应急措施。
14.前述的方法,所述监测分区沿隧道纵向设置多环,每环上的监测分区沿隧道轮廓拱顶至拱脚全范围设置,并且相邻监测分区的纵向位置一一相对,使其构成多条纵向监测区。
15.前述的方法,采集隧道测量坐标系以及监测散点的单位坐标系,所述的隧道测量坐标系与项目的施工控制网坐标系保持一致;所述的监测散点的单位坐标系以监测散点所在线位的切线线路方向为y轴的正向,竖直方向为z轴方向,其后根据右手定律确定x轴方向;
16.通过免棱镜的测量技术,在后台处理系统内设置相关监测散点的分布规律,采用激光射线装置按相应的分布规律进行点激光巡回测量,得到密集的点坐标,并用其拟合特定断面的隧道轮廓形状,通过多个拟合得到的断面轮廓形状进一步拟合得到三维的隧道空间形状。
17.前述的方法,密集点坐标的采集步骤如下:
18.s2.1、针对每条纵向监测区,设置与之位置相对的激光射线装置,对各台激光射线装置进行编号,采用全站仪测量得到各台激光射线装置的绝对坐标值(x
qm
,y
qm
,z
qm
),x
qm
、y
qm
、z
qm
分别为激光射线装置q在监测台车第m次移动位置上x、y、z坐标值;
19.s2.2、监测过程中,有次序的调整激光射线装置的横向偏角β和竖向偏角α,使得监测散点相对均匀的分布在支护结构上;
20.s2.3、首先按固定数值调整横向偏角β进行监测分区的一环测点的测量工作,再按不固定角度ζ调整纵向偏角β,使得激光射线装置进入下一环测点位置并进行点激光测量,循环往复,记录激光射线装置q在监测台车第h移位位置、第m循环监测中,第n环向测线,第k监测散点的监测信息:t
qhmnk-(x
qh
+a
qhmnk
,y
qh
+b
qhmnk
,z
qh
+c
qhmnk
);
21.s2.4、采用内插的方式,根据前后相邻两条环向测线拟合构建两条环向测线之间特定断面的隧道轮廓形状,使多个拟合的隧道轮廓形状的纵向间距相等;而在隧道轮廓形状上,特定坐标点的坐标信息为前后环向测线上对应监测散点坐标的平均值。
22.前述的方法,采用先调整横向角度,后调整纵向角度的监测散点布置方式,可使得相邻监测散点的监测时间差相对最小,具体调控过程为:
23.(1)初始状态下,纵向角度归零至90度,横向角度调整至所属环向测量分区横向偏角的中间值,并测量巡回监测的测量偏距为dq;
24.(2)横向角度调整至环向测量分区横向偏角的下限数值,进行点激光测量,其后按固定数值逐步调整横向偏角至环向测量分区横向偏角的上限数值,每个调整点均进行点激光测量工作,此时完成第一纵向角度断面的全部测量工作;再按不固定角度ζ调整纵向偏角至下一个数值,继续进行点激光测量;循环往复
…
25.(3)当纵向偏角调整到极限值并完成测量后,一次性调整激光射线装置返回初始状态,即纵向角度归零至90度,横向角度归零至环向测量分区横向偏角的下限数值,并继而开始下一巡回监测工作。
26.前述的方法,所述横向偏角的调整固定数为1度-5度,根据实际需要由后台程序设定;
27.纵向偏角的不固定角度ζ计算公式为:
28.ζ1=arctan(b/dq)
29.ζ2=arctan(2*b/dq)-ζ130.…
31.ζn=arctan(n*b/dq)-ζ
(n-1)
32.式中,b为相邻环监测散点的纵向间距,根据实际需要由后台处理系统设定;
33.在步骤(3)中,所述纵向角度的极限值为当激光射线的纵向偏角减小到已经照射到掌子面上为止。
34.前述的方法,步骤2.4中,拟合构建隧道轮廓形状的具体过程如下:
35.(1)根据点激光测量得到的监测散点拟合构建多道纵向间距为b的监测断面轮廓形状,构建断面所选用的监测散点为所构建断面前后相邻环监测散点,拟合断面的坐标参数为参与拟合监测散点坐标信息的内插值,时间参数为拟合监测散点监测时间的平均值;
36.(2)根据拟合得到的监测断面轮廓形状,提取监测断面内拱顶、拱腰和拱脚位置特征点的坐标信息和时间参数。
37.前述的方法,根据特定特征点多个时间点的坐标信息,进行对应时间段内支护结构的变形情况的计算分析,具体过程如下:
38.第i特征点在t1的监测信息:i-(x
it1
,y
it1
,z
it1
)-t1;
39.第i特征点在t2的监测信息:i-(x
it2
,y
it2
,z
it2
)-t2;
40.(1)特征点i的沉降变形数值计算:
41.δh
i(t2-t1)
=z
it2-z
it1
42.特征点i的沉降变形速率计算:
43.δvh
qn(mz-rh)
=δh
i(t2-t1)
/(t
2-t1)=(z
it2-z
it1
)/(t
2-t1)
44.(2)特征点i的水平收敛数值计算:
45.(2.1)当特征点单位坐标系y轴正向与隧道测量坐标系y轴正向一致时,即两者的夹角γ=0度时,支护结构变形计算结果如下:
46.特征点i的水平收敛数值计算:
47.δx
i(t2-t1)
=x
it2-x
it1
48.特征点i的水平收敛速率计算:
49.δvx
i(t2-t1)
=δx
i(t2-t1)
/(t
2-t1)=(x
it2-x
it1
)/(t
2-t1)
50.特征点i的轴向变形数值计算:
51.δy
i(t2-t1)
=y
it2-y
it1
52.特征点i的轴向变形速率计算:
53.δvy
i(t2-t1)
=δy
i(t2-t1)
/(t
2-t1)=(y
it2-y
it1
)/(t
2-t1)
54.(2.2)当特征点单位坐标系y轴正向与隧道测量坐标系y轴正向存在夹角时,即两
者的夹角γ≠0度时,支护结构变形计算结果如下:
55.δl=((δx
i(t2-t1)
)2+(δy
i(t2-t1)
)2)
0.5
56.δ=arctan(δx
i(t2-t1)
/δy
i(t2-t1)
)
57.θ=180
°‑
γ-δ
58.δx'=δl*sinθ
59.δy'=δl*cosθ
60.上述式中:
61.δl代表特征点在变形前后坐标点的连线长度;
62.γ代表特征点单位坐标系y轴正向与隧道测量坐标系y轴正向的夹角;
63.δ代表特征点变形前后坐标点连线与隧道测量坐标系y轴负方向的夹角;
64.θ代表特征点变形前后坐标点连线与监测散点单位坐标系y轴正向的夹角;
65.δx'代表特征点单位坐标系x轴方向的位移值,也即特征点的水平收敛值,此时特征点的水平收敛速率为δx'/(t
2-t1);
66.δy'代表特征点单位坐标系y轴方向的位移值,也即特征点的轴向位移值,此时特征点的轴向位移速率为δy'/(t
2-t1)。
67.前述的方法,根据累计变形数值、变形速率判断监测情况,并通过后台处理系统预设支护结构变形风险判定准则以及相应的预警等级、自动应急措施,进行检测预警;
68.1)累计变形数值判断准则:
69.若监测散点的累计变形数值小于1/3预留变形量,则视为安全,正常监测;
70.若监测散点的累计变形数值介于1/3~2/3预留变形量之间时,自动将监测频率提高一倍,并通过监测设备的无线通信设施给项目相关负责人发出提醒信号;
71.若监测散点的累计变形数值大于2/3预留变形量之间时,自动将监测频率提高二倍,并通过监测设备的无线通信设施给项目相关负责人发出风险预警信号;
72.2)变形速率判断准则:
73.若监测散点的变形速率小于0.2mm/d,则视为安全,正常监测;
74.若监测散点的变形速率介于0.2mm/d~1mm/d之间时,应自动将监测频率提高一倍,并通过监测设备的无线通信设施给项目相关负责人发出提醒信号;
75.若监测散点的变形速率大于1mm/d时,自动将监测频率提高二倍,并通过监测设备的无线通信设施给项目相关负责人发出风险预警信号。
76.与现有技术比较,本发明公开的一种基于散点拟合测量的隧道自动化监控测量设备及方法,其包括能在隧道内纵向自由移动的监测台车,在监测台车上设有多件与后台处理系统相连的激光射线装置,多件激光射线装置按设定程序协同对支护结构拱顶至拱脚全范围进行相对密集的点激光巡回测量工作,进而通过监测散点的坐标信息拟合得到特定监测断面的轮廓形状;再通过后台处理系统提取监测断面相应特征点的坐标信息并进行坐标换算,可得到施工过程所需要的支护结构变形数据;将相关变形数据与预先制定的支护结构变形风险判定准则进行匹配分析,进而发出对应等级的预警信息,并自动采取相适应的应急监测措施,可实现隧道的全方位实时监测及预警。本发明通过监测台车与激光射线装置的协同合作,可实现一套激光射线装置对监测台车至掌子面动态区间的自动化监测效果;同时采用免棱镜的测量技术,监测过程无需设置反光标识,其操作简便,可靠性强,功能
齐全,推广性高。
77.本发明的有益效果是:
78.(1)本发明利用激光射线装置的自动点激光监测功能,通过密集的监测散点覆盖支护结构拱顶至拱脚整个范围,进而通过内插计算的方法拟合出特定监测断面的断面形状,可以相对精准的反映出支护结构的变形情况。同时,通过提取出监测断面相关特征点的坐标信息和监测时间,进而计算得到任一监测时间段内特征点的沉降变形数据、水平收敛数据及轴向变形数据,可有效反映支护结构的变形情况,从而指导现场施工;
79.(2)本发明结构简单,投入成本较低,其对所依附的监测台车性能要求较低,仅要求台车结构可靠,能够停放稳固,可提供用来固定激光射线装置的立柱或横梁,且台车能随着隧道掘进向前推进即可,通过监测台车及安装在其上激光射线装置的纵向前移运动,可实现一套监测系统对台车至掌子面动态区段的通测效果,投入的激光射线装置数量低,而激光射线装置的主要部件为激光射线头,其制造成本低廉,所需的使用成本可控,具有良好的经济实用性;
80.(3)操作简单,对监测人员要求较低,通过点激光测量+后台处理系统实现自动采集、计算和分析结果的自动化处理,当监测结果超过风险预判标准后则可以按预定程序发出预警信息并采用应急监测措施,可在大大减少人力投入的同时,有效提高施工安全性;
81.(4)操作灵活性好,其采用免棱镜的测量技术,监测过程中不需要在支护结构上设置反光标识,可以通过设备后台灵活设定监测断面的间距及特征点的数量,从而最大程度的满足现场施工对监测断面的需求,所能提供的监测方案灵活多样,通用性强;
82.(5)操作便捷性高,采用纵向监测的模式,设备监测方向与隧道轴向呈小角度相交,摄像头视线和激光射线因贴近支护结构侧不易被施工机械遮挡,监测过程中受隧道内施工作业的干扰较小,可有效保障了自动化监测工作的有效时长;
83.(6)设备功能齐全,本发明还可通过在后台处理系统输入坐标信息,进而通过激光射线装置激光摄像头的指向功能将相应坐标点的空间位置指示出来,具备一定的施工辅助功能。
84.本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
附图说明
85.为了使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步的详细描述,其中:
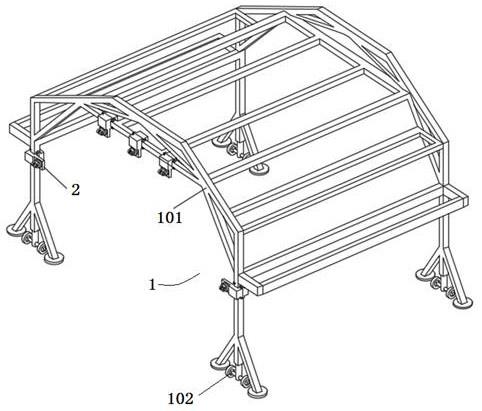
86.图1为本发明的结构示意图。
87.图2为连接板203设置在连接座202左侧的结构示意图。
88.图3为连接板203设置在连接座202右侧的结构示意图。
89.图4为连接板203设置在连接座202下部的结构示意图。
90.图5为防爆套筒3的安装示意图。
91.图6为本发明的监测示意图。
92.图7为激光射线装置激光射线偏角示意图。
93.图8为监测散点变形数值坐标换算参数示意图。
94.图9为激光射线装置纵向角度调整示意图。
95.图10为激光射线装置测量散点布置及测量线路示意图。
具体实施方式
96.以下将参照附图,对本发明的优选实施例进行详细的描述。应当理解,优选实施例仅为了说明本发明,而不是为了限制本发明的保护范围。
97.如图1-图5所示,
98.一种基于散点拟合测量的隧道自动化监控测量设备,其包括能在隧道内纵向自由移动的监测台车1,在监测台车1上设有多件激光射线装置2,所述激光射线装置2与后台处理系统电信相连;所述激光射线装置2用于对支护结构拱顶至拱脚全范围进行相对密集的点激光巡回测量工作,采集监测散点的坐标信息,所述后台处理系统用于通过监测散点的坐标信息拟合得到特定监测断面的轮廓形状,并提取相应特征点的坐标信息并进行坐标换算,可得到施工过程所需要的支护结构变形数据;当变形情况超过预先设定的情况时,则可自动发出预警信息。
99.所述监测台车1为专用监控量测台车,其包括与隧道轮廓相对应的拱形桁架101,拱形桁架101底部设有行走机构102。
100.所述拱形桁架101包括由横梁和若干顶梁、纵梁、斜撑相互拼接构成的支撑架,所述的支撑架应比常规的防水板台车、二衬台车的结构框架大,以保证行车通道的畅通,并尽量避免监测台车1与施工车辆的磕碰事件;支撑架底端通过立柱与三角形支撑脚连接,所述行走机构102及振动监测仪器设置在三角形支撑脚中部。
101.所述激光射线装置2为多件环形布设在拱形桁架101的前侧面上,以实现对监测台车1前方隧道轮廓的全方位检测。优选地,所述激光射线装置2为至少五个设置,其安装在拱形桁架101的横梁和立柱且分别与隧道拱顶、拱腰和拱脚位置相对应。具体地,其中三件激光射线装置对应布设在横梁中部及左右侧,用于监测隧道拱顶、拱腰位置;另外两件激光射线装置对应布设在左右侧的立柱上,用于监测隧道拱脚位置。
102.所述激光射线装置2包括激光射线头201,激光射线头201通过能实现其横向偏角和竖向偏角两个方向自由度调节的固定架与拱形桁架101相连接。
103.所述固定架包括与拱形桁架101的杆件套接的连接座202,在连接座202上设有连接板203,连接板203上转动连接有平转转盘204,在平转转盘204上设有铰座205,激光射线头201通过竖转转轴206铰接在铰座205上;所述平转转盘204和竖转转轴206均与后台处理系统相连,平转转盘204可用于调节数据采集装置的横向角度;竖转转轴206用于调节数据采集装置的竖向角度。具体地,使用时通过平转转盘204和竖向转轴206的配合,由后台处理系统远程程序化操控,可实现激光射线头201横向偏角、竖向偏角两个方向自由度的远程自动化调整,激光射线装置的灵活度极高。
104.所述后台处理系统还与控制监测台车1移动的远程遥控器相连。通过遥控器控制监测台车沿隧道纵向移动,即可实现沿隧道纵向上的移动式监测。
105.所述连接座202由两半锚固块通过螺栓2021拼接而成,在两半锚固块的对接面处
设有两半拼接而成的卡槽,所述卡槽与拱形桁架101的杆件相适配,与使两半锚固块通过卡槽卡固在拱形桁架101的杆件上。
106.根据数据采集装置在拱形桁架101的安装位置,所述连接板203分别对应设置在连接座202下部和左、右侧,以保证连接板204在拱形桁架101的内测,并且连接板203与其中一半锚固块为一体式结构。
107.所述的平转转盘204贯穿连接板203并且其背后设置有坐标靶点,坐标靶点用于辅助定位激光射线装置2的坐标点,通过坐标靶点,人工操作全站仪等测量仪器从监测台车1后方测量得到各激光射线装置的绝对坐标值。
108.此外,监测台车上安装有振动监测仪器,当振动监测仪器感应到监测台车被碰撞移位时,即时发出碰撞移位信号给隧道监控量测负责人员,监控量测负责人员组织相关人员检查监测台车的停放情况,并重新量测各台激光射线装置2的坐标点位,并进行坐标修正。
109.还包括防爆套筒3,防爆套筒3可嵌套在所述平转转盘204外部,作为激光射线头201的保护装置。
110.如图6-图10所示,
111.一种基于散点拟合测量的隧道自动化监控测量方法,其包括以下步骤:
112.s1、根据现场施工需要,在隧道支护结构表面设置多个监测分区;
113.s2、通过巡检方式对监测分区进行相对密集的点激光巡回测量工作,采集监测散点的坐标信息,并通过监测散点的坐标信息拟合得到特定监测断面的轮廓形状;
114.s3、获取特定监测断面轮廓形状上特定特征点在不同时间点的坐标信息,计算出所需要的初期支护变形数据;
115.s4、制定相应的支护结构变形风险判定准则,以及相应的预警等级、自动应急措施。
116.步骤s1中,所述监测分区沿隧道纵向设置多环,每环上的监测分区沿隧道轮廓拱顶至拱脚全范围设置,并且相邻监测分区的纵向位置一一相对,使其构成多条纵向监测区。
117.优选地,每环上的监测分区一般可分为隧道拱顶位置的拱顶环向分区、两侧拱腰及边墙上部位置的拱腰环向分区、两侧边墙下部及拱脚位置的拱脚环向分区;并且各个环向分区之间设有搭接区域,从而保证监测区域覆盖隧道拱顶至拱脚的全部区域。优选地,所述的隧道监测分区可按-50~10度、-10~70度、50~130度、110~190度、170~230度设置。
118.步骤s2中,采集隧道测量坐标系以及监测散点的单位坐标系,所述的隧道测量坐标系与项目的施工控制网坐标系保持一致,以确保测量结果的通用性;所述的监测散点的单位坐标系以监测散点所在线位的切线线路方向为y轴的正向,竖直方向为z轴方向,其后根据右手定律确定x轴方向;
119.通过免棱镜的测量技术,在监测过程无需设置反光标识,而是在与激光射线装置相连的后台处理系统内设置相关监测散点的分布规律,采用带有激光射线头的激光射线装置按相应的分布规律进行点激光巡回测量,得到密集的点坐标,并用其拟合特定断面的隧道轮廓形状,通过多个拟合得到的断面轮廓形状进一步拟合得到三维的隧道空间形状;
120.具体步骤如下:
121.s2.1、针对每道纵向监测区,设置与之位置相对的激光射线装置,对各台激光射线
装置进行编号,采用全站仪测量得到各台激光射线装置的绝对坐标值(x
qm
,y
qm
,z
qm
),x
qm
、y
qm
、z
qm
分别为激光射线装置q在监测台车第m次移动位置上x、y、z坐标值;
122.s2.2、监测过程中,有次序的调整激光射线装置的横向偏角β和竖向偏角α,使得监测散点相对均匀的分布在支护结构上;
123.s2.3、首先按固定数值调整横向偏角β进行监测分区的一环测点的测量工作,再按不固定角度ζ调整纵向偏角β,使得激光射线装置进入下一环测点位置并进行点激光测量,循环往复,直至完成整个监测区域的一循环监测工作,记录激光射线装置q在监测台车第h移位位置、第m循环监测中,第n环向测线,第k监测散点的监测信息:t
qhmnk-(x
qh
+a
qhmnk
,y
qh
+b
qhmnk
,z
qh
+c
qhmnk
)
124.其中,(x
qh
,y
qh
,z
qh
)为监测台车第h移位位置激光射线装置q的绝对坐标,
125.a
qhmnk
、b
qhmnk
、c
qhmnk
分别为x、y、z轴方向对应的监测变量,
126.a
qhmnk
=l
qhmnk
×
cosα
qhmnk
sinβ
qhmnk
,
127.b
qhmnk
=l
qhmnk
×
cosα
qhmnk
cosβ
qhmnk
,
128.c
qhmnk
=l
qhmnk
×
sinα
qhmnk
,
129.l
qhmnk
为对应的激光射线的距离长度,t
qhmnk
为对应的监测时间,
130.α
qhmnk
为对应的竖向偏角,
131.β
qhmnk
为对应的横向偏角。
132.s2.4、采用内插的方式,根据前后相邻两条环向测线拟合构建两条环向测线之间特定断面的隧道轮廓形状,使多个拟合的隧道轮廓形状的纵向间距相等;而在隧道轮廓形状上,特定坐标点的坐标信息为前后环向测线上对应监测散点坐标的平均值。
133.步骤2.2中,采用先调整横向角度,后调整纵向角度的监测散点布置方式,可使得相邻监测散点的监测时间差相对最小,具体调控过程为:
134.(1)初始状态下,纵向角度归零至90度,横向角度调整至所属环向分区横向偏角的中间值(如在-50~10度分区,则横向偏角调整为-20度),并测量巡回监测的测量偏距为dq;
135.(2)横向角度调整至分区横向偏角的下限数值(如-50~10度监测分区的激光射线装置的横向角度归零至-50度),进行点激光测量,其后按固定数值逐步调整横向偏角至分区横向偏角的上限数值,每个调整点均进行点激光测量工作(如-50~10度监测分区的激光射线装置的横向角度逐步调整至10度),此时完成第一纵向角度断面的全部测量工作;再按不固定角度ζ调整纵向偏角至下一个数值,继续进行点激光测量;循环往复
…
136.(3)当纵向偏角调整到极限值并完成测量后,一次性调整激光射线装置返回初始状态,即纵向角度归零至90度,横向角度归零至分区横向偏角的下限数值,并继而开始下一巡回监测工作。
137.其中,在步骤(2)中,横向偏角的调整固定数可以为1度~5度,根据实际需要由后台程序设定;
138.纵向偏角的不固定角度ζ计算公式为:
139.ζ1=arctan(b/dq)
140.ζ2=arctan(2*b/dq)-ζ1141.…
142.ζn=arctan(n*b/dq)-ζ
(n-1)
143.式中,b为相邻环监测散点的纵向间距,根据实际需要由后台处理系统设定。
144.在步骤(3)中,纵向角度从90度调整到极限值即完成一循环的监测工作,其中当激光射线的纵向偏角减小到一定数值以后,激光射线已经照射到掌子面上,此时激光射线装置应能识别出上述情况,并继而终止该监测循环,从而减少不必要的监测行为;
145.具体识别判定准则如下:当调整了纵向角度后,调整前后监测散点在单位坐标系y轴方向的位移值差值δy',为了避免特殊情况,可取调整前5个测点的平均值与调整后5个测点的平均值进行对比,若δy'<0.5b,则认为激光射线已经照射在掌子面上,即可结束该循环监测工作,一次性调整激光射线装置返回初始状态(纵向角度归零至90度,横向角度归零至分区横向偏角的下限数值),并继而开始下一巡回监测工作,其中,δy'为监测散点在单位坐标系y轴方向的位移值,具体计算公式如下:
146.δy'=δl*cosθ
147.δl=((δx
(m-n)
)2+(δy
(m-n)
)2)
0.5
148.θ=180
°‑
γ-δ
149.δ=arctan(δx
(m-n)
/δy
(m-n)
)
150.式中:θ代表监测散点变形前后坐标点连线与监测散点单位坐标系y轴的夹角;
151.γ为前一个监测散点单位坐标系y轴正向与隧道测量坐标系y轴正向的夹角;
152.δ代表监测散点变形前后坐标点连线与隧道测量坐标系y轴负方向的夹角;
153.δx
(m-n)
为监测点在隧道测量坐标系x轴方向的变形值,δy
(m-n)
为监测点在隧道测量坐标系y轴的变形值,其计算过程如下:
154.假定激光射线装置的坐标信息(x,y,z),通过点激光测量得到测量点的坐标为(x+a,y+b,z+c),其中:
155.a=l
×
cosαsinβ
156.b=l
×
cosαcosβ
157.c=l
×
sinα
158.同一激光发射点在循环内的测点逐个进行排序,则两个不同测点的坐标值为(x+am,y+bm,z+cm)和(x+an,y+bn,z+cn);
159.两个测点在x轴的差值为:δx
(m-n)
=(x+am)-(x+an)=a
m-an160.两个测点在y轴的差值为:δy
(m-n)
=(y+bm)-(y+bn)=b
m-bn161.式中:l为点激光测量时激光测线的长度。
162.针对步骤s2.3、现以拱顶环向分区、拱腰环向分区、拱脚环向分区为例,采集相关监测散点的坐标信息:
163.对各台激光射线装置进行编号,采用全站仪测量得到各台激光射线装置在监测台车第一移动位置的绝对坐标值,即激光射线装置ⅰ的绝对坐标(x
11
,y
11
,z
11
)、激光射线装置ⅱ的绝对坐标(x
21
,y
21
,z
21
)
…
,
164.按上述方法,获取监测台车后续移动位置下的各激光射线装置的绝对坐标(x
12
,y
12
,z
12
)、(x
22
,y
22
,z
22
)
…
,(x
13
,y
13
,z
13
)、(x
23
,y
23
,z
23
)
…
,
…
,(x
1m
,y
1m
,z
1m
)、(x
2m
,y
2m
,z
2m
)
…
;
165.在监测台车第一移位位置,激光射线装置ⅰ的激光射线对拱部50~130度范围进行点激光测量,对准测量点的横向偏角记录为β
11111
,纵向偏角记录为α
11111
,激光射线的距离长度为l
11111
以及监测时间点t
11111
,其中第一个下标对应激光射线装置的标号,第二个下标
对应台车移位次数的编号,第三个下标对应循环监测的序列号,第四个下标对应环向测线的序列号,第五个下标对应环向测线内监测散点的序列号;
166.根据激光射线装置ⅰ的绝对坐标信息(x
11
,y
11
,z
11
),通过计算监测散点坐标为(x
11
+a
11111
,y
11
+b
11111
,z
11
+c
11111
),其中:
167.a
11111
=l
11111
×
cosα
11111
sinβ
11111
;
168.b
11111
=l
11111
×
cosα
11111
cosβ
11111
;
169.c
11111
=l
11111
×
sinα
11111
;
170.记录激光射线装置ⅰ在监测台车第一移位位置、第一循环监测中,第一环向测线,第一监测散点的监测信息:t
11111-(x
11
+a
11111
,y
11
+b
11111
,z
11
+c
11111
);
171.其后纵向角度不变,逐步调整横向角度:
172.记录激光射线装置ⅰ在监测台车第一移位位置、第一循环监测中,第一环向测线,第k监测散点的监测信息:t
1111k-(x
11
+a
1111k
,y
11
+b
1111k
,z
11
+c
1111k
);
173.横向角度由下限值调整到上限值后,调整纵向角度,使得激光至下一环向测线:
174.记录激光射线装置ⅰ在监测台车第一移位位置、第一循环监测中,第n环向测线,第k监测散点的监测信息:t
111nk-(x
11
+a
111nk
,y
11
+b
111nk
,z
11
+c
111nk
);
175.第一循环监测完成后,调整激光射线装置返回初始状态,进行下一循环测量:
176.记录激光射线装置ⅰ在监测台车第一移位位置、第m循环监测中,第n环向测线,第k监测散点的监测信息:t
11mnk-(x
11
+a
11mnk
,y
11
+b
11mnk
,z
11
+c
11mnk
);
177.第一移动位置测量完毕,移动到下一个位置继续测量:
178.记录激光射线装置ⅰ在监测台车第h移位位置、第m循环监测中,第n环向测线,第k监测散点的监测信息:t
1hmnk-(x
1h
+a
1hmnk
,y
1z
+b
1hmnk
,z
1h
+c
1hmnk
);
179.同理可得其他激光射线装置的监测信息:
180.记录激光射线装置q在监测台车第h移位位置、第m循环监测中,第n环向测线,第k监测散点的监测信息:t
qhmnk-(x
qh
+a
qhmnk
,y
qz
+b
qhmnk
,z
qh
+c
qhmnk
)。
181.步骤2.4中,由于测量偏距dq为平均值,与多数测点的真实偏距存在细微的误差,且实际隧道线路并不一定为直线,通过上述方法算得的纵向角度的调整间隔并不能实现相邻环监测散点的横向同断面、纵向等间距效果,需要通过内插计算的方式进一步拟合出多道隧道净空断面形状,且隧道净空断面形状的纵向间距相等,多道隧道净空断面形状即可以反映隧道的整体变形情况,
182.其中,拟合构建隧道净空形状的具体过程如下:
183.(1)根据点激光测量得到的监测散点拟合构建多道纵向间距为b的监测断面轮廓形状,构建断面所选用的监测散点为所构建断面前后相邻环监测散点,拟合断面的坐标参数为参与拟合监测散点坐标信息的内插值,时间参数可取参与拟合监测散点监测时间的平均值,上述拟合得到的监测断面即为散点拟合测量工作得到的结果输出监测断面;
184.(2)根据拟合得到的监测断面轮廓形状,可提取断面内拱顶、拱腰和拱脚位置特征点的坐标信息和时间参数,拟合特征点的坐标参数根据监测断面轮廓形状计算得到,时间参数可取该净空断面的监测时间,拟合监测断面上述特征点即为散点拟合测量的结果输出特征点。
185.步骤s3中,得到特定特征点多个时间点的坐标信息后,进行对应时间段内支护结
构的变形情况进行计算分析,具体过程如下:
186.第i特征点在t1的监测信息:i-(x
it1
,y
it1
,z
it1
)-t1;
187.第i特征点在t2的监测信息:i-(x
it2
,y
it2
,z
it2
)-t2;
188.(1)特征点i的沉降变形数值计算:
189.δh
i(t2-t1)
=z
it2-z
it1
190.特征点i的沉降变形速率计算:
191.δvh
qn(mz-rh)
=δh
i(t2-t1)
/(t
2-t1)=(z
it2-z
it1
)/(t
2-t1)
192.(2)特征点i的水平收敛数值计算:
193.(2.1)当特征点单位坐标系y轴正向与隧道测量坐标系y轴正向一致时,即两者的夹角γ=0度时,支护结构变形计算结果如下:
194.特征点i的水平收敛数值计算:
195.δx
i(t2-t1)
=x
it2-x
it1
196.特征点i的水平收敛速率计算:
197.δvx
i(t2-t1)
=δx
i(t2-t1)
/(t
2-t1)=(x
it2-x
it1
)/(t
2-t1)
198.此外,还可以提取出特征点i沿隧道轴向的变形情况:
199.特征点i的轴向变形数值计算:
200.δy
i(t2-t1)
=y
it2-y
it1
201.特征点i的轴向变形速率计算:
202.δvy
i(t2-t1)
=δy
i(t2-t1)
/(t
2-t1)=(y
it2-y
it1
)/(t
2-t1)
203.(2.2)当监测散点单位坐标系y轴正向与隧道测量坐标系y轴正向存在夹角时,即两者的夹角γ≠0度时,支护结构变形计算结果如下:
204.δl=((δx
i(t2-t1)
)2+(δy
i(t2-t1)
)2)
0.5
205.δ=arctan(δx
i(t2-t1)
/δy
i(t2-t1)
)
206.θ=180
°‑
γ-δ
207.δx'=δl*sinθ
208.δy'=δl*cosθ
209.上述式中:
210.δl代表特征点在变形前后坐标点的连线长度;
211.γ代表特征点单位坐标系y轴正向与隧道测量坐标系y轴正向的夹角,通过提前在与激光射线装置相连的后台处理系统中输入隧道路线信息及隧道尺寸信息,软件即可自动测算出隧道轮廓线任何一点的γ;
212.δ代表特征点变形前后坐标点连线与隧道测量坐标系y轴负方向的夹角;
213.θ代表特征点变形前后坐标点连线与监测散点单位坐标系y轴正向的夹角;
214.δx'代表特征点垂直切线方向的位移值,也即监测散点的水平收敛值,此时监测散点的水平收敛速率为δx'/(t
2-t1);
215.δy'代表监测散点平行切线方向的位移值,也即监测散点的轴向位移值,此时监测散点的轴向位移速率为δy'/(t
2-t1)。
216.步骤4中,通过与激光射线装置相连的后台处理系统,提前制定多种支护结构变形风险判定准则以及相应的预警等级、自动应急措施,若监测过程中出现监测数据超出任一
一种风险判定准则时,立即按预定的程序发出预警信息,并采取预定的应急程序:
217.1)累计变形数值判断准则:
218.若监测散点的累计变形数值小于1/3预留变形量,则视为安全,激光射线装置正常监测;
219.若监测散点的累计变形数值介于1/3~2/3预留变形量之间时,应通过激光射线装置的无线通信设施给项目相关负责人发出提醒信号,并自动将监测频率提高一倍;
220.若监测散点的累计变形数值大于2/3预留变形量时,应通过激光射线装置的无线通信设施给项目相关负责人发出风险预警信号,并自动将监测频率提高二倍;
221.2)变形速率判断准则:
222.若监测散点的变形速率小于0.2mm/d,则视为安全,激光射线装置正常监测;
223.若监测散点的变形速率介于0.2mm/d~1mm/d之间时,应通过激光射线装置的无线通信设施给项目相关负责人发出提醒信号,并自动将监测频率提高一倍;
224.若监测散点的变形速率大于1mm/d时,应通过激光射线装置的无线通信设施给项目相关负责人发出风险预警信号,并自动将监测频率提高二倍;
225.可根据现场实际情况制定其他的风险判定准则。
226.当需要出具监控量测报告时,除提供具体的监测数据外,还可以以监测时间为横坐标,累计变形值为纵坐标,拟合出特点监测散点的沉降变形曲线和水平收敛曲线;或者通过某一特定监测时刻多个监测散点的坐标数据,拟合出某一特定时间点的隧道三维结构模型,并可以通过两个特定时间点隧道三维结构模型的体积差异立体呈现隧道结构的空间变形情况。
227.另外,还可以借助激光射线装置的激光射线指向功能,通过在后台处理系统中预设某一特定坐标位置,并操控激光射线装置的激光射线在隧道内标示出相应的点位,可在一定程度上用于辅助施工。
228.以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式保密的限制,任何未脱离本发明技术方案内容、依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1