一种基于混合策略的移动机器人路径规划方法
1.本发明涉及移动机器人路径规划技术领域,尤其涉及一种基于混合策略的移动机器人路径规划方法。
背景技术:
2.移动机器人是集环境感知、动态决策与规划、行为控制与执行等多功能于一体的综合系统,既为基础产业向节能、节资、高效、环境友好型产业转变提供解决方案,又为构建智能、便捷、舒适、有活力的社会提供高质量的服务,已融入人类社会,成为人们的万能伙伴,改变人类的生产、生活和思维方式,其应用领域不断扩大和使用数量不断提高。移动机器人路径规划的相关研究,一直是学术界与工程界的研究热点。
3.目前,移动机器人路径规划中采用原始a*算法进行避障路径规划,缺乏改进融合策略,存在着搜索区域面积大、冗余节点过多、转折次数多、搜索时间长等问题,增加了路径长度,降低搜索效率。
技术实现要素:
4.为了克服现有移动机器人路径规划中采用原始a*算法进行避障路径规划,缺乏改进融合策略,存在着搜索区域面积大、冗余节点过多、转折次数多、搜索时间长等问题,增加了路径长度,降低搜索效率等缺陷;本发明基于融合策略,先对a*算法中启发函数预估代价使用加权重构策略模块,获得初始规划路径,减少搜索区域;再对初始规划路径使用三点优化策略模块,去除冗余节点和减少转折次数,获得第一次优化规划路径,但出现在障碍物边缘上路径节点;再对第一次优化规划路径使用单位外切圆策略模块,调整在障碍物边缘上路径节点,获得第二次优化规划路径,并输出。
5.本发明具体解决其技术问题所采用的技术解决方案是:
6.一种基于混合策略的移动机器人路径规划方法,包括起始点,浅灰色单位小正方形;白色单位小正方形,黑色矩形,黑色折线一,目标点,黑色折线二,黑色折线三,黑色折线四,原始a*算法,混合策略,加权重构策略模块,三点优化策略模块,单位外切圆策略模块,原始a*算法规划路径,原始a*算法规划路径的长度,原始a*算法规划路径的搜索区域的面积,初始规划路径,第一次优化规划路径,第二次优化规划路径,第二次优化规划路径的长度,第二次优化规划路径的搜索区域的面积;加权重构系数α,delete表,节点个数n,起始节点,表达式为f(n)=g(n)+αh(n)的改进a*算法;n为当前节点;f(n)为从起始点经过当前节点n到达目标点的估计代价值;g(n)为起始点到当前节点n的实际代价值; h(n)为当前节点n到目标点的启发函数预估代价值;其中,浅灰色单位小正方形组成的区域为搜索区域,白色单位小正方形组成的区域为未搜索区域,黑色矩形区域为障碍物,黑色折线一为原始a*算法规划路径,黑色折线二为初始规划路径,黑色折线三为第一次优化规划路径,黑色折线四为第二次优化规划路径;混合策略分解成加权重构策略模块、三点优化策略模块和单位外切圆策略模块三个阶段;
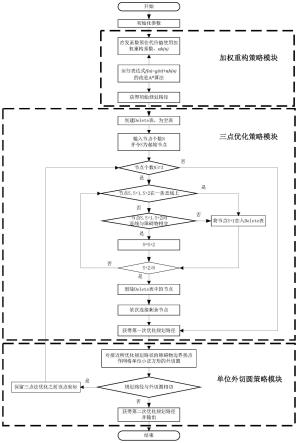
7.一种基于混合策略的移动机器人路径规划方法具体流程步骤如下:
8.步骤1,开始,初始化参数;
9.步骤2,运行加权重构策略模块;
10.步骤2.1,使用加权重构系数α;
11.步骤2.2,运行表达式为f(n)=g(n)+αh(n)的改进a*算法;
12.步骤2.3,获得初始规划路径;
13.步骤3,运行三点优化策略模块;
14.步骤3.1,创建delete表,为空表;
15.步骤3.2,输入节点个数n,并令s为起始节点;
16.步骤3.3,判断节点个数n≥3是否成立,如果是,则继续往下执行,否则跳至步骤3.11;
17.步骤3.4,判断节点s、s+1、s+2是否在一直线上,如果是,则跳至步骤3.6,否则继续往下执行;
18.步骤3.5,判断节点s、s+1、s+2间连线与障碍物是否相交,如果是,则跳至步骤3.7,否则继续往下执行;
19.步骤3.6,将节点s+1加入delete表;
20.步骤3.7,令s=s+2;
21.步骤3.8,判断s+2》n是否成立,如果是,则继续往下执行,否则跳转至步骤3.4;
22.步骤3.9,删除delete表中的节点;
23.步骤3.10,从起始点至目标点,依次连接剩余节点;
24.步骤3.11,获得第一次优化规划路径;
25.步骤4,运行单位外切圆策略模块;
26.步骤4.1,对接近所优化规划路径的障碍物边界拐点作网格单位小正方形的外切圆;
27.步骤4.2,判断规划路径与所有单位小正方形的外切圆是否相切,如果是,则继续往下执行,否则跳至步骤4.4;
28.步骤4.3,保留三点法优化之前该点坐标,并跳转至步骤3.3;
29.步骤4.4,获得第二次优化规划路径,,并输出第二次优化规划路径的长度和第二次优化规划路径的搜索区域的面积;
30.步骤5,一种基于混合策略的移动机器人路径规划方法结束。
31.第二次优化规划路径的长度比原始a*算法规划路径的长度短,第二次优化规划路径的搜索区域的面积比原始a*算法规划路径的搜索区域的面积小,第二次优化规划路径的节点数比原始a*算法规划路径的节点数少。
32.本发明的有益效果是,基于融合策略,先对a*算法中启发函数预估代价使用加权重构策略模块,获得初始规划路径,减少搜索区域;再对初始规划路径使用三点优化策略模块,去除冗余节点和减少转折次数,获得第一次优化规划路径,但出现在障碍物边缘上路径节点;再对第一次优化规划路径使用单位外切圆策略模块,调整在障碍物边缘上路径节点,获得第二次优化规划路径并输出,解决了目前移动机器人路径规划中采用原始a*算法进行避障路径规划,缺乏改进融合策略,存在着搜索区域面积大、冗余节点过多、转折次数多、搜
索时间长等问题,增加了路径长度,降低搜索效率等问题。它概念简单,实现方便,减少搜索区,去除冗余节点和减少转折次数,适应于移动机器人避障的规划路径行业实际需求。
附图说明
33.图1为本发明一种基于混合策略的移动机器人路径规划方法的流程图;
34.图2为原始a*算法运行的效果图;
35.图3为本发明一种基于混合策略的移动机器人路径规划方法的加权重构策略模块运行的效果图;
36.图4为本发明一种基于混合策略的移动机器人路径规划方法的三点优化策略模块运行的效果图;
37.图5为本发明一种基于混合策略的移动机器人路径规划方法的混合策略运行的效果图。
38.图中201.起始点,202.浅灰色单位小正方形,203.白色单位小正方形,204. 黑色矩形,205.黑色折线一,206.目标点,301.黑色折线二,401.黑色折线三, 501.黑色折线四。
具体实施方式
39.下面结合附图和实施例对本发明专利作进一步地说明:
40.本发明所提供的一种基于混合策略的移动机器人路径规划方法,包括起始点 201,浅灰色单位小正方形202;白色单位小正方形203,黑色矩形204,黑色折线一205,目标点206,黑色折线二301,黑色折线三401,黑色折线四501,原始a*算法,混合策略,加权重构策略模块,三点优化策略模块,单位外切圆策略模块,原始a*算法规划路径,原始a*算法规划路径的长度,原始a*算法规划路径的搜索区域的面积,原始a*算法规划路径的节点数,初始规划路径,第一次优化规划路径,第二次优化规划路径,第二次优化规划路径的长度,第二次优化规划路径的搜索区域的面积,第二次优化规划路径的节点数;加权重构系数α,delete表,节点个数n,起始节点,表达式为f(n)=g(n)+αh(n)的改进a*算法;n为当前节点;f(n)为从起始点201经过当前节点n到达目标点206的估计代价值;g(n)为起始点201到当前节点n的实际代价值;h(n)为当前节点n到目标点206的启发函数预估代价值;其中,浅灰色单位小正方形202组成的区域为搜索区域,白色单位小正方形203组成的区域为未搜索区域,黑色矩形204区域为障碍物,黑色折线一205为原始a*算法规划路径,黑色折线二301为初始规划路径,黑色折线三401为第一次优化规划路径,黑色折线四501为第二次优化规划路径;混合策略分解成加权重构策略模块、三点优化策略模块和单位外切圆策略模块三个阶段;
41.一种基于混合策略的移动机器人路径规划方法具体流程步骤如下:
42.步骤1,开始,初始化参数;
43.步骤2,运行加权重构策略模块;
44.步骤2.1,使用加权重构系数α;
45.步骤2.2,运行表达式为f(n)=g(n)+αh(n)的改进a*算法;
46.步骤2.3,获得初始规划路径;
47.步骤3,运行三点优化策略模块;
48.步骤3.1,创建delete表,为空表;
49.步骤3.2,输入节点个数n,并令s为起始节点;
50.步骤3.3,判断节点个数n≥3是否成立,如果是,则继续往下执行,否则跳至步骤3.11;
51.步骤3.4,判断节点s、s+1、s+2是否在一直线上,如果是,则跳至步骤3.6,否则继续往下执行;
52.步骤3.5,判断节点s、s+1、s+2间连线与障碍物是否相交,如果是,则跳至步骤3.7,否则继续往下执行;
53.步骤3.6,将节点s+1加入delete表;
54.步骤3.7,令s=s+2;
55.步骤3.8,判断s+2》n是否成立,如果是,则继续往下执行,否则跳转至步骤3.4;
56.步骤3.9,删除delete表中的节点;
57.步骤3.10,从起始点201至目标点206,依次连接剩余节点;
58.步骤3.11,获得第一次优化规划路径;
59.步骤4,运行单位外切圆策略模块;
60.步骤4.1,对接近所优化规划路径的障碍物边界拐点作网格单位小正方形的外切圆;
61.步骤4.2,判断规划路径与所有单位小正方形的外切圆是否相切,如果是,则继续往下执行,否则跳至步骤4.4;
62.步骤4.3,保留三点法优化之前该点坐标,并跳转至步骤3.3;
63.步骤4.4,获得第二次优化规划路径,并输出第二次优化规划路径的长度和第二次优化规划路径的搜索区域的面积;
64.步骤5,一种基于混合策略的移动机器人路径规划方法结束。
65.每当需要执行一种基于混合策略的移动机器人路径规划方法时,先运行“移动机器人路径规划的原始a*算法”,获得原始a*算法规划路径,附图2,原始 a*算法规划路径的长度为39.0个单位,原始a*算法规划路径的搜索区域的面积为182个单位,原始a*算法规划路径的节点数为40个单位;再运行“加权重构策略模块”,获得初始规划路径,附图3;再运行“加权重构策略模块”和“三点优化策略模块”,获得第一次优化规划路径,附图4;再运行“加权重构策略模块”、“三点优化策略模块”和“单位外切圆策略模块”,即运行混合策略,获得第二次优化规划路径,并输出规划路径,附图5,第二次优化规划路径的长度为35.6个单位,第二次优化规划路径的搜索区域的面积为112个单位,第二次优化规划路径的节点数9个单位;原始a*算法运行的效果和混合策略运行的效果对比,第二次优化规划路径的长度比原始a*算法规划路径的长度短,第二次优化规划路径的搜索区域的面积比原始a*算法规划路径的搜索区域的面积小,第二次优化规划路径的节点数比原始a*算法规划路径的节点数少,去除冗余节点和提高搜索效率。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1