自动卫星站跟踪方法、装置及存储介质与流程
1.本文件涉及自动卫星站指向控制、信号检测及电机控制技术领域,尤其涉及一种自动卫星站跟踪方法、装置及存储介质。
背景技术:
2.目前大多数卫星覆盖较好,可采用信标或者dvb实现目标卫星跟踪。但是有些地区卫星信号覆盖较差,部分卫星为了节省资源,不提供信标,导致在这些地区跟星非常困难或无法跟踪。
3.另外由于在某些紧急任务,现场使用时需要跟踪某颗特定的卫星,由于任务的突发性,导致无法准确获取卫星频率等相关参数,也会导致无法跟星。
4.因此,为了有效的解决上述跟踪难得问题,迫切需要有一种有效的方法来实现跟踪。
技术实现要素:
5.本发明的目的在于提供一种自动卫星站跟踪方法、装置及存储介质,旨在解决现有技术中的上述问题。
6.本发明提供一种自动卫星站跟踪方法,包括:
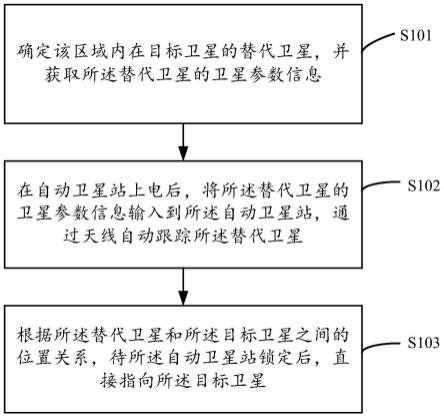
7.确定该区域内在目标卫星的替代卫星,并获取所述替代卫星的卫星参数信息;
8.在自动卫星站上电后,将所述替代卫星的卫星参数信息输入到所述自动卫星站,通过天线自动跟踪所述替代卫星;
9.根据所述替代卫星和所述目标卫星之间的位置关系,待所述自动卫星站锁定后,直接指向所述目标卫星。
10.本发明提供一种自动卫星站跟踪装置,包括:
11.确定获取模块,用于确定该区域内在目标卫星的替代卫星,并获取所述替代卫星的卫星参数信息;
12.输入跟踪模块,用于在自动卫星站上电后,将所述替代卫星的卫星参数信息输入到所述自动卫星站,通过天线自动跟踪所述替代卫星;
13.计算跟踪模块,用于根据所述替代卫星和所述目标卫星之间的位置关系,待所述自动卫星站锁定后,直接指向所述目标卫星。
14.本发明实施例还提供一种自动卫星站跟踪装置,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现上述自动卫星站跟踪方法的步骤。
15.本发明实施例还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有信息传递的实现程序,所述程序被处理器执行时实现上述自动卫星站跟踪方法的步骤。
16.采用本发明实施例,在无任何成本增加情况下,可实现对较低信号或者无信标卫星,以及对卫星参数不了解情况下实现天线快速、精准跟踪。
附图说明
17.本发明的目的是针对卫星覆盖薄弱区域跟星困难及无信标卫星的快速跟踪问题,本发明提供一种跟踪策略和方法来实现自动卫星站快速跟踪。
18.为了更清楚地说明本说明书一个或多个实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本说明书中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
19.图1是本发明实施例的自动卫星站跟踪方法的流程图;
20.图2是本发明实施例的自动卫星站跟踪示意图;
21.图3是本发明实施例的跟星策略的流程图;
22.图4是本发明装置实施例一的自动卫星站跟踪装置的示意图;
23.图5是本发明装置实施例二的自动卫星站跟踪装置的示意图。
具体实施方式
24.为了使本技术领域的人员更好地理解本说明书一个或多个实施例中的技术方案,下面将结合本说明书一个或多个实施例中的附图,对本说明书一个或多个实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本说明书的一部分实施例,而不是全部的实施例。基于本说明书一个或多个实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都应当属于本文件的保护范围。
25.方法实施例
26.根据本发明实施例,提供了一种自动卫星站跟踪方法,图1是本发明实施例的自动卫星站跟踪方法的流程图,如图1所示,根据本发明实施例的自动卫星站跟踪方法具体包括:
27.步骤101,确定该区域内在目标卫星的替代卫星,并获取所述替代卫星的卫星参数信息;其中,可以将在目标卫星一定范围内相对目标卫星容易跟踪的卫星和/或有信标信息的卫星确定为替代卫星;
28.所述卫星参数信息具体包括以下至少之一:卫星纬度、频率、符号率。
29.步骤102,在自动卫星站上电后,将所述替代卫星的卫星参数信息输入到所述自动卫星站,通过天线自动跟踪所述替代卫星;具体包括如下处理:设置所述替代卫星的频率给所述自动卫星站,使用所述替代卫星的经度和当地地理位置信息计算理论方位、理论俯仰、以及理论极化,并将方位、俯仰、极化运动到理论位置,搜索并锁定所述替代卫星。
30.步骤103,根据所述替代卫星和所述目标卫星之间的位置关系,待所述自动卫星站锁定后,直接指向所述目标卫星。具体包括如下处理:
31.使用所述目标卫星的经度和当地地理位置信息计算所述目标卫星的理论方位、理论俯仰、以及理论极化,并将极化运动到所述目标卫星的理论极化位置;
32.计算所述替代卫星和所述目标卫星的理论方位差值,并控制电机运动差值角度,运动到所述目标卫星的实际方位位置;
33.计算所述替代卫星和所述目标卫星的理论俯仰差值,并控制电机运动差值角度,运动到所述目标卫星的实际俯仰位置,完成所述目标卫星的跟踪。
34.以下结合附图,对本发明实施例的上述技术方案进行详细说明。
35.如图2所示,为了实现在上述区域、卫星及异常情况的卫星跟踪,首先确定该区域内目标卫星附近相对比较容易跟踪的卫星纬度、频率、符号率等信息,然后自动卫星站上电后,将目标卫星附近容易跟踪卫星参数输入到卫星站里面,天线自动跟踪到目标卫星附近这颗容易跟踪卫星,然后根据两颗卫星之间的位置关系,待卫星站锁定后,直接指向目标卫星。从图2可知,卫星2为目标卫星,卫星1为目标卫星附近较容易跟踪的或者有信标信息的卫星。在实际跟踪时可以先跟踪卫星1,待卫星锁定后,根据两个卫星之间关系直接指向目标卫星2。
36.如图3所示,跟踪策略实现方法及策略如下:
37.1)设置卫星1频率给卫星站;
38.2)使用卫星1经度和当地地理位置信息计算理论方位、理论俯仰、理论极化,然后将方位、俯仰、极化运动到理论位置;
39.3)搜索卫星1;
40.4)锁定卫星1;
41.5)使用卫星2(目标星)经度和当地地理位置信息计算卫星2理论方位、理论俯仰、理论极化;
42.6)极化运动到卫星2理论极化位置;
43.7)计算卫星1和卫星2理论方位差值,并控制电机运动差值角度,运动到卫星2(目标星)实际方位位置;
44.8)计算卫星1和卫星2理论俯仰差值,并控制电机运动差值角度,运动到卫星2(目标星)实际俯仰位置;
45.9)目标星跟踪完成。
46.综上所述,本发明实施例的上述技术方案可以在卫星通信控制系统中使用;支持无信标跟踪和卫星覆盖较弱的跟踪;扩展性强,可适用于车载静中通卫星天线、车载动中通天线及船载天线;实现简单,相对传统卫星天线不增加任何成本、适合大规模推广。
47.装置实施例一
48.根据本发明实施例,提供了一种自动卫星站跟踪装置,图4是本发明实施例的自动卫星站跟踪装置的示意图,如图4所示,根据本发明实施例的自动卫星站跟踪装置具体包括:
49.确定获取模块40,用于确定该区域内在目标卫星的替代卫星,并获取所述替代卫星的卫星参数信息;所述确定获取模块40具体用于:
50.将在目标卫星一定范围内相对目标卫星容易跟踪的卫星和/或有信标信息的卫星确定为替代卫星;所述卫星参数信息具体包括以下至少之一:卫星纬度、频率、符号率。
51.输入跟踪模块42,用于在自动卫星站上电后,将所述替代卫星的卫星参数信息输入到所述自动卫星站,通过天线自动跟踪所述替代卫星;所述输入跟踪模块42具体用于:
52.设置所述替代卫星的频率给所述自动卫星站,使用所述替代卫星的经度和当地地理位置信息计算理论方位、理论俯仰、以及理论极化,并将方位、俯仰、极化运动到理论位置,搜索并锁定所述替代卫星;
53.计算跟踪模块44,用于根据所述替代卫星和所述目标卫星之间的位置关系,待所
述自动卫星站锁定后,直接指向所述目标卫星。
54.计算跟踪模块44具体用于:
55.使用所述目标卫星的经度和当地地理位置信息计算所述目标卫星的理论方位、理论俯仰、以及理论极化,并将极化运动到所述目标卫星的理论极化位置;
56.计算所述替代卫星和所述目标卫星的理论方位差值,并控制电机运动差值角度,运动到所述目标卫星的实际方位位置;
57.计算所述替代卫星和所述目标卫星的理论俯仰差值,并控制电机运动差值角度,运动到所述目标卫星的实际俯仰位置,完成所述目标卫星的跟踪。
58.本发明实施例是与上述方法实施例对应的系统实施例,各个模块的具体操作可以参照方法实施例的描述进行理解,在此不再赘述。
59.装置实施例二
60.本发明实施例提供一种自动卫星站跟踪装置,如图5所示,包括:存储器 50、处理器52及存储在所述存储器50上并可在所述处理52上运行的计算机程序,所述计算机程序被所述处理器52执行时实现如方法实施例中所述的步骤。
61.装置实施例二
62.本发明实施例提供一种计算机可读存储介质,所述计算机可读存储介质上存储有信息传输的实现程序,所述程序被处理器52执行时实现如方法实施例中所述的步骤。
63.本实施例所述计算机可读存储介质包括但不限于为:rom、ram、磁盘或光盘等。
64.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1