评估激光雷达点云拖点程度的方法、测试装置及激光雷达与流程
本技术属于激光雷达,尤其涉及一种评估激光雷达点云拖点程度的方法、测试装置、激光雷达以及计算机可读存储介质。
背景技术:
1、激光雷达是一种用激光器作为发射光源、采用光电探测技术手段的主动探测设备。它可以通过激光信号收发的时间差确定与目标物的距离。近年来,激光雷达因其探测性能好、体积小及重量轻等优势,被广泛应用于自动驾驶、交通通讯、无人机、智能机器人、资源勘探等领域。
2、拖点(towing point)作为激光雷达常见问题之一,一直受到用户的关注,拖点的存在会降低点云质量,影响用户算法对障碍物的判断,或导致细小物体的消失,这成为室内测绘的难点,因此减少拖点成为激光雷达急需攻克的难点之一。
技术实现思路
1、有鉴于现有技术的一个或多个缺陷,本发明提供一种评估激光雷达点云拖点程度的方法,包括:
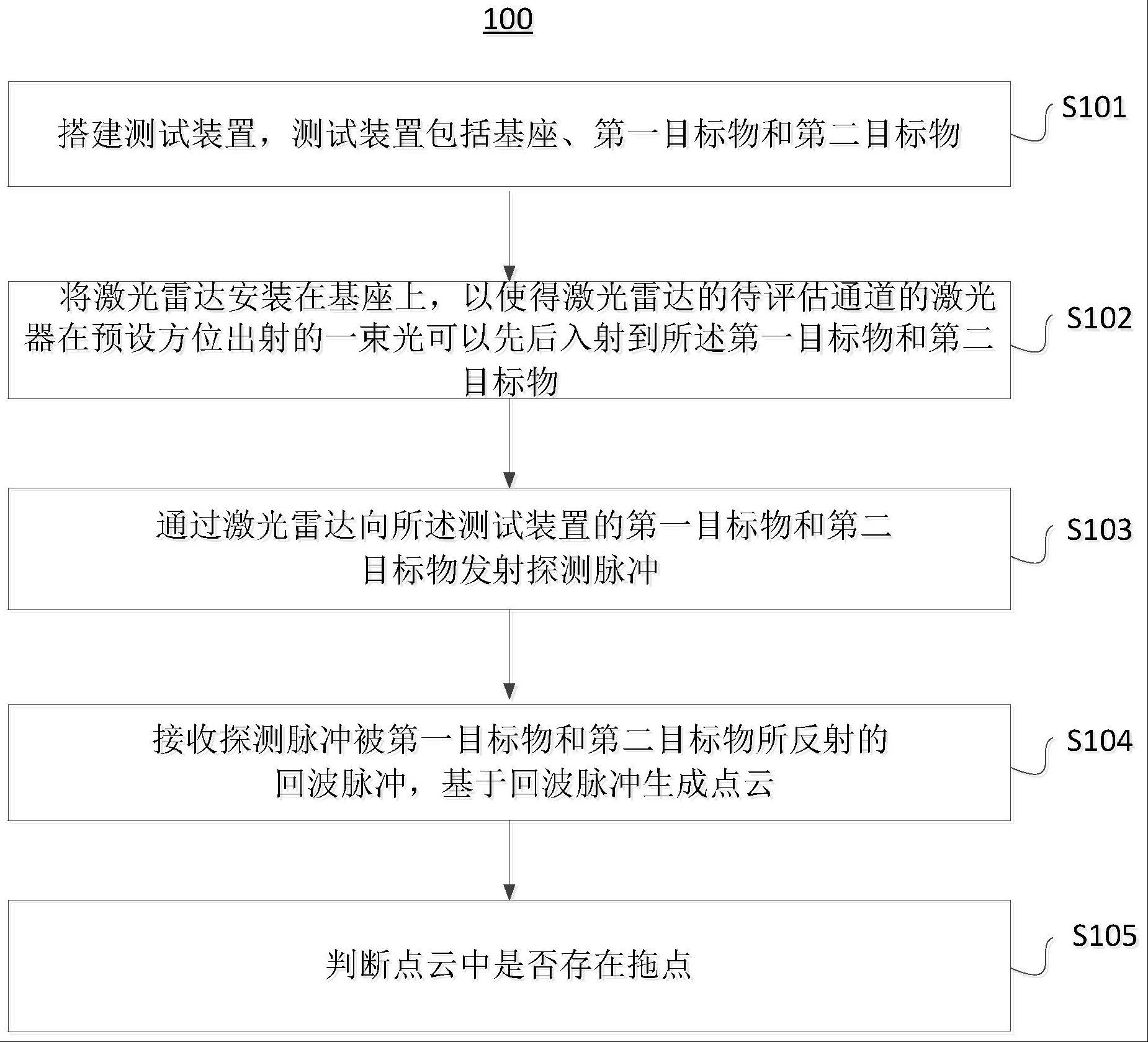
2、s101:搭建测试装置,所述测试装置包括基座、第一目标物和第二目标物,所述第一目标物和第二目标物与所述基座之间的距离不同;
3、s102:将所述激光雷达安装在所述基座上,以使得激光雷达在预设方位出射的光可以先后入射到所述第一目标物和第二目标物;
4、s103:通过激光雷达向所述测试装置的第一目标物和第二目标物发射探测脉冲;
5、s104:接收所述探测脉冲被所述第一目标物和第二目标物所反射的回波脉冲,基于所述回波脉冲生成点云;
6、s105:判断所述点云中是否存在拖点;
7、s106:当所述点云中存在拖点时,增大所述第一目标物和第二目标物之间的距离目标物目标物。
8、根据本发明的一个方面,所述方法还包括:重复所述步骤s103-s106,直至所述点云中不存在拖点,记录此时所述第一目标物和第二目标物之间的距离,用以表征所述激光雷达点云拖点程度,
9、其中所述步骤s102包括:调整所述第一目标物和第二目标物与基座的距离和方位,使得从所述激光雷达的一个激光发射器发出的探测脉冲被第一目标物和第二目标物反射的回波脉冲由所述激光雷达的同一个探测器接收。
10、根据本发明的一个方面,所述方法还包括:重复所述步骤s103-s106,直至所述点云中不存在拖点;通过拖点数量相对于所述第一目标物和第二目标物之间的距离的曲线来表征所述激光雷达点云拖点程度,
11、其中所述第一目标物和第二目标物具有平直的边缘,并且所述第一目标物和第二目标物设置成使得所述激光雷达发出的水平探测脉冲基本垂直地入射到边缘附近的部位。
12、根据本发明的一个方面,所述步骤s101包括:在与所述基座相距第一距离处放置第一目标物,在与所述基座相距第二距离处放置第二目标物,以使从所述激光雷达的角度观察,所述第一目标物和第二目标物部分重叠,其中所述第一目标物和第二目标物设置成可覆盖所述激光雷达的垂直视场。
13、根据本发明的一个方面,所述第一目标物和第二目标物为反射率相同的朗伯体。
14、根据本发明的一个方面,所述步骤s103包括:所述激光雷达正对所述第一目标物的边缘处发射探测脉冲,以使发出的光一部分入射到所述第一目标物,另一部分入射到所述第二目标物。
15、根据本发明的一个方面,所述步骤s105包括:通过点云可视化设备显示所述点云,以判断所述点云中的第一目标物和第二目标物之间是否存在拖点。
16、根据本发明的一个方面,所述第一目标物和第二目标物相距预设的距离,其中所述第一目标物和第二目标物的初始位置配置成使得在所述点云中存在拖点,所述步骤s106包括:当确定所述点云中存在拖点时,将所述第二目标物朝着远离所述基座的方向移动。
17、根据本发明的一个方面,所述方法还包括:改变所述第一目标物和/或第二目标物的反射率,重复所述步骤s103-s106。
18、根据本发明的一个方面,当所述点云中不存在拖点时所述第一目标物和第二目标物之间的距离与所述激光雷达发射的探测脉冲的脉宽有关,所述距离不小于100cm。
19、根据本发明的一个方面,所述方法还包括:当所述点云中不存在拖点时所述第一目标物和第二目标物之间的距离大于第一预设距离时,判断所述点云中的拖点程度高。
20、根据本发明的一个方面,所述方法还包括:根据所述第一目标物和第二目标物之间距离的变化,绘制所述拖点数的曲线图。
21、本发明还提供一种用于评估激光雷达点云拖点程度的测试装置,所述测试装置包括:
22、基座,用于在其上安装所述激光雷达;
23、第一目标物,垂直放置在与所述基座相距第一距离处;
24、第二目标物,垂直放置在与所述基座相距第二距离处,其中所述第二距离大于第一距离,
25、其中从所述激光雷达的角度观察,所述第一目标物和第二目标物部分重叠。
26、根据本发明的一个方面,所述测试装置还包括:点云可视化设备,所述点云可视化设备用于与所述激光雷达通讯以显示所述点云。
27、根据本发明的一个方面,所述测试装置还包括控制单元,其中所述控制单元配置成控制所述第一目标物和第二目标物的位置,以根据所述点云中是否存在拖点或者根据用户输入来调整所述第一目标物和第二目标物之间的距离。
28、根据本发明的一个方面,所述测试装置还包括第一导轨和第二导轨,其中所述第一目标物可滑动地设置在所述第一导轨上,所述第二目标物可滑动地设置在所述第二导轨上。
29、根据本发明的一个方面,所述第一目标物和第二目标物与基座的距离和方位设置成使得从激光雷达的一个激光发射器发出的探测脉冲被第一目标物和第二目标物反射的回波脉冲由所述激光雷达的同一个探测器接收。
30、根据本发明的一个方面,所述第一目标物和第二目标物具有平直的边缘,并且所述第一目标物和第二目标物设置成使得所述激光雷达发出的水平探测脉冲基本垂直地入射到边缘附近的部位,所述第一目标物和第二目标物设置成可覆盖所述激光雷达的垂直视场。
31、本发明还提供一种激光雷达,包括:
32、发射单元,配置成发射探测脉冲;
33、接收单元,配置成接收所述探测脉冲入射到障碍物所反射的回波脉冲;和
34、处理单元,配置成基于所述回波脉冲生成点云数据,并评估所述点云数据中拖点的程度,其中,所述拖点为形成于前后现实障碍物之间的不存在的点,所述拖点程度采用拖点消失距离表征。
35、根据本发明的一个方面,所述拖点消失距离与所述激光雷达发射的探测脉冲的脉宽有关,所述拖点消失距离不小于100cm。
36、根据本发明的一个方面,所述处理单元还配置成将所述拖点程度打包至所述点云数据,并输出至外部设备,以辅助所述外部设备判断所述点云数据的质量,所述外部设备包括车辆。
37、根据本发明的一个方面,所述处理单元还配置成根据所述拖点程度,评估所述点云数据的置信度,并输出至外部设备,以辅助所述外部设备决策所述点云数据的使用,所述外部设备包括车辆。
38、本发明还提供一种计算机可读存储介质,包括存储于其上的计算机可执行指令,所述可执行指令在被处理器执行时实施如上所述的评估激光雷达点云拖点程度的方法。
39、采用本发明的技术方案,能够非常直观且标准统一的评估任一厂家生产的激光雷达的拖点程度,从而评估激光雷达点云的置信度,进而评估所述激光雷达的性能,以辅助外部设备决策所述点云数据的使用,有利于提升客户体验,规范激光雷达行业的发展。
- 还没有人留言评论。精彩留言会获得点赞!