一种分体式飞机自校靶和辅助起飞系统及方法与流程
1.本发明涉及但不局限于飞机校靶与辅助起飞技术领域,尤指一种分体式飞机自校靶和辅助起飞系统及方法。
背景技术:
2.惯导、雷达等机载设备安装后需进行校靶工作,校靶是指利用测量仪器对机载设备轴线与飞机机体轴线的姿态关系进行标定和补偿校正。现阶段,主要采用的校靶手段包括激光自准直校靶和基于惯性测量组件惯性组件模块的校靶方法。激光自准直校靶,需对飞机进行“顶水平”后,利用激光准直原理实现设备安装基准与飞机轴线角度的测量,工作过程复杂、操作难度大、人力成本也较高。
3.基于惯性测量组件惯性组件模块的校靶方法,不需要对飞机进行“顶水平”,通过在机体表面布置多个观测点,拟合出机体坐标系,并与地理系方位进行统一;惯性测量组件模块集成激光发射窗口,设备安装基准通过高精度工装进行等效引出,惯性测量组件模块与局部基准进行准直,通过地理系传递,实现机体与机载设备相对姿态的测量。基于惯性测量组件惯性组件模块的校靶方法,虽然不需要对飞机进行“顶水平”,但是引入惯性测量设备,仍需要进行光轴准直操作,使用灵活性较低。
4.对准是惯导工作前初始位置的装订过程。现阶段,航向对准时间长,通常是若干分钟,是制约惯导性能提升的难点问题。而新一代飞机对于快速起飞具有强烈需求,因此寻求一种技术方法,实现地理系下飞机姿态的高精度测量,对于辅助惯导对准,提升惯导性能具有重要意义。
5.综上,寻求一种测量方法,既能够实现高精度校靶,同时实现机体姿态高精度测量,辅助惯导对准,对于简化地面任务操作难度、降低地面设备成本、提升飞机保障效率具有重要意义。
技术实现要素:
6.本发明的目的:提供一种分体式飞机自校靶和辅助起飞系统及方法,在校靶时实现对机体坐标系、任务载荷安装基准坐标系的测量与构建,计算出机体坐标系与任务载荷安装坐标系之间的姿态偏差;在辅助起飞时,测量系统具有自主敏感地理系的能力,通过测量与构建机体坐标系,得到机体系相对于地理系的航向角,实现航向快速对准。
7.本发明的技术方案:为了实现上述发明目的,根据本发明的第一方面,提出一种分体式飞机自校靶和辅助起飞系统,包括第一测量模块,第二测量模块,光学合作标志,工装;所述测量模块和所述测量模块布置于机体同一侧面,飞机前后起落架舱和设备维护舱内分别布置有所述光学合作标志,机载设备安装基准通过所述工装引出,所述第一测量模块与所述第二测量模块通讯连接;所述第一测量模块和所述第二测量模块组成双目测量系统,用于对所述光学合作标志的三维坐标进行测量。
8.在一个可能的实施例中,所述第一测量模块包括第一惯性测量组件、第一相机、第
一图像处理单元和数据处理单元;所述第一惯性测量组件与所述第一相机相对姿态经过标定,所述第一惯性测量组件、第一相机分别与所述第一图像处理单元和数据处理单元通信连接;所述第二测量模块包括第二惯性测量组件、第二相机、第二图像处理单元和数据处理单元;所述第二惯性测量组件与所述第二相机相对姿态经过标定,所述第二惯性测量组件、第二相机分别与所述第二图像处理单元和数据处理单元通信连接。
9.在一个可能的实施例中,所述光学合作标志与飞机机体系的相对位置关系已知,可用于构造飞机机体坐标系。
10.在一个可能的实施例中,所述光学合作标志可选用点光源、可反光涂料标志点中的一种。
11.根据本发明的第二方面,提出一种分体式飞机自校靶和辅助起飞方法,采用上述的一种分体式飞机自校靶和辅助起飞系统,其特征在于,包括如下步骤:
12.步骤1:所述第一相机与所述第二相机对光学合作标志、工装进行拍摄成像;
13.步骤2:所述第一图像处理单元和数据处理单元和所述第二图像处理单元和数据处理单元分别通过图像特征识别、提取算法对所述第一相机与所述第二相机拍摄的光学合作标志进行提取和定位;
14.步骤3:所述第一图像处理单元和数据处理单元和所述第二图像处理单元和数据处理单元分别将光学合作标志在图像上的定位信息带入位姿估计算法,完成光学合作标志与所述第一相机与所述第二相机之间姿态关系的求解。
15.在一个可能的实施例中,所述第一惯性测量组件和第二惯性测量组件可用于敏感地理系,实现对地理系方向的高精度测量;所述第一惯性测量组件测量地理系后可传递给所述第一相机,实现第一相机坐标系与地理系的统一;所述第二惯性测量组件测量地理系后可传递给所述第二相机,实现所述第二相机坐标系与地理系的统一;
16.所述第一相机和第二相机的坐标系经地理系传递后,可实现所述第一相机和第二相机坐标系的统一。
17.在一个可能的实施例中,所述第一惯性测量组件、第一相机两者坐标系之间的姿态关系通过标定获得,所述第二惯性测量组件、第二相机两者坐标系之间的关系通过标定获得。
18.在一个可能的实施例中,在所述步骤3中,具体包括如下步骤:
19.步骤301:所述第一惯性测量组件与第一相机之间的相对姿态关系记为所述第二惯性测量组件与第二相机之间的相对姿态关系记为
20.步骤302:所述第一惯性测量组件和所述第二惯性测量组件分别对地理系进行测量,得到所述第一惯性测量组件与地理系之间的姿态关系为所述第二惯性测量组件与地理系之间的姿态关系为
21.步骤303:根据坐标系传递关系可得分体式飞机自校靶和辅助起飞系统坐标系与地理系之间的关系为:
[0022][0023]
步骤304:在校靶过程中,机体系与分体式飞机自校靶和辅助起飞系统坐标系之间
的关系为所述工装坐标系与分机自校靶和辅助起飞系统坐标系之间的关系为可得到校靶结果:
[0024][0025]
步骤305:在辅助起飞过程中,飞机航向测量结果为:
[0026][0027]
本发明的优点:
[0028]
1:通过将惯性测量组件与相机集成,使得视觉传感器具备自主敏感地理坐标系的能力,可将视觉测量坐标系方向与地理系方向进行统一,进而可用地理系实现测量基准的传递。
[0029]
2:针对传统视觉测量方法基线固定,测量范围有限的问题,分体式测量方法可有效避免基线对测量范围的限制,扩展测量系统的工作范围,满足大尺寸飞机的测量需求。
[0030]
3:可实现飞机地面自校靶与航向快速测量的功能。
附图说明:
[0031]
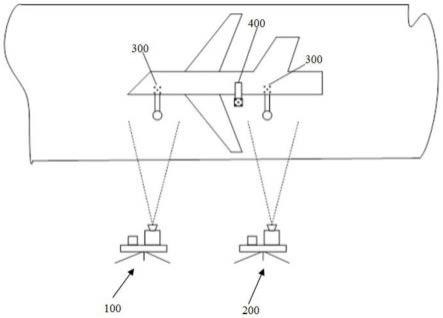
图1为本发明优选实施例一种分体式飞机自校靶和辅助起飞系统组成示意图
[0032]
图2为本发明优选实施例第一测量模块结构示意图
[0033]
图3为本发明优选实施例第二测量模块结构示意图
具体实施方式:
[0034]
下面结合附图对本发明做进一步详细描述。
[0035]
如图1所示,一种分体式飞机自校靶和辅助起飞系统,包括第一测量模块100,第二测量模块200,光学合作标志300,工装400;所述测量模块100和所述测量模块200布置于机体同一侧面,飞机前后起落架舱和设备维护舱内分别布置有所述光学合作标志300,机载设备安装基准通过所述工装400引出,所述第一测量模块100与所述第二测量模块200通讯连接;
[0036]
所述第一测量模块100和所述第二测量模块200组成双目测量系统,用于对所述光学合作标志300的三维坐标进行测量;
[0037]
所述光学合作标志300与飞机机体系的相对位置关系已知,可用于构造飞机机体坐标系;
[0038]
所述工装400用于对机载设备的安装基准进行引出,可代替设备安装基准。
[0039]
如图2所示,所述第一测量模块100包括第一惯性测量组件101、第一相机102、第一图像处理单元和数据处理单元103;所述第一惯性测量组件101与所述第一相机102相对姿态经过标定,所述第一惯性测量组件101、第一相机102分别与所述第一图像处理单元和数据处理单元103通信连接;如图3所示,所述第二测量模块200包括第二惯性测量组件201、第二相机202、第二图像处理单元和数据处理单元203;所述第二惯性测量组件201与所述第二相机202相对姿态经过标定,所述第二惯性测量组件201、第二相机202分别与所述第二图像处理单元和数据处理单元203通信连接;
[0040]
所述第一惯性测量组件101和第二惯性测量组件201可用于敏感地理系,实现对地理系方向的高精度测量;
[0041]
所述第一相机102和所述第二相机202用于对所述光学合作标志300进行成像;
[0042]
所述第一测量模块100的测量坐标系与所述第一相机102坐标系一致,所述第二测量模块200的测量坐标系与所述第二相机202坐标系一致;
[0043]
所述第一惯性测量组件101、第一相机102两者坐标系之间的姿态关系通过标定获得,所述第二惯性测量组件201、第二相机202两者坐标系之间的关系通过标定获得;
[0044]
所述第一惯性测量组件101测量地理系后可传递给所述第一相机102,实现第一相机102坐标系与地理系的统一;所述第二惯性测量组件201测量地理系后可传递给所述第二相机202,实现所述第二相机202坐标系与地理系的统一;所述第一相机102和第二相机202的坐标系经地理系传递后,可实现所述第一相机102和第二相机202坐标系的统一。
[0045]
进一步的,所述第一相机102和第二相机202的坐标系通过地理系传递后,可获得所述第一相机102和第二相机202之间的相对姿态关系;第一相机102坐标系作为分体式测量系统的工作坐标系,所述第一相机102和第二相机202分别对光学合作标志300进行拍摄成像,并利用光学合作标志300已经确定的尺寸信息,采用双目测量的方法可完成对光学合作标志300三维坐标的精确测量。
[0046]
在一个可能的实施例中,所述光学合作标志300的三维坐标测得后,利用所述光学合作标志300与飞机机体系关系已知的先决条件,可得到分体式自校靶系统和辅助起飞系统坐标系与飞机机体坐标系之间的相对位姿关系。
[0047]
优选地,所述光学合作标志300可选用点光源、可反光涂料标志点中的一种。
[0048]
根据本发明的第二方面,提出一种分体式飞机自校靶和辅助起飞方法,采用上述的一种分体式飞机自校靶和辅助起飞系统,其特征在于,包括如下步骤:
[0049]
步骤1:所述第一相机102与所述第二相机202对光学合作标志300、工装400进行拍摄成像;
[0050]
步骤2:所述第一图像处理单元和数据处理单元103和所述第二图像处理单元和数据处理单元203分别通过图像特征识别、提取算法对所述第一相机102与所述第二相机202拍摄的光学合作标志进行提取和定位;
[0051]
步骤3:所述第一图像处理单元和数据处理单元103和所述第二图像处理单元和数据处理单元203分别将光学合作标志在图像上的定位信息带入位姿估计算法,完成光学合作标志300与所述第一相机102与所述第二相机202之间姿态关系的求解。
[0052]
在一个可能的实施例中,所述第一惯性测量组件101和第二惯性测量组件201可用于敏感地理系,实现对地理系方向的高精度测量;所述第一惯性测量组件101测量地理系后可传递给所述第一相机102,实现第一相机坐标系与地理系的统一;所述第二惯性测量组件201测量地理系后可传递给所述第二相机202,实现所述第二相机坐标系与地理系的统一;
[0053]
所述第一相机和第二相机的坐标系经地理系传递后,可实现所述第一相机和第二相机坐标系的统一。
[0054]
在一个可能的实施例中,所述第一惯性测量组件、第一相机两者坐标系之间的姿态关系通过标定获得,所述第二惯性测量组件、第二相机两者坐标系之间的关系通过标定获得。
[0055]
在一个可能的实施例中,在所述步骤3中,具体包括如下步骤:
[0056]
步骤301:所述第一惯性测量组件与第一相机之间的相对姿态关系记为所述第二惯性测量组件与第二相机之间的相对姿态关系记为
[0057]
步骤302:所述第一惯性测量组件和所述第二惯性测量组件分别对地理系进行测量,得到所述第一惯性测量组件与地理系之间的姿态关系为所述第二惯性测量组件与地理系之间的姿态关系为
[0058]
步骤303:根据坐标系传递关系可得分体式飞机自校靶和辅助起飞系统坐标系与地理系之间的关系为:
[0059][0060]
步骤304:在校靶过程中,机体系与分体式飞机自校靶和辅助起飞系统坐标系之间的关系为所述工装坐标系与分机自校靶和辅助起飞系统坐标系之间的关系为可得到校靶结果:
[0061][0062]
步骤305:在辅助起飞过程中,飞机航向测量结果为:
[0063]
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1