一种数字车钥匙三维定位方法与流程
1.本发明属于数字车钥匙技术领域,具体为一种数字车钥匙三维定位方法。
背景技术:
2.随着移动终端、汽车、物联网技术的飞速发展,车辆解锁已逐渐从传统的机械钥匙的解锁方式,转变为数字车钥匙的解锁方式。通过数字车钥匙,可以在不使用机械钥匙的情况下解锁和启动汽车。数字车钥匙可以由用户手持或放置在用户的背包中,当数字车钥匙进入解锁车门的适当范围内时,数字车钥匙会被“唤醒”;进入汽车后,系统会检测到数字车钥匙,以激活点火启动按钮。
3.现有技术中,数字车钥匙的定位有基于蓝牙指纹定位实现的,也有基于超宽带(ultra wide band,uwb)技术实现的。基于蓝牙指纹的定位实现,定位精度较低,不能满足高精度需求场景的应用。基于超宽带技术的定位实现,通过精确测量数字钥匙到定位锚点(测距模块)的距离,并通过多个锚点的测距结果来解算数字钥匙的位置,可以提供高精度的位置信息,满足高精度需求场景的应用。
4.现有的基于测距的定位算法,通常是针对区域内定位应用,即被定位设备位于若干个锚点(测距模块)所围成的空间体积内部(区域内定位),对于被定位设备位于若干个锚点(测距模块)所围成的空间体积外部的情况(区域外定位),未见有相关专利。对于区域外定位,其锚点选择方法、位置解算流程和位置数据解算方法都与区域内定位有所不同。
技术实现要素:
5.为解决现有技术存在的缺陷,本发明的目的在于提供一种数字车钥匙三维定位方法,通过该方法能够解决被定位设备位于若干测距模块所围成的空间体积外部的情况。
6.为达到以上目的,本发明采用的一种技术方案是:
7.一种数字车钥匙三维定位方法,基于一种数字车钥匙三维定位系统,所述系统包括n个安装在汽车车身上的测距模块和一个定位计算模块,所述n≥5个;n个所述测距模块用于测量出本测距模块到数字车钥匙的距离;所述定位计算模块汇总一个定位周期时间内所有测距模块的测距结果,对所述数字车钥匙进行位置解算,并将解算出的位置提供给车载控制器;
8.所述方法包括以下步骤:
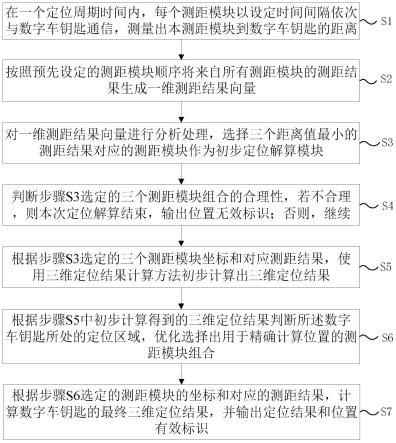
9.s1、在一个定位周期时间内,每个测距模块以设定的时间间隔依次与数字车钥匙通信,测量出本测距模块到所述数字车钥匙的距离;
10.s2、按照预先设定的测距模块顺序将来自所有测距模块的测距结果生成一维测距结果向量;
11.s3、对所述一维测距结果向量进行分析处理,选择三个距离值最小的测距结果对应的测距模块作为初步定位解算模块;
12.s4、判断步骤s3选定的三个测距模块组合的合理性,若不合理,则本次定位解算结
束,输出位置无效标识;否则,继续;
13.s5、根据步骤s3选定的三个测距模块的坐标和对应的测距结果,使用三维定位结果计算方法初步计算所述数字车钥匙的三维定位结果;
14.s6、根据步骤s5中初步计算得到的三维定位结果判断所述数字车钥匙所处的定位区域,优化选择出用于精确计算位置的测距模块组合;
15.s7、根据步骤s6选定的测距模块的坐标和对应的测距结果,计算得到所述数字车钥匙的最终三维定位结果,并输出定位结果和位置有效标识。
16.进一步,如上所述的数字车钥匙三维定位方法,步骤s2中对没有测距结果的测距模块对应位置的数据设置为一个远大于测距有效距离的大值k。
17.进一步,如上所述的数字车钥匙三维定位方法,步骤s3中如果三个最小的测距结果中包括大值k,则本次定位解算结束,输出位置无效标识。
18.进一步,如上所述的数字车钥匙三维定位方法,步骤s4中所述判断三个测距模块组合的合理性具体为:判断步骤s3选定的三个测距模块组合是否在合理备选集范围内,所述合理备选集是根据测距模块在车身上的安装位置,在车身周边不同方向及车内视距可见的预先定义的测距模块组合的集合。
19.进一步,如上所述的数字车钥匙三维定位方法,步骤s5中所述三维定位结果计算方法具体为:
20.s501、定义评价函数,所述评价函数表达式为:
[0021][0022]
其中:(x
i y
i zi)为每个测距模块的坐标,ri为输入的测距模块与到数字车钥匙的距离,n为选定的测距模块的数量;
[0023]
s502、采用函数极值求解方法求出所述评价函数的极值;
[0024]
s503、若所述评价函数的极值大于等于零,则将极值点所对应的坐标(x
m y
m zm)作为计算结果输出;否则,继续;
[0025]
s504、若所述评价函数的极值小于零,采用函数零点求解方法计算出所述评价函数在极值右侧的零点所对应的坐标(x
n y
n zn),将其作为计算结果输出。
[0026]
进一步,如上所述的数字车钥匙三维定位方法,步骤s502中采用的函数极值求解方法包括对分查找法、牛顿迭代法。
[0027]
进一步,如上所述的数字车钥匙三维定位方法,所述测距模块的安装位置包括汽车车身的四个角和座舱内部的适合位置。
[0028]
进一步,如上所述的数字车钥匙三维定位方法,步骤s6中以汽车车身四个角处的测距模块为交点,以连接所述交点的两条横线和两条纵线为分割线,将车身周围的区域分割为九个区域。
[0029]
进一步,如上所述的数字车钥匙三维定位方法,步骤s6中所述优化选择出用于精确计算位置的测距模块组合具体为:根据所述数字车钥匙所处的定位区域,选择出可视范围内的所有测距模块。
[0030]
进一步,如上所述的数字车钥匙三维定位方法,步骤s7中计算所述数字车钥匙的最终三维定位结果具体为:
[0031]
当选定的测距模块数量≥四个时,使用最小二乘法计算出x、y和z,(x yz)即为数
字车钥匙的最终三维定位结果。
[0032]
采用本发明所述的数字车钥匙三维定位方法,具有以下显著的技术效果:
[0033]
本发明通过精确测量数字钥匙到测距模块的距离,通过多个测距模块的测距结果来解算数字钥匙的位置,可解决被定位设备位于若干测距模块所围成的空间体积外部的情况,提供高精度的位置信息,满足高精度需求场景的应用。
附图说明
[0034]
图1是本发明实施例中提供的一种数字车钥匙三维定位系统结构示意图;
[0035]
图2是本发明实施例中测距模块在车身上的安装位置示意图;
[0036]
图3是本发明实施例中提供的一种数字车钥匙三维定位方法流程图;
[0037]
图4是本发明实施例中数字车钥匙的定位区域分割图。
具体实施方式
[0038]
下面结合具体的实施例与说明书附图对本发明进行进一步的描述。
[0039]
图1示出了本发明实施例中提供的一种数字车钥匙三维定位系统结构示意图,数字车钥匙三维定位系统由若干测距模块和定位计算模块组成,对处在其定位范围内的数字车钥匙进行相对于车身坐标系统的定位,并将位置信息提供给车载控制器。
[0040]
汽车车身安装有多个测距模块,为保证汽车周边各个方向都可以实现三维定位,即至少可以同时视距可见三个测距模块,通常安装的测距模块数量大于等于五个。本实施例中,车身安装有五个测距模块,分别位于车身的四个角和车中央位置,如图2所示。每个测距模块以一定的时间间隔依次通过与数字车钥匙间的通信,来测量出本测距模块到数字车钥匙的距离;定位计算模块汇总一个定位周期时间内所有测距模块的测距结果,对数字车钥匙进行位置解算,并将解算出的位置提供给车载控制器。
[0041]
图3示出了本发明实施例中提供的一种数字车钥匙三维定位方法流程图,该方法包括以下步骤:
[0042]
s1、在一个定位周期时间内,每个测距模块以一定的时间间隔依次与数字车钥匙通信,测量出本测距模块到所述数字车钥匙的距离。
[0043]
s2、按照预先设定的测距模块顺序将来自所有测距模块的测距结果生成一维测距结果向量。
[0044]
定位计算模块对来自所有测距模块的测距结果做预处理,按照预先设定的测距模块顺序将测距结果生成一维测距结果向量。在数字车钥匙的位置超出某个测距模块的测距范围或某个测距模块被障碍物遮挡等情况下,该测距模块不能收到测距响应结果,此时对没有测距结果的测距模块对应位置的数据设置为一个远大于测距有效距离的大值k。
[0045]
s3、对一维测距结果向量进行分析处理,选择三个距离值最小的测距结果对应的测距模块作为初步定位解算模块。
[0046]
如果三个最小的测距结果中包括大值k,则本次定位解算结束,输出位置无效标识;否则,继续。
[0047]
s4、判断步骤s3选定的三个测距模块组合的合理性,若不合理,则本次定位解算结束,输出位置无效标识;否则,继续。
[0048]
定位计算模块分析步骤s3选定的三个测距模块的合理性,若不在合理备选集范围内,判定为不合理。合理备选集是根据测距模块在车身上的安装位置,在车身周边不同方向及车内视距可见的预先定义的测距模块组合的集合。例如,模块0、模块1和模块2处在视距同时可见的范围内,故是合理组合,而模块0、模块1和模块4处在视距不能同时可见的范围,故是不合理组合。
[0049]
s5、根据步骤s3选定的三个测距模块的坐标和对应的测距结果,使用三维定位结果计算方法初步计算所述数字车钥匙的三维定位结果。
[0050]
三维定位结果计算方法如下:
[0051]
s501、定义评价函数
[0052]
数字车钥匙的当前坐标点到所选定的测距模块的距离平方之和作为变量一,输入的测距结果平方之和作为变量二,评价函数的值为变量一与变量二之差。经过分析,此评价函数为一个关于高度坐标z的凹函数,并且在极值左侧单调下降,在极值右侧单调上升,但不能确定此函数的极小值是大于零、等于零或小于零。
[0053]
评价函数表达式为:
[0054][0055]
其中:(x
i y
i zi)为选定的每个测距模块的坐标,ri为输入的测距模块到数字车钥匙的距离,n为选定的测距模块的数量。
[0056]
其关于z的偏导数为:
[0057][0058][0059]
其关于z的二阶偏导数为:
[0060][0061]
显然评价函数f关于z的二阶导数大于0,因此f为关于z的凹函数。
[0062]
在假设z已知的情况下,其他两个坐标x、y按如下二元一次方程求解:
[0063][0064]
其中,m1、m2为除0号测距模块外,选择参与位置计算的测距模块的序号。
[0065]
s502、采用函数极值求解方法求出所述评价函数的极值。
[0066]
本发明中不限定使用哪种函数极值求解方法,例如对分查找法、牛顿迭代法等。
[0067]
s503、若所述评价函数的极值大于等于零,则将极值点所对应的坐标(x
m y
m zm)作为计算结果输出;否则,继续。
[0068]
s504、若所述评价函数极值小于零,采用函数零点求解方法计算出所述评价函数在极值右侧的零点所对应的坐标(x
n y
n zn),将其作为计算结果输出。
[0069]
s6、根据步骤s5中初步计算得到的三维定位结果判断所述数字车钥匙所处的定位区域,优化选择出用于精确计算位置的测距模块组合。
[0070]
图4示例出了数字车钥匙的定位区域分割图,以车身四个角处的测距模块为交点,以连接交点的两条横线和两条纵线为分割线,将车身周围的区域分割为九个区域。根据步骤s5计算得出的数字车钥匙的初步三维定位结果,判断出数字车钥匙处于哪个区域,根据当前定位区域,选择出可视范围内的所有测距模块用于精确计算数字车钥匙的最终三维定位结果。例如,当数字车钥匙处于c1区域时,选择测距模块0、测距模块1、测距模块2、测距模块3作为精确解算组合。
[0071]
s7、根据步骤s6选定的测距模块的坐标和对应的测距结果,计算得到数字车钥匙的最终三维定位结果,并输出定位结果和位置有效标识。
[0072]
当选定的测距模块数量≥四个时,使用最小二乘法计算出x、y和z,(x y z)即为数字车钥匙的最终三维定位结果。
[0073]
下面以选择0、1、2、3号四个测距模块为例,说明使用最小二乘法计算出x、y和z的过程。
[0074]
根据测距结果,有如下方程组:
[0075][0076]
整理得:
[0077][0078]
即转化为线性方程组ax=b求解,其中
[0079][0080][0081]
x=[x y z]
t
[0082]
最小二乘(ls)解为x=(a
t
a)-1at
b。
[0083]
下面以车身安装了五个测距模块为例,说明数字车钥匙的位置解算过程。五个测距模块在车身上的安装位置如图2所示。
[0084]
1)定位计算模块对来自所有测距模块的测距结果做预处理,按照测距模块的标号顺序生成一维测距结果向量(r
0 r
1 r
2 r
3 k)。
[0085]
2)根据一维测距结果向量(r
0 r
1 r
2 r
3 k),三个距离值最小的测距结果为r0、r1和r2,所对应的测距模块为模块0、模块1和模块2,且测距结果中不包括大值k。
[0086]
3)模块0、模块1和模块2的组合为合理的定位解算组合。
[0087]
4)根据三个测距模块的坐标(x
0 y
0 z0)、(x
1 y
1 z1)、(x
2 y
2 z2)以及对应的测距结果(r
0 r
1 r2),使用三维定位结果计算方法,得到初步三维定位结果(x
t y
t z
t
)。
[0088]
5)上面的计算结果表明,被定位目标处于c1区域,优化选择测距模块0、测距模块1、测距模块2、测距模块3作为位置解算组合。
[0089]
6)根据上述选定的四个测距模块的坐标(x
0 y
0 z0)、(x
1 y
1 z1)、(x
2 y
2 z2)、(x
3 y
3 z3)以及对应的测距结果(r
0 r
1 r
2 r3),使用三维定位结果计算方法,得到最终三维定位结果(x
f y
f zf)。
[0090]
本发明提供的一种数字车钥匙三维定位方法,通过精确测量数字钥匙到测距模块的距离,并通过多个测距模块的测距结果来解算数字钥匙的位置,可解决被定位设备位于若干测距模块所围成的空间体积外部的情况,提供高精度的位置信息,满足高精度需求场景的应用。
[0091]
上述实施例只是对本发明的举例说明,本发明也可以以其它的特定方式或其它的特定形式实施,而不偏离本发明的要旨或本质特征。因此,描述的实施方式从任何方面来看均应视为说明性而非限定性的。本发明的范围应由附加的权利要求说明,任何与权利要求的意图和范围等效的变化也应包含在本发明的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1