基于侵入式静电传感器阵列的烟气流速场测量系统与方法
1.本发明涉及烟气测量技术领域,具体一种烟气流速的测量方法。
背景技术:
2.燃煤电厂锅炉烟气流速是锅炉运行过程的一项重要运行参数。实现烟气流动速度场的实时准确测量可以为脱硫脱硝试剂与催化剂投放量的准确控制提供参数依据,从而提高烟气脱硫脱硝效率,提升经济效应。另一方面,锅炉烟气排放量也是锅炉污染物排放监测系统的重要指标之一,而烟气流速是计算烟气排放量的重要参数。由于实际的排烟通道尺寸较大且通道存在拐角,烟气流速在烟道截面上分布不均匀,局部烟气存在回流、流场紊乱等问题,使得烟气流速场的准确测量较为困难。尽管目前已提出了很多烟气流速测量方法,但绝大多数方法都只能实现烟道截面单点或某一条线上烟气流速的测量,而使用截面上单点或线测量的烟气速度代表截面真实流速往往误差较大。针对这一问题,目前已有团队提出了分布式多点网格烟气流速测量系统与方法,相较于单点测量方法,分布式多点测量法可以同时测定多个点位的烟气流速,实现了对截面流速更为全面的监测,并且大幅降低了烟气排放量的计算误差。
3.由于分布式多点测量系统与方法所采用的测量传感器多为皮托管,因此该系统也存在与皮托管类似的诸多弊端。皮托管通过测量迎风面与背风面压差测量烟气流速,当实际烟气流速方向与采样方向不一致时,该仪器只能获得烟气在沿采样方向的流速分量,而无法获得实际烟气流速的大小与方向。基于皮托管的分布式多点烟气流速测量系统除无法获得烟气实际流动方向外,当烟气流速较小或测量区域烟气产生回流时,其测量结果的准确性与可靠性都会大幅降低,因此该系统在实际布置测点时会有意避开烟气回流及流速低的区域。
4.静电传感器作为一种较为成熟的传感技术,通常结合互相关法被广泛应用于气固两相流动速度测量领域。锅炉烟气是燃烧废气与粉尘的混合物,其排放过程也是典型的气固两相流动过程,因此静电传感器也可以用于锅炉烟气流速测量。有团队提出使用两个侵入式棒状传感器测量烟道截面的烟气流速,这种方法获得的速度测量值是传感器所在直线上的速度平均值,很显然这种方法获得的烟气流速不能反映真实的烟气流场情况。
技术实现要素:
5.本发明所要解决的技术问题是提出了一种能获取烟气流场分布的测量系统与方法,从而获得烟气流速在某一测量区域内的速度大小与方向分布。
6.为解决上述技术问题,本发明采用的技术方案是:
7.烟气流速场测量系统,包括信号检测装置以及信号处理电路;
8.所述信号检测装置包括位于上游的至少两个侵入式静电传感器阵列和位于下游的至少两个侵入式静电传感器阵列;位于上游的侵入式静电传感器阵列和位于下游的侵入式静电传感器阵列均沿水平方向布置有多个传感单元,位于上游的侵入式静电传感器阵列
和位于下游的侵入式静电传感器阵列上的传感单元位置相同;位于上游的侵入式静电传感器阵列中的一个传感单元与相邻上游一个侵入式静电传感器阵列中相同位置的传感单元形成一个测量对,位于上游的侵入式静电传感器阵列中的一个传感单元与相邻下游一个侵入式静电传感器阵列中相同位置的传感单元形成一个测量对;
9.所述信号处理电路包括主要由信号采集与调理单元以及数字信号处理单元;信号采集与调理单元将所述侵入式静电传感器阵列获取的静电信号转换为电压信号;数字信号处理单元,根据所述电压信号,采用多组互相关计算烟气流速分量,并对计算结果进行数据融合以及分量速度合成,从而获得烟气流速的实际速度大小与方向。
10.根据所述电压信号,采用多组互相关计算烟气流速分量,并对计算结果进行数据融合以及分量速度合成,从而获得烟气流速的实际速度大小与方向,包括:
11.对沿x方向的检测电极信号两两分别进行互相关计算获得烟气沿x方向的多个速度测量值以及相关系数;对沿y方向的检测电极信号进行互相关获得烟气沿y方向的多个速度测量值;对沿z方向的检测电极信号进行互相关获得烟气沿z方向的多个速度测量值;
12.对多个互相关速度测量值与互相关系数融合,确定烟气在x、y、z方向上的流速大小。对多个互相关速度测量值与互相关系数融合,确定烟气在x、y、z方向上的流速大小,包括:
13.设定互相关系数的修正值;根据修正值,对互相关系数进行修正,将互相关系数小于修正值的互相关系数定为0;
14.根据多个速度测量值以及修正后的互相关系数进行耦合计算,每个测量对可获得烟气流速在三个方向上的速度分量:
[0015][0016][0017][0018]
其中,下标i表示测量对的序号,v
ix
表示在第i个区域融合后的沿x方向的速度;v
iy
表示在第i个区域融合后的沿y方向的速度;v
iz
表示在第i个区域融合后的沿z方向的速度;v
ix1
、v
ix2
、v
ix3
、v
ix4
表示在第i个区域内x方向上的四个速度计算值;v
iy1
、v
iy2
、v
iy3
、v
iy4
表示在第i个区域内y方向上四个速度计算值;v
iz1
、v
iz2
、v
iz3
、v
z4
表示在第i个区域内z方向上四个速度计算值;c
ix1
、c
ix2
、c
ix3
、c
ix4
分别是第i个测量区域内沿x方向的四个速度计算值对应的互相关系数修正值;c
iy1
、c
iy2
、c
iy3
、c
iy4
分别是第i个测量区域内沿y方向的四个速度计算值对应的互相关系数修正值;c
iz1
、c
iz2
、c
iz3
、c
iz4
分别是第i个测量区域内沿z方向的四个速度计算值对应的互相关系数修正值;
[0019]
在获得烟气流速在三个方向上的速度分量后,获得实际烟气流速大小与方向;其中,第i个测量区域内烟气流速大小为:
[0020][0021]
第i个区域内烟气实际的方向与坐标轴之间的夹角表示为:
[0022][0023][0024][0025]
其中,θ
ix
、θ
iy
、θ
iz
表示第i个区域内烟气实际的方向与x、y、z轴之间的夹角。
[0026]
本发明基于侵入式静电传感器阵列的烟气流速场测量系统,具有结构简单、非接触、成本低、响应快等优点。实际使用时,通过获得烟气流动噪声信号,并结合互相关法以及多信息融合方法,可以获得烟气在某一测量区域内流动的速度大小与流动方向,在提高烟气流速测量准确性的同时,能够对烟气流速方向进行判断,从而构建出测量截面内烟气的流场情况,实现某一测量区域内流速场的在线测量。同时,由于该系统采集的流动信号只受烟气颗粒的荷电情况影响,因此在烟气回流以及流速较小的测量场合仍能正常使用。
附图说明
[0027]
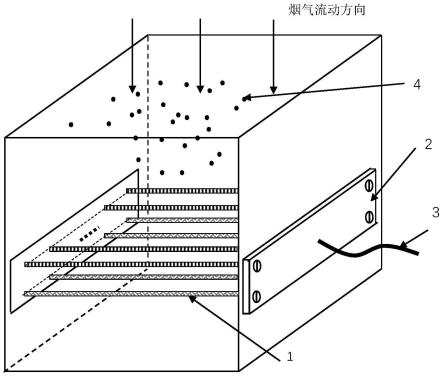
图1侵入式静电传感器阵列安装示意图
[0028]
图2侵入式静电传感器阵列结构示意图;
[0029]
图3是图2入式静电传感器阵列中传感单元结构示意图
[0030]
图4信号处理电路示意图
[0031]
图5检测信号;
[0032]
图6为互相关结果曲线;
[0033]
图7烟气流速与方向测量原理图。
[0034]
图中,1、传感器阵列;2、固定法兰;3、信号总线;4、粉尘颗粒;5、传感单元;6、金属检测电极;7、绝缘隔层;8、金属支撑;9、耐磨隔层;10、信号线。
具体实施方式
[0035]
下面结合附图,对本发明作详细说明:
[0036]
本发明基于侵入式静电传感器阵列的烟气流速场测量系统,包括侵入式静电传感器阵列以及信号处理电路两部分。
[0037]
侵入式静电传感器阵列安装示意图如图1-图3所示,传感器阵列1安装在金属支撑8上并通过固定法兰2固定在烟道内,在烟道的同一截面上可布置多个传感器阵列组成截面阵列,从而对整个烟道截面上的烟气流场进行测量。侵入式静电传感器阵列结构如图2所示,在两固定法兰2之间布置有多个传感单元形成传感器阵列。传感单元结构如图3所示,金属检测电极6与金属支撑8之间通过绝缘隔层7进行隔开,相邻两金属检测电极6之间设置耐磨隔层9进行隔离。电极信号线10穿过绝缘隔离层,从支架空腔内引出。
[0038]
信号处理电路如图4所示,包括信号采集与调理单元以及数字信号处理单元组成,
其中信号采集与调理单元主要将电流信号转换为模拟电路可处理的电压信号,并对流动噪声信号进行滤波处理与信号放大,数字信号处理单元主要将模拟信号转换为数字信号,通过多组互相关计算烟气流速分量,并对计算结果进行数据融合以及分量速度合成,从而获得烟气流速的实际速度大小与方向。
[0039]
静电传感器结合互相关测速原理如图5所示,以电极s1与s5为例,当携带静电的粉尘颗粒依次流经两个电极时,两个检测电极上分别产生如图5所示的x1与y1两个检测信号,这两个信号在信号波动上具有相似性。但由于颗粒先经过s1电极,后经过s5电极,因此两个信号在时间上存在一定偏差,其信号的延迟时间与颗粒从电极s1到电极s5所经历的时间相同。
[0040]
x1与y1两信号之间的延迟时间可以通过对两个信号进行互相关计算获得。两信号之间的互相关系数确定方法为:
[0041]
根据互相关函数,计算互相关函数值;互相关函数为:
[0042][0043]
式中,r(n)为互相关函数值;x(i)为上游信号的第i次离散采样值;y(i+n)为下游信号的第i+n次离散采样值;n为信号采样点数;
[0044]
将互相关函数值的最大值确定为互相关系数;互相关函数值的最大值所对应的偏移点数记为m;两检测信号的互相关结果曲线如图6所示。
[0045]
在已知采样频率f的情况下,计算两检测信号的时间差δt:
[0046]
δt=m/f
[0047]
已知两电极之间距离l的前提下,可以计算烟气在s1与s5电极所在方向上的烟气速度分量:
[0048][0049]
本发明中每个测量对可获得八个检测信号,对其进行互相关与数据融合,便可以获得该八个检测电极组成区域内的烟气流动速度与方向,其测量原理如图7所示。当粉尘颗粒经过八个检测电极组成的传感区域时,八个电极上会获得八个静电感应信号。对沿x方向的检测电极信号两两分别进行互相关计算可以获得烟气沿x方向的多个速度测量值以及相关系数。同理,可通过对沿y、z方向的检测电极信号进行互相关可获得烟气沿y、z方向的多个速度测量值。通过对多个互相关速度测量值与互相关系数融合,可以最终确定烟气在x、y、z方向上的流速大小,融合公式如下所示:
[0050][0051][0052][0053]
其中,下标i表示测量对的序号,v
ix
表示在第i个区域融合后的沿x方向的速度;v
iy
表示在第i个区域融合后的沿y方向的速度;v
iz
表示在第i个区域融合后的沿z方向的速度;v
ix1
、v
ix2
、v
ix3
、v
ix4
表示在第i个区域内x方向上的四个速度计算值;v
iy1
、v
iy2
、v
iy3
、v
iy4
表示在第i个区域内y方向上四个速度计算值;v
iz1
、v
iz2
、v
iz3
、v
z4
表示在第i个区域内z方向上四个速度计算值;c
ix1
、c
ix2
、c
ix3
、c
ix4
分别是第i个测量区域内沿x方向的四个速度计算值对应的互相关系数修正值;c
iy1
、c
iy2
、c
iy3
、c
iy4
分别是第i个测量区域内沿y方向的四个速度计算值对应的互相关系数修正值;c
iz1
、c
iz2
、c
iz3
、c
iz4
分别是第i个测量区域内沿z方向的四个速度计算值对应的互相关系数修正值。
[0054]
相关系数越大表示两信号互相关获得的速度测量值更可靠,在本发明中,当相关系数大于修正值(依据实际情况选取,一般可取0.6)时,认为两检测信号之间具有明显的相关性,其互相关计算结果参与数据融合。在获得烟气流速在三个方向上的速度分量后,根据向量合成的方法,便可以获得实际烟气流速大小与方向。实际应用时,每八个检测电极便可以获得一个烟气流动速度与方向,因此,当传感器阵列布置在整个烟气截面时,便可以获得测量截面的烟气流场。
[0055]
当烟气在测量区域内产生回流时,信号之间的互相关偏移点数会由正变为负,但最终的互相关速度计算并不会受到影响。因此通过互相关过程参数也可以判断测量区域内的烟气是否发生回流。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1