一种旋转机械碰磨冲击故障位置的检测方法
1.本发明属于动力机械技术领域,具体来说,涉及一种旋转机械碰磨冲击故障位置的检测方法。
背景技术:
2.动力学方程是一个非齐次微分方程,它的解由相对应的齐次微分方程的通解和满足条件的特解线性叠加而成。受到外界驱动的转子的振动包括两方面,一是系统的本征振动(以自身固有频率的振动),二是跟随外力频率的振动。本征运动是随时间而指数衰减的,因此在稳态时转子是跟随驱动频率的振动,也就是强迫振动。当发生转子严重碰磨等故障时,引起的力冲击效应所产生的振动频谱很丰富,除了系统此时的强迫振动频率外,其中还会包含大量的低频与高频成分,同时会激发转子的自由振动响应,也就是振动信号中会含有转子固有频率分量。
3.随着旋转机械大型化发展,动静间隙通常设计的比较小,在运行过程中稍有不慎就可能发生动静碰磨,轻则会导致旋转机械效率下降,严重则会引发大幅振动,影响运行安全性。转子碰磨发生后,由于旋转机械转轴表面线速度很高,摩擦就会产生高温,严重碰磨的区域温度要高于轻度碰磨和不发生碰磨的区域,温度不均匀会导致转子的热变形,也就是碰磨的力冲击效应带来了热冲击效应。热冲击效应最直接的后果就是导致转轴发生热变形,不平衡力力增大,加大旋转机械的振动。而大振动又会进一步加剧碰磨程度,从而形成恶性循环,对旋转机械的安全运行带来很大的危害。因此,必须对碰磨这类力冲击效应引起的振动予以重视。
4.现有碰磨故障部位的监测主要依靠矢量监测法。监测碰磨引起的振动,要兼顾考虑很多方面的因素,包括振动的幅值大小、振动的变化量、振动的相位变化等,综合考虑矢量监测法效果比较好。在转轴表面发生碰磨时,临时热效应会引起转轴不平衡量发生变化,合成的振动矢量也会相应变化,利用这一振动矢量的变化关系可以找到碰磨位置。选择转子合适位置安装位移传感器,将采集到的通频信号经前置放大和数字滤波后进行快速fft,提取出振动信号的工频分量,然后将工频分量与从历史数据库中调出的工频振动分量进行对比计算,得出碰磨引起的振动矢量的变化大小,从而确定碰磨故障的所在位置。
5.现有技术的不足之处:
6.(1)矢量监测法中利用的是碰磨带来的热冲击效应引起的不平衡量变化,将碰磨冲击等效为不平衡力来进行计算,通过对比转轴两端的振动矢量变化来判断碰磨位置。这种方法会受到转子本身存在的不平衡力产生的干扰,同时,在大多数情况下只有碰磨点附近振动矢量变化才较为明显,离碰磨点越远振动矢量变化幅度越小。
7.(2)矢量监测法重要的一步是从历史数据库中获取信息进行对比。当历史运行数据不足,或历史数据中的参考振动矢量值本身存在某些误差时,就会影响结果的判断。
技术实现要素:
8.技术问题:本发明提出一种旋转机械碰磨冲击故障位置的检测方法,通过波形重构和相关分析来确定故障位置。
9.技术方案:为解决上述技术问题,本发明实施例采用以下技术方案:
10.一种旋转机械碰磨冲击故障位置的检测方法,包括以下步骤:
11.步骤10)安装检测部件;
12.步骤20)发生异常碰磨冲击时,从旋转机械上进行信号提取,获得时域信号;
13.步骤30)重构所述时域信号;
14.步骤40)分析信号,获得信号传递到左右两端速度传感器经历的时间差为δt;
15.步骤50)故障定位:设机械波在转轴(1)中的传播速度为v,转轴(1)两端的速度传感器之间的距离为s,根据所述时间差δt,则碰磨冲击所发生的位置x如式(4)所示:
16.x=s/2-vδt/2
ꢀꢀꢀ
式(4)
17.式(3)中,碰磨冲击所发生的位置x是以转轴左侧的速度传感器为坐标零点。
18.作为优选例,所述步骤10)具体包括:在待测旋转机械的转子转轴(1)左右两端的轴承座上各安装一个速度传感器。
19.作为优选例,所述步骤10)中,安装所述速度传感器时,故障位置处在两个速度传感器位置之间。
20.作为优选例,所述步骤20)具体包括:在转子转轴(1)发生异常碰磨冲击时,将两个速度传感器测得的信号分别输入振动信号采集分析仪(8)中,利用信号采集分析仪(8)记录碰磨冲击发生后的时域信号。
21.作为优选例,所述步骤30)具体包括:所述时域信号中包含多个振幅、相位、频率不相同的单一波形,如式(1)所示:
[0022][0023]
式中,y(t)为时域信号的振动位移,a1为第一个时域信号的振幅,a2为第二个时域信号的振幅,ai为第i个时域信号的振幅,ω1为第一个时域信号的频率,ω2为第二个时域信号的频率,ωi为第i个时域信号的频率,为第一个时域信号的相位角,为第二个时域信号的相位角,为第i个时域信号的相位角,t为时间变量,e为自然指数,ζ0e-βt
为阻尼衰减正弦信号的振幅,ω0为阻尼衰减正弦信号的频率,为阻尼衰减正弦信号的相位;
[0024]
根据碰磨的力冲击频率特征,将两个速度传感器采集到的信号分别进行筛选重构,重构过程如下:首先将时域信号转换为对应的频域信号h(f);在频域信号h(f)中设置频率重构上限ωmax与下限ωmin,使之满足条件ωmin《ω0《ωmax,且其余信号频率ω1、ω2、ωi都处在区间[ωmin,ωmax]以外;转换后原时域信号中频率ω1、ω2、ωi对应信号的信号强度由时域表示法的a1、a2、ai转换为频域表示法h(f)中的b1、b2、bi,然后将信号强度b1、b2、bi改设为0,而转换后ω0所处区间[ωmin,ωmax]内对应的频域信号强度不做改动,使h(f)得以重构为新的频域信号h(f),h(f)中只存在ω0对应的信号,最后再将h(f)通过逆变换为重构后的时域信号;
[0025]
波形重构后只保留由异常碰磨冲击引起的时域波形,如式(2)所示:
[0026]
ζ(t)=ζ0e-βt
sin(2π
×
ω0t)
ꢀꢀꢀ
式(2)
[0027]
式中,ζ(t)为重构后的时域信号的振动位移,t为时间变量,e为自然指数,ζ0e-βt
为阻尼衰减正弦信号的振幅,ω0为阻尼衰减正弦信号的频率,为阻尼衰减正弦信号的相位。
[0028]
作为优选例,所述步骤40)包括:将信号采集分析仪(8)采集的两个速度传感器信号y1(t)与y2(t)都经过步骤30)重构处理后,得到的第一时域信号ζ1(t)和第二时域信号ζ2(t),利用相关性分析算法得到分析函数r(n),如式(3)所示:
[0029][0030]
式中,r(n)为互相关分析函数,n为总时刻数,m表示时刻,n表示两个信号相差的间隔;ζ1(m)表示m时刻,一个速度传感器的第一时域信号;ζ2(m+n)表示m+n时刻,另一个速度传感器的第二时域信号;函数r(n)取最大值时对应的时间间隔n=δt,得到信号传递到左右两端速度传感器经历的时间差为δt。
[0031]
有益效果:本发明通过在碰磨故障位置左右两端采用两个速度传感器分别接收信号,实现在转轴上的故障定位。根据机械波在固体中的传播速度和计算所得时间差,可以计算出碰磨冲击发生的位置与两速度传感器中心点的偏差,从而可以确定碰磨冲击发生的位置。该方法利用碰磨发生时力冲击效应激发的固有频率特征来对采集到的信号进行波形重构和相关分析,通过局部特征实现对碰磨位置的确定。本发明计算过程中无需与历史数据进行对比,简便操作,结果可靠。
附图说明
[0032]
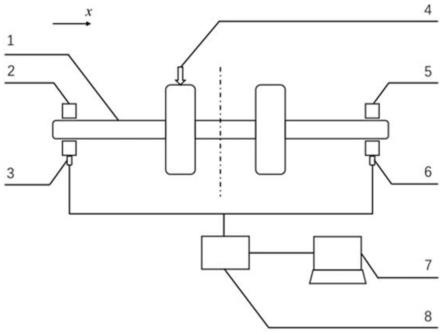
图1为本发明实施例采用的检测装置示意图。
具体实施方式
[0033]
下面结合附图和具体实施例,进一步阐释本发明。
[0034]
如图1所示,本发明实施例的一种旋转机械碰磨冲击故障位置的检测方法,包括以下步骤:
[0035]
步骤10)安装检测部件。
[0036]
步骤10)具体包括:在待测旋转机械的转子转轴1左右两端的轴承座上各安装一个速度传感器。利用两个速度传感器测量故障位置。速度传感器可以采用振动速度传感器。安装所述速度传感器后,故障位置处在两个速度传感器位置之间,即处于左传感器的右侧,同时也处于右传感器的左侧。
[0037]
步骤20)发生异常碰磨冲击时,从旋转机械上进行信号提取,获得时域信号。
[0038]
步骤20)具体包括:在转子转轴1发生异常碰磨冲击时,将两个速度传感器测得的信号分别输入振动信号采集分析仪8中,利用信号采集分析仪8记录碰磨冲击发生后的时域信号。
[0039]
步骤30)重构所述时域信号。
[0040]
步骤30)具体包括:所述时域信号中包含多个振幅、相位、频率不相同的单一波形,如式(1)所示:
[0041][0042]
式中,y(t)为时域信号的振动位移,a1为第一个时域信号的振幅,a2为第二个时域信号的振幅,ai为第i个时域信号的振幅,ω1为第一个时域信号的频率,ω2为第二个时域信号的频率,ωi为第i个时域信号的频率,为第一个时域信号的相位角,为第二个时域信号的相位角,为第i个时域信号的相位角,t为时间变量,e为自然指数,ζ0e-βt
为阻尼衰减正弦信号的振幅,ω0为阻尼衰减正弦信号的频率,为阻尼衰减正弦信号的相位;
[0043]
根据碰磨的力冲击频率特征,将两个速度传感器采集到的信号分别进行筛选重构,重构过程如下:首先将时域信号转换为对应的频域信号h(f);在频域信号h(f)中设置频率重构上限ωmax与下限ωmin,使之满足条件ωmin《ω0《ωmax,且其余信号频率ω1、ω2、ωi都处在区间[ωmin,ωmax]以外;转换后原时域信号中频率ω1、ω2、ωi对应信号的信号强度由时域表示法的a1、a2、ai转换为频域表示法h(f)中的b1、b2、bi,然后将信号强度b1、b2、bi改设为0,而转换后ω0所处区间[ωmin,ωmax]内对应的频域信号强度不做改动,使h(f)得以重构为新的频域信号h(f),h(f)中只存在ω0对应的信号,最后再将h(f)通过逆变换为重构后的时域信号;
[0044]
波形重构后只保留由异常碰磨冲击引起的时域波形,如式(2)所示:
[0045]
ζ(t)=ζ0e-βt
sin(2π
×
ω0t)
ꢀꢀꢀ
式(2)
[0046]
式中,ζ(t)为重构后的时域信号的振动位移,t为时间变量,e为自然指数,ζ0e-βt
为阻尼衰减正弦信号的振幅,ω0为阻尼衰减正弦信号的频率,为阻尼衰减正弦信号的相位。
[0047]
步骤40)分析信号,获得信号传递到左右两端速度传感器经历的时间差为δt。
[0048]
所述步骤40)包括:将信号采集分析仪8采集的两个速度传感器信号y1(t)与y2(t)都经过步骤30)重构处理后,得到的第一时域信号ζ1(t)和第二时域信号ζ2(t),利用相关性分析算法得到分析函数r(n),如式(3)所示:
[0049][0050]
式中,r(n)为互相关分析函数,n为总时刻数,m表示时刻,n表示两个信号相差的间隔;ζ1(m)表示m时刻,一个速度传感器的第一时域信号;ζ2(m+n)表示m+n时刻,另一个速度传感器的第二时域信号;函数r(n)取最大值时对应的时间间隔n=δt,得到信号传递到左右两端速度传感器经历的时间差为δt。
[0051]
步骤50)故障定位:设机械波在转轴(1)中的传播速度为v,转轴(1)两端的速度传感器之间的距离为s,根据所述时间差δt,则碰磨冲击所发生的位置x如式(4)所示:
[0052]
x=s/2-vδt/2
ꢀꢀꢀ
式(4)
[0053]
式(3)中,碰磨冲击所发生的位置x是以转轴左侧的速度传感器为坐标零点。
[0054]
本实施例的方法采用的检测装置,包括一个振动分析仪和两个振动速度传感器,所述两个振动速度传感器应分别安装在待测故障处的左右两端;两个振动速度传感器连接到同一振动分析仪上采集信号。
[0055]
图中1为待检测旋转机械的检测系统。该检测系统包括左支撑轴承座2、右支撑轴
承座5、左振动速度传感器3、右振动速度传感器6,计算机7、振动信号分析采集仪8。左支撑轴承座2和右支撑轴承座5安装在旋转机械1的两端,左振动速度传感器3和右振动速度传感器6分别安装在左支撑轴承座2和右支撑轴承座5的孔位上,并分别通过数据连接线与振动信号分析采集仪8进行连接,振动信号分析采集仪8通过连接线将数据发送至计算机7。计算机7计算出碰磨冲击故障发生位置4。
[0056]
本发明的方法对信号进行了波形重构,可避免旋转机械本身不平衡力的干扰。与利用碰磨的热冲击效应导致转子产生热变形后再根据变形产生的等效不平衡力进行诊断不同,本方法步骤30)中利用碰磨时产生的力冲击效应的频率特征来重构信号。左振动速度传感器3、右振动速度传感器6采集到的信号中包含了由力冲击效应引起的固有频率下的振动,在复杂时域信号中直接将所需的信号分离出来是很难完成的,但将其转换为频域信号后,依据固有频率特征对采集到的信号进行筛选即可分离出所需信号。
[0057]
本方法原理易懂,检测装置安装与操作过程简单。只需在轴承座安装两个振动速度传感器,将传感器的信号接入连接了计算机的振动信号分析采集仪即可。步骤40)中利用两个重构后的信号进行相关性分析可得出时间差,再根据机械波在固体中的传播速度即可得知故障位置,计算简洁,避免了多余冗杂的计算过程。
[0058]
下面列举一个模拟计算例,对本发明的方法可行性进行说明。设左右两端振动速度传感器采集到的离散点对应的时域信号分别为:
[0059]
y1(t)=0.5sin(2π
×
11t+0.02)+e-t
sin(2π
×
25t)+0.3sin(2π
×
36t+0.5)
[0060]
y2(t)=0.5sin(2π
×
11t+0.0202)+e-t
sin(2π
×
25t+2
×
10-4
)+0.3sin(2π
×
36t+0.5002)
[0061]
根据力冲击效应的频率特征对采集得到的信号进行重构。将时域信号经过快速傅里叶变换后得到对应的频域信号,本例中已知旋转机械的固有频率为25hz,根据此频率特征进行重构筛选,设定重构频率的范围为20-30hz,即只保留20-30hz之间的频域信号,将其余频率(本例中为0-20hz与30-50hz)对应的频域信号的振幅全部改设为0。这样,只保留了固有频率下的频域信号。之后将处理完的频域信号再次经过逆变换,可得到左右两端传感器重构后的时域信号ζ1(t)与ζ2(t)。
[0062]
本例中振动信号采集分析仪采集总时刻数n为1000。将ζ1(t)与ζ2(t)代入式(3),两端点处计算误差大,排除后可得r(n)取最大时对应的横坐标值即为时间差:δt=4
×
10-4
s。
[0063]
左右两端速度传感器之间的距离为10m,机械波在旋转机械1中的传播速度取5000m/s,由式(4)计算得知故障发生位置坐标为:x=10
×
0.5-5000
×4×
10-4
×
0.5=3m,则可大致确定碰磨冲击故障位置4在以做传感器为坐标零点的右侧3m位置。
[0064]
以上显示和描述了本发明的基本原理、主要特征和优点。本领域的技术人员应该了解,本发明不受上述具体实施例的限制,上述具体实施例和说明书中的描述只是为了进一步说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护的范围由权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1