确定估计速度的不确定性估计的方法与流程
确定估计速度的不确定性估计的方法
1.本技术是原案申请号为201910747166.2的发明专利申请(申请日:2019年8月14日,发明名称:确定估计速度的不确定性估计的方法)的分案申请。
技术领域
2.本发明涉及确定对象的估计速度的不确定性估计(uncertainty estimate)的方法,其中,不确定性估计表示估计速度相对于对象的真实速度的不确定性。
背景技术:
3.不确定性估计对于对估计速度的有效性进行量化很有用。换句话说,不确定性度量表示可以信任估计速度的程度,或者估计速度与真实速度匹配的可能性。也就是说,不确定性可以解释成真实速度与估计速度之间的潜在误差的范围。根据一个定义,不确定性表示速度范围,其中,假设真实速度落入该范围内。因此,不确定性估计是该范围的估计。
4.通常,估计速度与真实速度之间的潜在误差越高,则不确定性越高。优选地,不确定性估计至少与不确定性相关,其可以表现为不确定性与不确定性估计成比例。
5.在现代汽车应用中,尤其是在自动或自主驾驶应用中,需要准确地确定在主车辆附近的任何对象的运动特性。这种对象可以是其它车辆,但也可以是行人或如交通标志或墙的静止对象。根据在主车辆附近的任何对象的位置和运动特性,可以借助于可操作地安装在主车辆中的传感器技术在一般感知的意义上确定车辆的环境。应当理解,主车辆(即,主车辆的控制单元)需要具有关于周围对象的速度的精确信息,以便能够通过自动生成的驾驶命令安全地控制车辆。然而,如上所述,通常不可能完全精确地估计周围对象的速度。为了仍然允许安全地自动驾驶主车辆,针对各个估计速度的不确定性估计是非常有帮助的,因为主车辆的控制单元可以容易地使其自身适应估计速度的有效性,从而使得能够最佳地使用可用技术信息。
6.重要的运动特性是给定对象的速度,通常需要由主车辆借助于传感器估计该速度,因此会受到估计误差的影响,即所估计的速度偏离对象的真实速度。确定估计速度的一个方法是通过使用安装在主车辆中的一个或更多个雷达传感器,其中,利用雷达系统确定多个检测点,各个检测点表示在主车辆附近的给定位置的估计速度。检测点也可以位于对象上,并且因此可以用于估计对象的速度。优选地,联合评估单个对象上的多个检测点,以便得出比单个检测点的估计速度更精确的估计速度。估计速度可以包括幅度和方向,使得估计速度是具有两个分量的矢量,即相对于两个空间维度对速度进行量化。然而,估计速度也可能仅包括幅度值。
7.由于利用现代传感器技术(尤其是雷达技术)获得精确的估计速度的固有限制,需要获得与估计速度的潜在误差有关的知识。在这方面,不确定性度量可以用于进一步处理估计速度,例如用于跟踪算法,该跟踪算法被配置成跟踪对象,使得主车辆具有关于特定对象的运动的精确信息。这就是说,对估计速度的给定值连同不确定性估计一起进行处理。以这种方式,可以确保估计速度根据其有效性而影响给定的应用。更简单地说,具有高不确定
性估计的估计速度应该具有与具有低不确定性估计的另一估计速度相比更小的影响。
8.需要准确的不确定性估计(或度量),该不确定性估计尽可能地对估计速度的真实不确定性进行量化,尤其是当对象以不能或不应该被估计的角速度旋转时。在一些应用中,估计速度的方差可以被用作不确定性估计。然而,已经发现,在实际交通情景中出现的许多运动情况下,这种不确定性估计是不准确的。尤其是,如果给定对象不沿直线移动(线性运动),则方差通常是非常差的不确定性估计。此外,方差通常示出严重影响对估计速度的任何进一步处理的系统误差,因此导致降低自动驾驶应用的性能。因为任何交通参与者的安全性都不能遭受损害,所以这是不可容忍的。
技术实现要素:
9.本发明要解决的问题是提供一种确定对象的估计速度的不确定性估计的改进的方法。
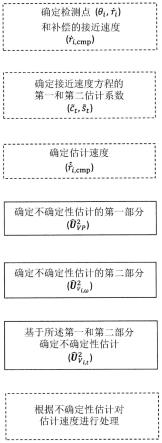
10.确定对象的估计速度的不确定性估计的方法包括以下步骤:(a)确定不确定性估计的第一部分,该第一部分表示相对于对象的速度分布方程的第一估计系数和第二估计系数的不确定性,该第一估计系数被分配至估计速度的第一空间维度,并且该第二估计系数被分配至估计速度的第二空间维度。速度分布方程表示根据第一估计系数和第二估计系数的估计速度;
11.(b)确定不确定性估计的第二部分,该第二部分表示相对于对象的角速度、对象在第二空间维度的第一坐标以及对象在第一空间维度的第二坐标的不确定性;以及
12.(c)基于第一部分和第二部分确定不确定性估计。
13.总之,不确定性度量包括两个专用部分或由两个专用部分组成。第一部分表示相对于所谓的速度分布方程的两个估计“速度”系数的不确定性,其中,速度分布方程通常是本领域已知的(参见d.kellner,m.barjen-bruch,k.dietmayer,j.klappstein,j.dickmann,“instantaneous lateral velocity estimation of a vehicle using doppler radar”,information fusion(fusion),2013 16th international conference,伊斯坦布尔,2013年)。该等式也称为接近速率方程(range rate equation),并且通常表示根据两个所述系数的估计速度。这些系数被分配至各自的空间维度,这意味着系数通常表示对象在这些维度的速度分量。该解释通常与对象沿直线移动(线性运动)的运动情景相关联。然而,如果存在对象绕预定轴的旋转运动,即对象具有大于零的横摆角速度(yaw rate),则系数不完全表示“线性”速度分量,而是旋转速度部分与线性速度部分的混合。然而,因为系数优选地用于评估各个维度中的总速度分量,所以它们被分配至所述维度。在借助于传感器技术(尤其是雷达技术)估计对象运动的领域中,技术人员通常熟知速度分布方程。在下面还讨论并进一步明确地提供速度分布方程。
14.速度分布方程的第一估计系数和第二估计系数是估计的数字,并且对于估计速度的总体不确定性起作用。因此,不确定性度量的所述第一部分可以解释成捕获与系数相关的不确定性信息。
15.不确定性估计的第二部分与对象的角速度相关。尤其是,角速度是对象的横摆角速度,即对象在水平平面内绕预定轴的旋转速度,该预定轴垂直于所述平面延伸。例如,在行驶时,汽车(一种类型的对象)的横摆角速度通常与由驾驶员的转向活动引起的汽车的横
向移动相对应。
16.当仅使用一个传感器的一次扫描(即一个测量实例)时,角速度的估计通常提供不充分的结果。这就是说,估计的角速度在大多数情况下是不合理的。可以通过随时间过滤信号或通过使用两个传感器来改进估计(参见d.kellner,m.barjenbruch,j.klappstein,j.dickmann和k.dietmayer,“instantaneous full-motion estimation of arbitrary objects using dual doppler radar”,在proceedings of intelligent vehicles symposium(iv)中,美国密歇根州迪尔伯恩,2014年)。然而,该解决方案需要多个传感器以覆盖视场,并且导致显着增加总体成本。
17.对象的角速度对于对象的估计速度的总体不确定性起作用(独立于角速度的潜在估计)。可以证明,一般而言,在估计速度、第一系数和第二系数以及角速度之间存在数学上的联系。该联系可以通过对象在第二空间维度中的第一坐标以及对象在第一空间维度中的第二坐标表示。第一坐标和第二坐标与一个点相关或表示一个点,该点对应于在对象上假设估计速度有效的位置。然而,由于数学原因,坐标在维度之间倒置(inverted),这在下面进一步详细说明中可以明显看出。所提出的不确定性估计考虑了这些坐标,这导致了对于第二部分的局部定义来说,更准确的不确定性估计。
18.基于不确定性估计的第一部分和第二部分形成最终的不确定性估计。已经发现将不确定性估计分成两部分导致总体估计的更高精度。尤其是,与接近速率方程的系数分开地处理角速度是改进所提出的不确定性估计的可靠性的一个方面。
19.在从属权利要求、说明书和附图中说明了本发明的有利实施方式。
20.根据一个实施方式,不确定性估计表示估计速度的离散度。同样,不确定性估计的第一部分表示第一估计系数和第二估计系数的离散度。此外,第二部分可以表示对象的角速度的离散度。术语“离散度”在某种意义上被理解成分散,它表示可能的值的范围。已知的离散度类型是方差和标准偏差,且相应地术语离散度不受到限制。这些类型表示值围绕均值的离散度。就离散度而言表达不确定性度量或其部分的优点是对估计有直观理解,这在统计学领域中是已知的。例如,高离散度可能代表高不确定性。
21.根据另一实施方式,不确定性估计和/或不确定性估计的第一部分和/或第二部分被确定为二维矩阵,其中,二维矩阵表示相对于第一空间维度和第二空间维度的离散度。尤其是,可以确定各个部分和所产生的不确定性估计,即表示成二维矩阵。考虑到对给定的估计速度(针对该估计速度,不确定性估计应该有效)的有效处理,矩阵的使用是有利的。此外,可以实现两个空间维度与矩阵的两个维度之间的直接对应。
22.根据另一实施方式,基于以下项确定第一部分:
[0023]-表示第一估计系数和第二估计系数的协方差矩阵的协方差部分,以及
[0024]-表示第一估计系数和/或第二估计系数的偏差的偏差部分。
[0025]
例如,不确定性度量的第一部分可以被确定为协方差部分和偏差部分的总和。然而,其它类型的组合也是可能的。
[0026]
所述协方差部分可以被确定为第一估计系数和第二估计系数的协方差矩阵,其中,协方差矩阵包括系数的方差以及它们之间的协方差。在统计学领域中协方差矩阵的这种结构是已知的,并且可以高效地进行计算。已经证明其是稳健的,并且与其它部分组合,可以提高不确定性估计的准确性。
[0027]
术语“偏差”通常被解释成系统统计误差。例如,偏差可以是表示估计平均值与值的真实平均值之间的平均差的常数。协方差部分可以以估计平均值为中心,其中,偏差可以表示估计平均值离真实平均值多远。因此,偏差部分可以被解释成相对于第一部分的协方差部分或另一(子)部分中的系统误差的校正部分。
[0028]
重要的是要指出偏差(或估计偏差)不是用于校正估计速度,而是用于改进不确定性估计以使其更加一致。对偏差进行估计以便改善估计不确定性(而不是估计速度)的有效性。对偏差的精确了解不是必要的,并且在某些情况下由于缺乏可观察性甚至无法估计偏差。可以通过引入偏差部分来处理这种缺陷。类似的方法也可用于确定角速度的不确定性。
[0029]
进一步考虑偏差部分,根据一个实施方式,可以基于对象的多个检测点和至少一个常数来确定偏差部分,其中,多个检测点中的每一个包括在对象上的检测位置处的估计速度,至少通过一个角度来限定对象上的所述检测位置。如上面进一步指出的,可以借助于雷达系统获取检测点,然而,其它传感器技术也是可能的。优选地在一个实例中获取检测点,即多个检测点仅包括来自一次扫描的检测点,尤其是雷达系统的雷达扫描。
[0030]
多个检测点使得能够根据实际传感器数据调整偏差部分,这显着改进了不确定性估计的准确度。尤其是,偏差部分可以使用与用于确定速度分布方程的第一系数和第二系数相同的数据,即使用来自检测点的数据来确定速度分布方程的系数和偏差部分。
[0031]
可以将(确定了其不确定性估计的)估计速度分配至对象的位置。优选地由对象在第一空间维度中的第一坐标和对象在第二空间维度中的第二坐标表示该位置,并且其中,根据对象的所述位置确定不确定性估计。将不确定性分配至对象上或对象的特定位置提高了不确定性度量的准确性,因为其“最大局部有效性”被明确地考虑在内,使得对估计速度的后续处理可以从该信息中受益。可以避免为了针对大的对象提供一个单个不确定性估计而出现的“有损平均(lossy averaging)”。
[0032]
(确定了其不确定性估计的)估计速度可以等于速度分布方程的速度,即估计速度可以直接取决于第一估计系数和第二估计系数。然而,也可以以其它方式确定估计速度,例如通过使用其它传感器技术。
[0033]
在下文中,将讨论关于确定第二部分的实施方式。
[0034]
根据一个实施方式,基于中间第二部分确定第二部分。中间第二部分仅表示相对于角速度的不确定性,其中,中间第二部分是预先确定的。换句话说,中间第二部分仅表示“角速度不确定性”,例如,假设包括或涵盖真实未知角速度的一系列值。在该方法中,中间第二部分是预先确定的,即被设置为一个或更多个预定值。已经发现,利用预定的中间第二部分可以实现更好的结果,而不是试图基于角速度的实际估计来确定中间第二部分。角速度难以高精度地估计,尤其是当应该仅从一次扫描(“单个处理实例”)估计角速度时。当使用多个传感器观察一个单个对象时,估计仍然很困难(参见d.kellner,m.barjenbruch,j.klappstein,j.dickmann和k.dietmayer,“instantaneous full-motion estimation of arbitrary objects using dual doppler radar”在proceedings of intelligent vehicles symposium(iv)中,美国密歇根州迪尔伯恩,2014年)。当仅使用一个传感器来观察对象时,估计对象的角速度(即,横摆角速度)是非常困难的,在大多数情况下,甚至不能认为估计角速度是大致合理的。在这种情况下,所提出的不确定性度量可以提供显着的优点,因为可以完全避免估计角速度。
[0035]
因为已经认识到对于大多数对象类别,角速度通常被限制到某些限度,所以依赖于预定的中间第二部分甚至可以导致更精确的结果。例如,在交通情景中,可以假设任何对象的角速度通常会低于某个阈值。
[0036]
在优选实施方式中,由对象的角速度分布的方差预先确定中间第二部分。这是借助于假设分布对角速度进行建模的方法。可以选择方差或相关数字作为关键值(figure),因为它非常适合表示值的范围或离散度,这与不确定性估计的一般思维方式一致。中间第二部分可能等于对象的角速度的预定方差。
[0037]
在一个具体实施方式中,所述分布是具有对象角速度的至少一个预定极值的均匀分布。因此,可以经由分布做出明确的模型假设。角速度的其它模型分布也是可能的,例如三角形或梯形分布。
[0038]
在另一实施方式中,通过表示对象的角速度的极值的至少一个参数预先确定中间第二部分。例如,可以手动设置角速度的最大值并使用其来对中间第二部分进行参数化。这可以通过例如把中间第二部分确定为角速度的模型分布的方差来完成,其中,模型分布限于负最大角速度(负极值)与正最大角速度(正极值)之间的角速度。如前所述,可以选择均匀分布作为模型分布,但是其它模型分布也是可能的。这可取决于具体应用。还可以根据对象类型选择模型分布。例如,如果对象被自动分类成乘用车,则可以选择与将对象分类成卡车时不同的分布。同样,可以为中间第二部分选择不同的极值。因此,一般而言,不确定性估计的确定可以取决于对象的类别,其中,可以通过使用分类方法自动确定类别。这样的分类方法可以基于借助于摄像头获取的对象的视觉数据,但也可以基于对象的估计速度。
[0039]
在又一实施方式中,可以基于第一部分和第二部分的总和来确定不确定性估计。其它数学组合也是可能的,例如不确定性估计的第一部分与第二部分之间的商。
[0040]
考虑到不确定性估计的可能使用,该方法可以进一步包括根据对象的估计速度控制对象附近的车辆,其中,根据不确定性估计对估计速度进行处理。
[0041]
本发明还涉及一种具有软件(尤其是固件)的存储装置,用于执行根据前述实施方式中的一个的方法。
[0042]
存储装置可以是包括存储装置和车辆的系统的一部分,其中,车辆包括传感器和被配置成与存储装置协作的控制单元。该控制单元还被配置成确定传感器附近的至少一个对象的多个检测点,各个检测点包括在对象上或在对象附近的位置处的估计速度。此外,控制单元被配置成通过使用存储在存储装置中的软件来确定检测点中的至少一个的估计速度的不确定性估计。
[0043]
在系统的一个实施方式中,控制单元还可以被配置成基于不确定性估计来跟踪对象和/或基于不确定性估计对对象进行分类。还可以基于不确定性估计将对象与其它对象区分开。还可以修改其它应用(尤其是汽车应用,其中,采用除(主)车辆之外的对象的估计速度)使得不确定性估计得以被考虑。因此可以提高这种应用的可靠性和准确性。这种应用的示例是距离控制、代客泊车和自主驾驶。
[0044]
根据该系统的另一实施方式,传感器和控制单元可以形成所谓的脉冲多普勒雷达系统,该脉冲多普勒雷达系统是用于确定多个检测点的普遍且众所周知的系统,各个检测点表示在对象上的位置处的估计速度,并且至少通过角度θi限定该位置。该角度通常是方位角,因为它表示绕系统的雷达天线的视轴的角度,其中,该角度在水平平面中,该水平平
面对应于车辆下方的地面。作为本公开的一般方面并且根据该方法的实施方式,基于多个检测点确定第一估计系数和第二估计系数,各个检测点表示在对象上的位置处的估计速度,至少通过角度θi限定该位置,其中,通过下式表示速度分布方程:
[0045][0046]
其中,表示对象在第i个检测点的位置处的速度,表示第一估计系数,表示第二估计系数,θi表示第i个检测点的位置。优选地在一个实例中获取多个检测点,即多个检测点仅包括来自一次扫描(尤其是雷达系统的雷达扫描)的检测点。
[0047]
雷达系统(尤其是所述脉冲多普勒雷达系统)非常适合于提供多个检测点,在其基础上可以容易地确定所述速度分布方程。所提出的不确定性估计尤其适合于准确地表示通过使用速度分布方程确定的估计速度的不确定性。
[0048]
应当理解,结合本文所公开的数学表达式,不一定需要在严格的数学意义上精确地满足该数学表达式。尤其是,可以从概念意义上理解代数表达式。这就是说,如果仅大致满足等式,则仍然可以满足等号。因此,如本领域技术人员所理解的,如果在计算机上实施表达式,那么来自仅由于实现方式的技术细节而导致的表达式的狭义含义(即,偏移或基本上恒定的因素)的任何数值偏差都不会影响落入表达的含义的实现方式的事实。尤其是,可以用比例符号(即“~”)代替出现在本文公开的任何代数表达式中的任何等号(即,“=”)。
附图说明
[0049]
参照附图通过示例的方式进一步描述本发明,其中:
[0050]-图1示出了目标坐标系;
[0051]-图2示出了车辆坐标系;
[0052]-图3示出了传感器坐标系;
[0053]-图4示出了相对于主车辆的目标车辆,其中检测点位于目标车辆上;
[0054]-图5例示了如何计算在检测点位置处的速度矢量;
[0055]-图6例示了如本文所描述的方法的实施方式。
[0056]
参考标号列表
[0057]1ꢀꢀꢀꢀꢀ
世界坐标系的原点
[0058]2ꢀꢀꢀꢀꢀ
目标车辆
[0059]3ꢀꢀꢀꢀꢀ
前保险杠
[0060]
3'
ꢀꢀꢀꢀ
后保险杠
[0061]3”ꢀꢀꢀ
车辆坐标系的原点
[0062]4ꢀꢀꢀꢀꢀ
主车辆
[0063]5ꢀꢀꢀꢀꢀ
传感器坐标系的原点
[0064]
5'
ꢀꢀꢀꢀ
雷达系统
[0065]
6、6' 检测点
[0066]7ꢀꢀꢀꢀꢀ
目标的旋转中心
具体实施方式
[0067]
通常,主车辆4(参见图2)配备有雷达系统5'(参见图2),对来自雷达系统5'的视场中的目标2(图1)的反射雷达信号进行处理以提供数据以便确定方法中使用的参数。
[0068]
为此,多个条件和要求可能是有利的。目标2(刚体,例如车辆)优选地是扩展目标,即该目标使得能够确定从目标2实时反射的多个反射点6'(参见图4)并且这基于原始雷达检测测量。
[0069]
目标2是具体实施方式和权利要求的一般部分的意义上的对象的示例。然而,其它类型的对象(尤其是在普通交通场景中出现的特定对象,例如摩托车、自行车、行人、大型车辆和小型车辆)也是可能的。此外,原则上,对象也可以是静止对象。
[0070]
如本文所使用的,术语“扩展目标”用于指能够提供多个(即两个、三个或更多个)间隔开的散射点6'(其也称为反射点6')的目标2。因此,术语“扩展目标”被理解成具有某个物理尺寸的目标2。在这种情况下,应该注意的是,可以选择物理尺寸,例如,在0.3m到20m的范围内,以便能够检测反射点6',该反射点6'源于从例如移动的人到移动的重型货车或类似车辆。
[0071]
不一定从一次雷达扫描到下一雷达扫描单独地跟踪多个散射点6',并且散射点6'的数量在扫描之间可以是不同的。此外,在连续雷达扫描中,散射点6'的位置在扩展目标2上可以是不同的。
[0072]
可以由主车辆4根据从目标2反射的雷达信号来确定雷达反射点6',其中,可以执行对给定的反射信号与关联的发射雷达信号的比较以确定雷达反射点6'的位置(例如,在笛卡尔坐标或极坐标(方位角、径向范围)中)相对于主车辆上的雷达发射和/或雷达接收元件/单元的位置,其可以是雷达传感器单元的位置。
[0073]
通过使用例如多普勒雷达技术,也按照本领域中已知的确定接近速率。值得注意的是,来自单个雷达扫描的“原始数据”可以提供n个反射点中的第i个反射点的参数θi(方位角)和(原始接近速率,即径向速度)。这些是用于估计(移动)目标的速度的参数,其中i=1,...,n。
[0074]
还应注意的是,术语瞬时雷达扫描、单个雷达扫描或单个测量实例可以包括来自多普勒技术中“啁啾”的反射数据,其可以扫描超过,例如,长达2ms。这在本领域中是众所周知的。在随后的说明中,使用以下惯例和定义:
[0075]
世界坐标系
[0076]
按照惯例,使用具有固定到空间中的点的原点的世界坐标系-假设该世界坐标系不移动且不旋转。照惯例,坐标系是右手坐标系;y轴与x轴正交,指向右侧;z轴指向页面,并且相对于x轴沿负方向(顺时针方向)定义方位角;参见图1,其示出了具有原点1和非自主车辆2的这种坐标系。图1还示出了车辆形式的扩展目标2,例如,长约4.5米的对象。
[0077]
车辆坐标系
[0078]
图2示出了车辆坐标系,该车辆坐标系在本实例中具有位于主车辆4的前保险杠3的中心的原点3”。在这方面应该注意车辆坐标系的原点3”可以布置在主车辆4的不同位置。
[0079]
在本实例中,x轴平行于车辆4的纵轴,即,它在前保险杠3与后保险杠3'之间延伸,并且如果原点3”位于主车辆4的前保险杠3的中心,则与前保险杠3的中心相交。车辆坐标系是右手坐标系,y轴与x轴正交并指向右侧,z轴指向页面。按照在世界坐标系中定义的来定
义(方位角)角度。
[0080]
传感器坐标系
[0081]
图3示出了具有原点5的传感器坐标系。在图3的示例中,原点5位于雷达系统(尤其是传感器单元)5'的中心,该雷达系统可以是雷达罩。x轴垂直于传感器雷达罩,指向远离雷达罩的方向。坐标系是右手坐标系:y轴与x轴正交并指向右侧;z轴指向页面。按照在世界坐标系中定义的来定义(方位角)角度。
[0082]
假设主车辆4的速度和横摆角速度是从本领域已知的传感器测量值得知的。定义主车辆4的对地(over-the-ground,otg)速度矢量为:
[0083]vh
=[u
h vh]
t
,
[0084]
其中,uh是主车辆4的纵向速度(即,在平行于车辆坐标系的x轴方向上的速度),并且vh是主车辆4的横向速度(即,在平行于车辆坐标系的y轴方向上的速度)。更一般地说,纵向速度和横向速度分别是主车辆4的第一速度分量和第二速度分量。x轴和y轴通常分别对应于第一空间维度和第二空间维度。同样,纵向方向和横向方向分别对应于第一空间维度和第二空间维度。这些优选地(但不一定)彼此正交。
[0085]
相对于车辆坐标系的传感器安装位置和视轴角度假设相对于车辆坐标系(vcs)是已知的,其中,使用以下符号:
[0086]
x
s,vcs-相对于纵(x-)坐标的传感器安装位置
[0087]ys,vcs-相对于横(y)坐标的传感器安装位置
[0088]
γ
s,vcs-传感器视轴角。
[0089]
可以根据已知的主车辆速度和已知的传感器安装位置来确定传感器的对地(otg)速度。应当理解,可以将多于一个的传感器集成到一个车辆中并相应地进行指定。
[0090]
定义传感器otg速度矢量为:
[0091]vs
=[u
s vs]
t
,
[0092]
其中,us是传感器纵向速度,而vs是传感器横向速度,在横摆角速度为零的情况下其通常对应于第一速度分量和第二速度分量。
[0093]
在各个雷达测量实例(扫描)处,雷达传感器单元捕获来自目标的n(原始)个检测点。可以通过在传感器坐标系中表示的以下参数来描述各个检测点i=1,...,n:
[0094]ri-接近距离(或径向距离),
[0095]
θ
i-方位角,
[0096]-原始接近速率(或径向速度)。
[0097]
可以通过各个原始检测的位置处的目标otg速度矢量来描述目标平面运动:
[0098]vt,i
=[u
t,i v
t,i
]
t
,
[0099]
其中,u
t,i
表示在第i个检测点的位置处的纵向速度,并且v
t,i
表示目标在第i个检测点的位置处的横向速度,两者都是优选地(但不一定)相对于传感器坐标系。
[0100]
也可以通过下式描述目标平面运动:
[0101]vt,cor
=[ω
t x
t,cor y
t,cor
]
t
,
[0102]
其中,ω
t
表示目标的横摆角速度(角速度),x
t,cor
是目标旋转的中心的纵向坐标,y
t,cor
是目标旋转的中心的横向坐标。
[0103]
图4把目标速度矢量例示成源自例示为十字形的多个检测点6'的线,其中,检测点
6'全部位于同一刚体目标2上,并且其中,使用主车辆4上的传感器单元获取检测点6'。
[0104]
在图5中更详细地示出了一般情况,示出了位于具有旋转中心7的目标(未示出)上的三个检测点6。以与具有轴x
scs
,y
scs
的传感器坐标系重叠的方式示出了具有轴x
vcs
,y
vcs
的车辆坐标系。一起示出了检测点6(i=1)中的一个的速度矢量与其分量u
t,i
,v
t,i
。
[0105]
可以如下表示单个检测点6的接近速率方程:
[0106][0107]
其中,表示接近速率,即如图5所例示的,传感器坐标系的原点与检测点6之间的距离的变化率。可以通过方位角θ
i=1
和径向距离r
i=1
(检测点的接近距离,即原点与检测点之间的距离)的值来描述检测点6的位置。
[0108]
为简化符号,可以把补偿接近速率定义成:
[0109][0110]
其中,表示补偿了主车辆4的速度的第i个检测点的接近速率。
[0111]
还可以把补偿接近速率表示成:
[0112][0113]
也可以以矢量符号把补偿接近速率表示成:
[0114][0115]
把所谓的速度分布方程(或接近速率方程)定义成:
[0116][0117]
其中c
t
代表接近速率的第一(例如,纵向)系数或分量,并且s
t
代表接近速率方程的第二(例如,横向)系数或分量。注意,优选地,系数c
t
、s
t
相对于方位角是不变的,至少对于与多个检测点所指目标的位置相对应的方位角范围是不变的,并且在此基础上已经确定了系数。这意味着假设速度分布方程不仅对特定检测点有效,而且对方位角的范围有效。因此,使用接近速率方程可以容易地确定相对于特定角度范围的任何方位角的接近速率。接近速率是本公开的一般意义上的估计速度的示例。
[0118]
如本领域技术人员所理解的,实际上,通常从多个检测点估计“真实”系数c
t
、s
t
。这些估计表示成和并且使用例如迭代(重新)加权最小二乘法来估计。在下文中,描述了用于估计系数c
t
、s
t
的示例方法。
[0119]
步骤1
[0120]
在初始步骤中,该方法包括发射雷达信号并从由所述雷达传感器单元捕获的多个雷达检测测量确定在一个测量实例处的多个雷达检测点。各个雷达检测点至少包括方位角θi和接近速率其中,该接近速率表示传感器单元与目标之间的距离在第i个检测点位置处的变化速率(参见图4)。可以理解的是,方位角θi描述了第i个检测点的角位置。如图4所示,假设多个检测点位于单个目标上(这种目标通常被称为分布式目标)。该目标是对象。
[0121]
步骤2
[0122]
补偿接近速率被确定成:
[0123]
[0124]
其中,us表示传感器单元的第一(例如,纵向)速度分量,并且其中,vs表示传感器单元的第二(例如,横向)速度分量。补偿接近速率是补偿了主车辆速度的接近速率。因此,补偿接近速率可以被解释成目标在第i个检测点的位置处的有效速度。补偿接近速率对应于目标的估计速度。
[0125]
步骤3
[0126]
根据步骤1和步骤2的结果,优选地通过使用迭代重加权最小二乘(irls)法(也可以是普通最小二乘)来确定目标的速度分布方程的第一系数c
t
的估计以及目标的速度分布方程的第二系数s
t
的估计该迭代重加权最小二乘(irls)法包括至少一次迭代并将权重wi应用于雷达检测点,其中由下式表示目标的速度分布方程:
[0127][0128]
例如,通过普通最小二乘法(ols)的解初始化irls法。这是通过第一计算进行的:
[0129][0130]
其中,表示i=1,2...n的补偿接近速率的矢量。使用下式来计算的初始解:
[0131][0132]
然后,通过下式计算初始残差:
[0133][0134]
然后按照下式计算残差的方差:
[0135][0136]
接下来,计算估计和的方差的估计:
[0137][0138]
其中
[0139][0140]
利用初始解,可以根据残差来计算权重wi∈[0;1],其中,可以使用预定义的阈值来确保很好地定义权重。
[0141]
然后将权重wi排列在对角矩阵w中,并且给定第一次迭代的系数的估计如下:
[0142][0143]
步骤4
[0144]
根据第一次迭代的解,确定速度分布的估计通过下式表示:
[0145][0146]
其中,根据步骤1确定方位角θi,并且根据步骤3(初始解)确定第一系数的估计和
第二系数的估计按照下式计算新残差:
[0147][0148]
然后按照下式计算新残差的方差:
[0149][0150]
其中
[0151][0152]
其中,表示相对于残差的一阶导数,其中,n表示检测点的数量。
[0153]
接下来,按照下式计算估计和的方差的估计:
[0154][0155]
其中,可以将方差与停止标准(例如,阈值)进行比较,以便决定是否执行进一步的迭代以确定估计系数和以这种方式,可以获得系数和的最终解。
[0156]
可以表明,如果目标2沿直线移动(线性移动),则第一估计系数和第二估计系数分别与在第一空间维度和第二空间维度(即,x方向和y方向)中的速度的部分相对应,即是:
[0157][0158][0159]
其中是第i个检测点在x方向的速度分量,是第i个检测点在y方向的速度分量。在图5中,这些速度分量被表示成检测点6中的一个,即i=1,其中且
[0160]
在目标具有非的零横摆角速度的情况下,即ω
t
不为零,可以把相对于第一空间维度和第二空间维度的速度分量表示成:
[0161][0162]
其中,x
t,i
是第i个检测点的第一坐标,y
t,i
是第i个检测点的第二坐标。
[0163]
然后,可以把各个检测点的接近速率方程表示成:
[0164][0165]
其中,由于
[0166]yt,i cosθi=r
t,i sinθ
i cosθi=x
t,i sinθi,
[0167]
该方程可以被简化成:
[0168][0169]
回想一下,接近速率方程通常被定义成:
[0170][0171]
与包括横摆角速度的接近速率方程的公式的比较表明,可以分别把所估计的第一系数和第二系数表示成
[0172][0173][0174]
因此,可以把第i个检测点的速度表示成:
[0175][0176][0177]
横摆角速度通常是未知的,但是可以被估计。考虑到这种估计,可以把在第i个检测点处的估计速度表示成:
[0178][0179]
其中,相对于横摆角速度的速度部分可以被识别成:
[0180][0181]
其中,第二坐标-y
t,i
在第一空间维度x中,并且第一坐标x
t,i
在第二空间维度y中,即第一坐标和第二坐标把第i个检测点的位置限定成(x
t,i
,y
t,i
),其中第二坐标被倒置。
[0182]
在更紧凑的表示法(notation)中,可以把在第i个检测点处的估计速度表示成:
[0183][0184]
其中,该估计速度可以被设定成等于速度分布方程的估计补偿接近速率,如上面进一步说明的。
[0185]
第i个检测点的估计速度的不确定性估计优选地被定义成:
[0186][0187]
其中,是二维矩阵,是二维矩阵且是不确定性估计的第一部分,并且是二维矩阵且是不确定性估计的第二部分。这种估计以及两个部分优选地是平方数字,这避免了估计的负值。矩阵还优选地表示相对于第一空间维度和第二空间维度的离散度(dispersion)。虽然不确定性估计在此定义为第一部分和第二部分的总和,但是第一部分和第二部分的其它组合也是可能的,以便确定不确定性估计。
[0188]
第一部分表示相对于速度分布方程的第一估计系数和第二估计系数的不确定性。因此,第一部分可以被解释成表示相对于速度分布的解的不确定性。这可以表示成:
[0189][0190]
其中,是第一估计系数的不确定性估计,是第二估计系数的不确定性估计,并且是第一估计系数与第二估计系数之间的交叉不确定性估计。以这种方式,第一部分通常对应于协方差矩阵。
[0191]
可以进一步把第一部分定义成:
[0192][0193]
其中,协方差部分表示第一估计系数和第二估计系数的协方差矩阵,并且偏差部分表示第一估计系数和第二估计系数的偏差。
[0194]
可以把协方差部分表示成:
[0195][0196]
其中,是第一估计系数的方差估计,是第二估计系数的方差估计,并且是第一估计系数和第二估计系数的协方差估计。
[0197]
如前所述,优选地可以把协方差部分确定成:
[0198][0199]
考虑到偏差部分,可以给出一般定义:
[0200][0201]
其中,y表示补偿接近速率k表示一些常数。此外,矩阵x与之前相同,即:
[0202][0203]
尤其是,可以把偏差部分定义成:
[0204][0205]
其中
[0206][0207]
其中,k
ols_bias_scale
是缩放校准参数,k
c_var_bias
是第一估计系数的偏移校准参数,并且k
s_var_bias
是第二估计系数的偏移校准参数。
[0208]
注意,偏差部分优选地是第一估计系数和第二估计系数的协方差矩阵以及附加校准参数的函数。
[0209]
考虑到不确定性估计的第二部分第二部分可以定义成:
[0210][0211]
其中,是横摆角速度的估计不确定性。
[0212]
为了避免动态估计横摆角速度的不确定性,可以依赖于预定的不确定性。这可以在假设对象的横摆角速度有界的情况下完成。例如,典型交通对象(例如,车辆)的横摆角速度通常不超过每秒30度。然后可以将横摆角速度建模成分布(概率密度函数(probability density function),即pdf),例如具有零均值和横摆角速度ω
t
的最大值ω
t_max
的均匀分布:
[0213][0214]
可以通过校准参数预先把横摆角速度的最大值(也称为极值)确定成:
[0215]
ω
t_max
=k
max_yaw_rate
。
[0216]
根据标准数学,均匀pdf的方差是:
[0217][0218]
然后可以将横摆角速度的不确定性设置成方差,即是:
[0219][0220]
因此,不确定性估计的第二部分是预先确定的,且表示成:
[0221][0222]
其中,应理解,第二部分表示估计速度相对于角速度、在第二空间维度y中的第一坐标x
t,i
以及在第一空间维度x中的第二坐标y
t,i
的不确定性。
[0223]
图6给出了上述方法的一些方面的概述。各个框对应于该方法的示例性步骤,其中,在框内表示该步骤。虚线框表示对应的步骤仅是可选的。
[0224]
已经在两个不同的示例情景中评估了所提出的不确定性估计。为了对不确定性估计的有效性进行量化,将归一化估计误差平方(nees)用作度量。该度量通常可以被解释成估计速度与估计的方差或不确定性估计之间的一致性的度量。一般定义可以是:
[0225][0226]
其中,表示所估计的协方差矩阵的倒数,ei表示第i个检测点的nees。协方差矩阵是估计的协方差矩阵或者所提出的不确定性估计
[0227]
如果nees的预期值等于协方差矩阵的维数n(此处n=2),则估计速度和估计的协方差矩阵是一致的:
[0228]
h0:e(ei)=n。
[0229]
在两个示例情景中,已经使用1000次蒙特卡罗(monte carlo)迭代执行了对运动对象的模拟。在第一情景中,模拟了直线运动对象。当使用估计的协方差矩阵时,预期的nees是e(ei)=3.01,其在95%的显着性水平上不一致。当使用所提出的不确定性估计e(ei)=2.03时,其在95%的显着性水平上一致。
[0230]
在第二情景中,模拟了横摆对象。当使用估计的协方差矩阵时,这是完全不一致的。将其用作“不确定性估计”对于跟踪应用来说将是危险的。然而,当使用所提出的不确定性估计时,则e(ei)=2.04,其在95%的显着性水平上很好地一致。因此,所提出的不确定性估计可以用于例如安全跟踪应用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1