一种保证模型桩贯入垂直度和角度的辅助装置及贯入方法与流程
1.本发明涉及建筑桩基工程技术领域,具体涉及一种保证模型桩贯入垂直度和角度的辅助装置及贯入方法。
背景技术:
2.桩是一种提高地基承载力的有效手段。桩的种类有很多,其中的预制桩由于具有施工速度快、承受荷载大、坚固耐久等特点被广泛应用于各大基础工程建设中。但这种桩在施工时有可能对周围的土体或结构物产生会负面影响,因为预制桩一般是用沉桩设备将桩打入、压入或振入土中的。
3.在岩土工程领域的科学研究中,桩基的承载特性是工程师们特别关注的课题之一。研究手段包括理论分析、数值模拟等,而这两者都需要准确的试验数据进行参数验证和对比分析,因此如何准确地开展试验就是这类科学问题研究的关键。
4.桩基的承载特性包括水平向承载力研究和竖向承载力研究,这两类研究都需要将模型桩竖直插入模型地基中,其中进行水平承载力研究时,还需要将模型桩上已经粘贴的应变计正对加载设备,否则可能造成测量不准确。另外,模型桩的静压或锤击入土过程也会对承载力产生不小的影响。因此,在桩基承载力特性模型试验领域,需要一种既能模拟沉桩过程,又能保证模型桩贯入垂直度和角度的辅助装置和使用方法。
5.如中国发明专利:一种劲性复合桩成桩加载模型试验装置和方法,申请号:cn202010255843.1 ,包括模型箱、反力柱、芯桩贯入器和芯桩定位器,通过芯桩贯入器将芯桩垂直稳定地贯入到未初凝的水泥土桩内,并在芯桩定位器的配合下,保证芯桩在竖向方向不会发生偏移,通过竖向加载装置在芯桩周围的水泥土终凝后,对于劲性复合桩施加竖向荷载;该发明将模型芯桩连续贯入到未初凝的水泥土模型桩中,模型芯桩的贯入速率可控,并且能够保证桩身在贯入过程中的垂直度;在劲性复合模型桩成桩后,该发明还可以实现对于桩体的竖向加载,对于其竖向承载机理进行研究。
6.如中国发明专利申请文件:一种用于桩基离心试验的压桩垂直度控制贯入装置,申请号 cn202110138614.6 ,该装置包括模型桩、加载贯入系统、垂直度控制系统和离心机模型箱。所述的垂直度控制系统包括平行设置的固定上板与固定下板,二者均为圆环状板,模型桩位于圆环状板的圆心处;在固定上板上沿径向开有4道导向槽,在固定下板上与固定上板对应位置也开有相同的导向槽,用于为导向板提供约束;导向板的上下两端均位于导向槽内,可以在导向槽中沿径向运动,从而适应不同桩径的安装要求。通过该装置可以将桩基贯入海床土体,并且可以通过改变导向板的间距进而适合不同桩径的压桩入土,并在贯入过程中保证压桩的垂直度,以满足后期的试验测试要求。
技术实现要素:
7.有鉴于此,本发明旨在提出一种保证模型桩贯入垂直度和角度的辅助装置及贯入方法,从而弥补现有技术的不足,以解决无法模拟锤击或静压情况的技术问题。
8.为实现上述目的,本发明提出的其中一个技术方案是:一种保证模型桩贯入垂直度和角度的辅助装置,包括有:模型箱,模型箱上端开口,模型箱内填充有砂土层;所述模型箱上设置有至少两组的x轴向驱动轨道系统,每两组所述x轴向驱动轨道系统相对设置在模型箱的开口处,用于驱动辅助装置沿模型箱的x轴方向运动;每两组所述x轴向驱动轨道系统之间设置有至少一组y轴向驱动轨道系统,用于驱动辅助装置沿模型箱的y轴方向运动;所述y轴向驱动轨道系统上设置有至少一组z轴向驱动轨道系统,用于驱动辅助装置沿模型箱的z轴方向运动;所述z轴向驱动轨道系统上设置有夹桩机构,用于将模型桩夹载在夹桩机构上,模拟现实施工转态下的桩贯入至砂土层中的沉桩过程。
9.所述夹桩机构上设有可拆装的锤击辅助模拟模块和/或静压辅助模拟模块,用于在模拟沉桩过程中增加锤击和/或静压的模拟情况;所述y轴向驱动轨道系统与z轴向驱动轨道系统连接处设置有角度调节机构。
10.进一步的,x轴向驱动轨道系统、y轴向驱动轨道系统和z轴向驱动轨道系统结构相同,x轴向驱动轨道系统由x轴轨道和安装在x轴轨道上的x轴滑块构成,y轴向驱动轨道系统由y轴轨道和安装在y轴轨道上的y轴滑块构成,z轴向驱动轨道系统由z轴轨道和安装在z轴轨道上的z轴滑块构成。
11.进一步的,所述夹桩机构包括固定安装在z轴向驱动轨道系统的z轴滑块上的夹桩底座和夹桩盖构成;所述夹桩底座和夹桩盖通过手拧螺栓,将模型桩夹紧在夹桩底座和夹桩盖之间。
12.进一步的,所述夹桩盖中部开有长条形的窗口,在窗口的内部前后均设置有瞄准线,当模型桩上的应变计中线与两条瞄准线形成三条线处于同一平面内时,模型桩则为垂直且未发生偏转的状态,此时模型桩上的应变计已经正对加载设备。
13.进一步的,所述锤击辅助模拟模块包括:锤击安装底座,锤击安装底座安装在夹桩底座上;轨道柜,轨道柜安装在锤击安装底座,且轨道柜与锤击安装底座相互垂直;凹槽,每个凹槽开设置在轨道柜内壁的表面上,且每组凹槽相对设置;驱动件,驱动件安装在轨道柜上端,且驱动件的输出端可穿过轨道柜上端的板体;重锤,重锤与驱动件的输出端相连接;导向凸起,导向凸起位于重锤两侧,且导向凸起嵌入于凹槽内。
14.进一步的,当驱动件为旋转输出驱动件时,驱动件输出端与重锤之间还可以设置有导向机构。
15.进一步的,所述导向机构包括:螺旋导向柱,所述螺旋导向柱位于驱动件输出端与重锤之间;导向凹槽,所述导向凹槽开在螺旋导向柱的外表面上;安装孔,所述安装孔开在重锤的表面上;导向块,所述导向块位于安装孔内壁表面上,且导向块嵌入导向凹槽内,使导向块可沿导向凹槽的轨迹运动;
进一步的,所述静压辅助模拟模块包括:u型槽,u型槽为具有连续齿条的槽体;静压安装底座,所述静压安装底座安装在夹桩底座上;安装板,至少一组所述安装板相互平行安装静压安装底座上;双输出旋转驱动件,双输出旋转驱动件安装在一组安装板之间,且双输出旋转驱动件的输出端均穿过相对应的安装板;偏心轮,每个偏心轮的中心安装在相对应的双输出旋转驱动件的输出端上;偏心导向柱,每个偏心导向柱安装在相对应的安装板上;偏心杆,每个偏心杆的一端铰接安装在相对应的偏心轮上,其另一端上的偏心导向凸起位于u型槽的连续齿条内;偏心杆长孔,偏心杆长孔开设在偏心杆上;偏心导向柱位于偏心杆长孔内。
16.进一步的,所述角度调节机构包括:角度调节安装底座,角度调节安装底座固定安装在y轴滑块上;角度调节长孔,角度调节长孔位于u型槽上;连杆,连杆的一端铰接在角度调节安装底座上,另一端滑动连接在角度调节长孔内;角度调节安装底座的一端与角度调节长孔铰接,使角度调节安装底座、角度调节长孔和连杆构成实现调节角度和稳定支撑装置的三角形形状。
17.本发明提出的其中另一个技术方案是:一种运用上述的模型桩贯入的辅助装置的模型桩贯入方法,该方法包括:s1、模型箱内填充有砂土层;s2、模型桩通过夹桩机构,夹载在装置上;s3、通过调节x轴向驱动轨道系统、y轴向驱动轨道系统和z轴向驱动轨道系统,模型桩选定指定位置和高度;s4、将s3中的模型桩贯入到s1中的模型箱中,实现不同位置和不同高度土面的实验;s5、装置通过角度调节机构进行角度调节,调整模型桩的贯入角度;s6、夹桩机构上可选择安装锤击辅助模拟模块或静压辅助模拟模块;s7、如选择安装锤击辅助模拟模块,通过重锤的往复自由落体运动实现模型桩的打入,模拟实际油锤打桩机打桩过程,并通过改变重锤的重量来实现不同锤击能量的模拟;s8、如选择安装静压辅助模拟模块,模型桩通过循环往复的运动模式,模拟实际桩基的静压过程;s9、采集模型桩上应变片的数据反馈,为研究打桩施工过程及其桩基的承载力问题提供数据。
18.本发明的有益效果是:通过平面轨道和垂向轨道的调节,可以在模型箱中的不同位置和不同高度土面上将模型桩贯入;通过使用锤击模块和静压模块模拟实际打桩过程;锤击模块是通过重锤的“缓慢螺旋上升、快速垂直下降”循环往复自由落体运动,实现模型桩的打入,这种贯入方法
也跟实际的油锤打桩机保持一致,另外还可以通过改变重锤的重量来实现不同锤击能量的模拟;静压模块是类似于一种“蚯蚓蠕动”的快慢交替的运动模式,与实际桩基的静压过程也更为相似;通过夹桩盖上的两条瞄准线也可以实现模型桩与加载设备的对准,这就为研究打桩施工过程及其桩基的承载力问题研究提供可靠保障,保证了试验数据的准确可靠。并且本发明能够提高试验工作效率,结构简单,性能可靠,制作简便。
附图说明
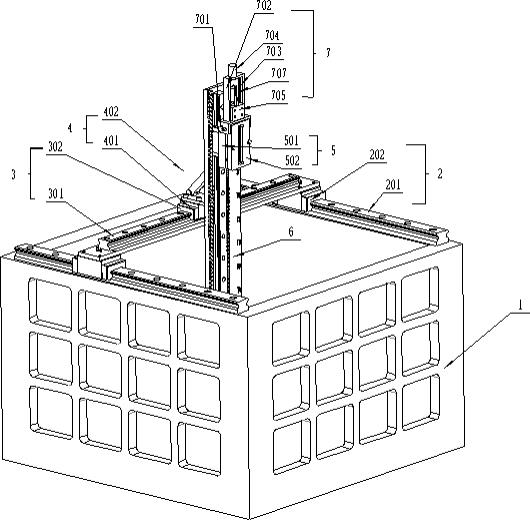
19.图1是实施例1的结构示意图;图2是实施例1中锤击辅助模拟模块的结构示意图;图3是实施例1中部分导向机构及其重锤的结构示意图;图4是实施例1中的瞄准线的结构示意图;图5是实施例2中的静压辅助模拟模块的结构示意图;图6是实施例2中的部分静压辅助模拟模块的结构示意图;图7是实施例3中的角度调节机构的结构示意图;图8是实施例1中的导向块运动到导向凹槽相交处的状态示意图;图9是实施例2中的静压辅助模拟模块运动状态示意图。
20.其中:1、模型箱;2、x轴向驱动轨道系统;201、x轴轨道;202、x轴滑块;3、y轴向驱动轨道系统;301、y轴轨道;302、y轴滑块;4、z轴向驱动轨道系统;401、z轴轨道;402、z轴滑块;5、夹桩机构;501、夹桩底座;502、夹桩盖;6、模型桩;7、锤击辅助模拟模块;701、锤击安装底座;702、轨道柜;703、凹槽;704、驱动件;705、重锤;706、导向凸起;707、导向机构;7071、螺旋导向柱;7072、导向凹槽;7073、安装孔;7074、导向块;7075、安装柱;8、静压辅助模拟模块;801、静压安装底座;802、安装板;803、双输出旋转驱动件;804、偏心轮;805、偏心导向柱;806、偏心杆;8061、偏心导向凸起;807、u型槽;8071、连续齿条;808、偏心杆长孔;9、瞄准线;10、角度调节机构;1001、角度调节安装底座;1002、角度调节长孔;1003、连杆。
具体实施方式
21.下面结合附图1-附图7对本发明作进一步详细描述。
22.实施例1如图1-图4所示,一种保证模型桩贯入垂直度和角度的辅助装置,包括有:如图1所示,模型箱1,模型箱1上端开口,模型箱1内填充有砂土层;在进行实验前,将模型箱1内填充满砂土层,其砂土层可根据需要模拟的实际土层要求进行替换或者配置,保证模拟的过程更接近实际情况,提高模拟的精度。
23.所述模型箱1上设置有至少两组的x轴向驱动轨道系统2,每两组所述x轴向驱动轨道系统2相对设置在模型箱1的开口处,用于驱动辅助装置沿模型箱1的x轴方向运动;每两组所述x轴向驱动轨道系统2之间设置有至少一组y轴向驱动轨道系统3,用于驱动辅助装置沿模型箱1的y轴方向运动;所述y轴向驱动轨道系统3上设置有至少一组z轴向驱动轨道系统4,用于驱动辅助装置沿模型箱1的z轴方向运动;具体的,x轴向驱动轨道系统2、y轴向驱动轨道系统3和z轴向驱动轨道系统4结构相同,x轴向驱动轨道系统2由x轴轨道201和安装在x轴轨道201上的x轴滑块202构成,y轴向驱动轨道系统3由y轴轨道301和安装在y轴轨道301上的y轴滑块302构成,z轴向驱动轨道系统4由z轴轨道401和安装在z轴轨道401上的z轴滑块402构成。
24.当需要将该辅助装置移动到指定位置时,是可以通过x轴向驱动轨道系统2、y轴向驱动轨道系统3和z轴向驱动轨道系统4实现移动定位。
25.同时,x轴滑块202、y轴滑块302、z轴滑块402内可设置驱动件,实现x轴滑块202可自动沿x轴轨道201运动,y轴滑块302可自动沿y轴轨道301运动,z轴滑块402可自动沿z轴轨道401运动。
26.x轴滑块202、y轴滑块302、z轴滑块402内也设置有定位传感器,可实时反馈定位的数据,便于后续模拟数据采集和分析。
27.但x轴滑块202沿x轴轨道201的运动、y轴滑块302沿y轴轨道301的运动或z轴滑块402沿z轴轨道401的运动也不排除手动调节。
28.如图1所示,所述z轴向驱动轨道系统4上设置有夹桩机构5,用于将模型桩6夹载在夹桩机构5上,模拟现实施工转态下的桩贯入至砂土层中的沉桩过程。
29.所述夹桩机构5上设有可拆装的锤击辅助模拟模块7,用于在模拟沉桩过程中增加锤击模拟情况;进一步的,所述夹桩机构5包括固定安装在z轴向驱动轨道系统4的z轴滑块402上的夹桩底座501和夹桩盖502构成;具体的,所述夹桩底座501和夹桩盖502通过手拧螺栓,将模型桩6夹紧在夹桩底座501和夹桩盖502之间。如需要更换模型桩6时,可通过旋开手拧螺栓,完成替换工作。
30.进一步的,如图4所示,所述夹桩盖502中部开有长条形的窗口,在窗口的内部前后均设置有瞄准线9,当模型桩6上的应变计中线与两条瞄准线9形成三条线处于同一平面内时,模型桩6则为垂直且未发生偏转的状态,此时模型桩上的应变计已经正对加载设备。
31.进一步的,如图3所示,所述锤击辅助模拟模块7包括:锤击安装底座701,锤击安装底座701安装在夹桩底座501上;具体的,在锤击安装底座701下部设有长孔,长孔用于将锤击辅助模拟模块7固定在夹桩底座501上,另外,长孔的意义还在于当模型桩桩径发生变化时,锤击辅助模拟模块7仍可以与桩轴线保持同轴心。
32.轨道柜702,轨道柜702安装在锤击安装底座701,且轨道柜702与锤击安装底座701相互垂直;凹槽703,每个凹槽703开设置在轨道柜702内壁的表面上,且每组凹槽703相对设置;
驱动件704,驱动件704安装在轨道柜702上端,且驱动件704的输出端可穿过轨道柜702上端的板体;重锤705,重锤705与驱动件704的输出端相连接;导向凸起706,导向凸起706位于重锤705两侧,且导向凸起706嵌入于凹槽703内。
33.具体的,驱动件704可以为旋转输出驱动件,如电机、马达等。驱动件704也可以为直线输出驱动件,如气缸、直线电机等。
34.当驱动件704为直线输出驱动件时,驱动件704的输出端只需与重锤705相连接,即可实现重锤705的上下移动,模拟锤击状态,重锤705两侧的导向凸起706可沿凹槽703上下运动,实现导向的作用。
35.当驱动件为旋转输出驱动件时,驱动件704输出端与重锤705之间还可以设置有导向机构707。从而实现间歇式重锤705锤击状态。
36.具体的,所述导向机构707包括:螺旋导向柱7071,所述螺旋导向柱7071位于驱动件704输出端与重锤705之间;导向凹槽7072,所述导向凹槽7072开在螺旋导向柱7071的外表面上;具体的,导向凹槽7072包括竖直槽和螺旋槽,竖直槽和螺旋槽一体成型,其中螺旋槽用于重锤705螺旋上升,竖直槽用于直线竖直下降。
37.安装孔7073,所述安装孔7073开在重锤705的表面上;导向块7074,所述导向块7074活动安装在安装孔7073内壁表面上,且导向块7074嵌入导向凹槽7072内,使导向块7074可沿导向凹槽7072的轨迹运动。
38.具体的,安装孔7073内壁表面上具有安装柱7075,导向块7074的中心处套装在安装柱7075上,在导向凹槽7072内运动时,可以随导向凹槽7072槽体的变化实现转动,始终嵌入在导向凹槽7072内。
39.具体的,当驱动件为旋转输出驱动件时,驱动件704带动重锤705沿导向机构707旋转上升,垂直落下,进而模拟了锤击状态。
40.如图8所示,导向块7074的形状类似于椭圆形,当导向块7074螺旋上升运动到导向凹槽7072的相交处时,其导向块7074的长轴(即椭圆的长轴)的尺寸大于导向凹槽7072的宽度,导向块7074只能沿螺旋槽的运动轨迹方向螺旋上升,进而保证重锤705螺旋上升运动到导向凹槽7072的相交处不下落,同时,当导向块7074竖直下降运动到导向凹槽7072的相交处时,也正因为导向块7074的形状的原因,导向块7074只能沿竖直槽的运动轨迹方向竖直下落,进而保证重锤705竖直下落运动到导向凹槽7072的相交处顺利向下运动,不会出现运动到螺旋槽内或卡死的情况。
41.同时,在所述重锤705的外侧还设有螺纹孔,可以安装配重,实现不同锤击能量的模拟。
42.实施例2如图5-图6所示,与实施例1不同的是,当选择安装上静压辅助模拟模块8时,在夹桩机构5上设有可拆装的静压辅助模拟模块8,用于在模拟沉桩过程中增加静压状态的模拟情况。
43.所述静压辅助模拟模块8包括:u型槽807,u型槽807为具有连续齿条8071的槽体;
具体的,连续齿条8071的每个齿边缘均为圆弧形;静压安装底座801,所述静压安装底座801安装在夹桩底座501上;在静压安装底座801下部设有长孔,长孔用于将静压辅助模拟模块8固定在夹桩底座501上,另外,长孔的意义还在于当模型桩桩径发生变化时,静压辅助模拟模块8仍可以与桩轴线保持同轴心。
44.安装板802,至少一组所述安装板802相互平行安装静压安装底座801上;双输出旋转驱动件803,双输出旋转驱动件803安装在一组安装板802之间,且双输出旋转驱动件803的输出端均穿过相对应的安装板802;具体的,双输出旋转驱动件803可为电机、马达等旋转驱动件。
45.偏心轮804,每个偏心轮804的中心安装在相对应的双输出旋转驱动件803的输出端上;偏心导向柱805,每个偏心导向柱805安装在相对应的安装板802上;偏心杆806,每个偏心杆806的一端铰接安装在相对应的偏心轮804上,其另一端上的偏心导向凸起8061位于u型槽807的连续齿条8071内;偏心杆长孔808,偏心杆长孔808开设在偏心杆806上;偏心导向柱805位于偏心杆长孔808内。
46.如图7所示,其具体的工作原理为:双输出旋转驱动件803带动偏心轮804转动,进而带动偏心杆806转动,偏心杆806另一端上的偏心导向凸起8061沿连续齿条8071运动,实现模拟静压的状态。
47.具体的,如图9所示,连续齿条8071的每个齿边缘均为圆弧形,便于偏心导向凸起8061可以从上一个齿内顺畅的运动到下一个齿内,同时,连续齿条8071的每个齿内部为矩形,避免出现偏心导向凸起8061脱离连续齿条8071的情况,从而实现双输出旋转驱动件803有一个向下的运动趋势,实现模拟静压的状态。
48.实施例3如图7所示,在实施例1或者实施例2的基础上,还具有角度调节机构10,其结构为:所述y轴向驱动轨道系统3与z轴向驱动轨道系统4连接处设置有角度调节机构10。
49.角度调节安装底座1001,角度调节安装底座1001固定安装在y轴滑块302上;角度调节长孔1002,角度调节长孔1002位于u型槽807上;连杆1003,连杆1003的一端铰接在角度调节安装底座1001上,另一端滑动连接在角度调节长孔1002内;角度调节安装底座1001的一端与角度调节长孔1002铰接,使角度调节安装底座1001、角度调节长孔1002和连杆1003构成实现调节角度和稳定支撑装置的三角形形状。
50.其具体的工作原理为:当需要调节角度时,可通过连杆1003的一端在角度调节长孔1002内滑动,实现该辅助装置的角度调整,以满足某种特定工况下斜向插桩的需要。
51.实施例4一种运用上述实施例1-实施例3任意一项所述的保证模型桩贯入垂直度和角度的辅助装置的贯入方法,s1、模型箱1内填充有砂土层;s2、模型桩6通过夹桩机构5,夹载在装置上;
s3、通过调节x轴向驱动轨道系统2、y轴向驱动轨道系统3和z轴向驱动轨道系统4,模型桩选定指定位置和高度;s4、将s3中的模型桩6贯入到s1中的模型箱1中,实现不同位置和不同高度土面的实验;s5、装置通过角度调节机构10进行角度调节,调整模型桩6的贯入角度;s6、夹桩机构5上可选择安装锤击辅助模拟模块7或静压辅助模拟模块8;s7、如选择安装锤击辅助模拟模块7,通过重锤的往复自由落体运动实现模型桩6的打入,模拟实际油锤打桩机打桩过程,并通过改变重锤的重量来实现不同锤击能量的模拟;s8、如选择安装静压辅助模拟模块8,模型桩6通过循环往复的运动模式,模拟实际桩基的静压过程;s9、采集模型桩6上应变片的数据反馈,为研究打桩施工过程及其桩基的承载力问题提供数据。
52.其中,具体的,在竖向加载试验中,保证模型桩6其垂直度;在水平加载试验不仅要保证模型桩6其垂直度,应变片的方向还要正对水平加载试验中的的液压缸伸缩端,这种操作方法才能保证试验结果的准确性。
53.以上对本发明的一个实施例进行了详细说明,但内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明申请范围所作的均等变化与改进等,均应仍归属于本发明的专利涵盖范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1