海面舰船目标SAR成像仿真方法及设备与流程
海面舰船目标sar成像仿真方法及设备
技术领域
1.本发明涉及一种海面舰船目标sar成像仿真方法及设备。
背景技术:
2.极化sar图像的极化特征分析长期以来一直是复杂场景遥感的关注点,其中既有确定性目标,也有随机介质,例如在海上移动的舰船。由于极化特征携带了有关舰船目标方位和几何结构的丰富信息,人们从极化信号中对舰船检测进行了广泛的研究。特别是,通过访问从高分-3和sentinel-1星载sar获取的丰富舰船数据集,对开发新的舰船检测算法非常有用。以往对舰船检测的研究几乎都是建立在图像的基础上,在提取特征向量后,将sar图像的大数据集馈送给检测器或分类器。舰船场景的依赖性会以某种方式持续影响检测和分类率。然而,sar的姿态和方位很容易受到影响,导致在复杂背景下,单幅sar图像即使是从稳健的极化特征中检测和分类舰船,仍然是一个挑战。因此,有必要系统地研究复杂场景中的散射机制。
技术实现要素:
3.本发明的目的在于提供一种海面舰船目标sar成像仿真方法及设备。
4.为实现上述发明目的,本发明提供一种海面舰船目标sar成像仿真方法,包括以下步骤:
5.a、建立sar信号模型,构建三维目标模型;
6.b、计算sar回波的后向散射,对回波进行并行处理;
7.c、对海面舰船目标进行雷达图像仿真。
8.根据本发明的一个方面,在所述步骤(b)中,包括:
9.步骤1、利用数值aiem近似获取入射波引起的表面场;
10.步骤2、结合射弹射线sbr技术计算二阶再辐射场;
11.步骤3、采用几何绕射理论gtd计算合成孔径雷达sar在合成孔径中收集到的来自边缘和楔形物的绕射场;
12.步骤4、在计算后向散射场时,采用基于gpu并行的加速技术对回波进行并行处理。
13.根据本发明的一个方面,在所述步骤(a)中,假设单色平面电磁波的单位振幅为:
[0014][0015]
其中ki=2π/λ是入射空间波束,λ是入射波长,沿波传播方向指向的单位矢量,是从原点到sar的向量。由于粗糙表面散射而产生的散射场与入射场的关系如下:
[0016][0017]
s是由表面参数(粗糙度、介电特性等)和雷达参数确定的散射矩阵。对于后向散
射,
[0018]
结合天线增益建立sar信号模型,sar回波信号模型为:
[0019][0020]
其中es(τ,η)表示散射场,τ和η分别表示快时间和慢时间;表示卷积操作,c是光速,pr(
·
)是脉冲函数,ar是调频率,fc是载频,ga是天线增益方向图。r(η)是随着慢时间变化的斜距;
[0021]
根据本发明的一个方面,天线方向图为:
[0022][0023]
其中,ηc是天线中心照射目标时的时间,βa是波束宽度,φd是波束中心和雷达与目标之间的夹角,φd随着慢时间η变化。
[0024]
根据本发明的一个方面,在所述步骤1中,首先建立局部坐标系如下:
[0025][0026][0027][0028]
其中,是指向外表面的单位向量,将入射射线分解为和分量。
[0029]
根据本发明的一个方面,在完成局部坐标系建立后,由ka方法得到:
[0030][0031][0032]
其中,rv,rh是垂直和水平极化的菲涅耳反射系数;ei表示入射电场;hi表示入射磁场;表示表面电流;表示表面磁流;
[0033]
通过数值aiem获得照射区域的表面电流密度和磁流密度为:
[0034]
[0035][0036]
其中,
[0037][0038][0039][0040][0041][0042][0043][0044][0045]
是曲面散度算子。下标t用于表示传输介质中的量,εr,μr分别表示入射介质和传输介质的介电常数和磁导率之比。
[0046]
入射介质和传输介质的格林函数为:
[0047][0048][0049]
则
[0050][0051]
其中a是照射区域,ηi是固有阻抗,是从到的距离长度。
[0052]
根据表面电流密度,通过stratton-chu公式计算散射场。
[0053]
根据本发明的一个方面,在所述步骤3中,使用ptd计算介质边缘上的衍射电流为:
[0054][0055][0056]
其中,为与边界相切的单位向量;γ为边缘与入射光或衍射光方向之间的角度;δ为入射方向和楔块顶面之间的角度;rv′
和rh′
为修正的表面反射系数;f(
·
)和g(
·
)为衍射系数;
[0057]
由衍射电流得出的衍射场为:
[0058][0059]
其中,r为边界c到观测点的距离;dl为沿着长度c的微分长度;
[0060]
利用衍射域场纠正得到总的散射域e为es:
[0061][0062]
根据本发明的一个方面,在所述步骤4中,本发明采用并行优化方案包括:
[0063]
b1、进行光线跟踪并提取出交点信息及其反射方向;
[0064]
b2、计算并存储在当前和以前的反弹点之间的距离、多边形的局部坐标变换以及全局坐标变换矩阵;
[0065]
b3、计算每个电介质目标网格对入射线的反射系数;
[0066]
b4、进行射线波束波传播距离的归一化,平行和垂直电场利用所述步骤(b2)给出的散射域和接收平面的几何矩阵的关系投影到接收平面上;
[0067]
b5、使用cuda并行简化算法对特定sar视角下的频率分量和目标的不同角所有的散射场进行求和。
[0068]
根据本发明的一个方面,在所述步骤(c)中,使用条带距离多普勒成像技术对海面背景下的舰船目标进行雷达图像仿真。
[0069]
本发明提供了一种设备,包括存储介质和处理器,所述存储介质存储有计算机程序,所述计算机程序被所述处理器执行时实现海面舰船目标sar成像仿真方法。
[0070]
根据本发明的构思,提出一种海面舰船目标的sar成像仿真方法。该仿真算法是利用数值aiem模型计算目标的表面场。在计算二阶再辐射场时,采用了射弹射线sbr技术来提高传播路径跟踪效率。采用几何绕射理论gtd计算了合成孔径雷达sar在合成孔径中收集到的来自边缘和楔形物的绕射场,这些绕射场构成了合成孔径雷达收集到的总散射场。当sar沿方位方向移动时,当天线波束穿过目标时,会重复进行后向散射信号计算。这个过程需要大量的计算资源,但不需要对雷达截面或斑点统计进行先验假设。在回波计算过程中,进行了并行化的处理。在对海面与舰船目标进行成像仿真时,相对振幅和相位的极化信息都得到了很好的保留。
[0071]
根据本发明的一个方案,对从雷达信号发射到最终图像聚焦传输的所有信号链进
行相干集成sar几何结构能够灵活地适应不同的环境传感器路径轨迹变化下的不同sar回波获取模式。
[0072]
根据本发明的一个方案,建立全链路的sar系统仿真,该方法在简化从后向散射场到复杂单视图像的数据流方面是一致的、全极化的。
附图说明
[0073]
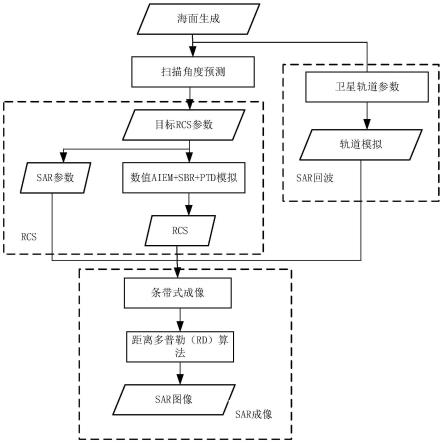
图1示意性表示、根据本发明一种实施方式的海面舰船目标sar成像仿真方法的流程图;
[0074]
图2示意性表示根据本发明一种实施方式的sar数据采集几何;
[0075]
图3示意了海洋表面样本幅度图像;
[0076]
图4示意了舰船目标的cad模型;
[0077]
图5示意性表示货船的航向和相应的hh极化模拟图像。
[0078]
图6至图9示意性表示根据本发明一种实施方式的海面舰船模拟的全极化sar图像的pauli分解(包括舰船、海面、海面与舰船的sar图像)。
具体实施方式
[0079]
为了更清楚地说明本发明实施方式或现有技术中的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅为本发明的一些实施方式,对于本领域普通技术人员而言,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0080]
下面结合附图和具体实施方式对本发明作详细地描述,实施方式不能在此一一赘述,但本发明的实施方式并不因此限定于以下实施方式。
[0081]
参见图1,本发明的海面舰船目标sar成像仿真方法,可用于复杂海况下高价值舰船目标的雷达极化散射特性研究。本方法首先建立sar信号模型,利用改进的基尔霍夫近似计算表面电流,采用了弹跳射线(sbr)技术来提高传播路径跟踪效率。采用几何绕射理论(gtd)计算了合成孔径雷达sar在合成孔径中收集到的来自边缘和楔形物的绕射场,这些绕射场构成了合成孔径雷达收集到的总散射场。在散射场的计算过程中,采用gpu并行计算提高效率。结合孔径合成过程中天线增益的变化,最后对海面舰船目标进行雷达图像仿真。本发明可以仿真复杂目标在孔径合成过程中天线增益变化的成像,满足为目标从sar进行极化检测、识别和识别图像,建立图像特征数据库的要求。
[0082]
本发明中,在信号模型建模时,假设单色平面电磁波的单位振幅为:
[0083][0084]
其中,ki=2π/λ是入射空间波数,λ是入射空间波长,表示沿波传播方向指向的单位矢量,是从原点到sar的位置向量,e
jwt
是时谐相关性因子。由于粗糙表面散射而产生的散射场与入射场的关系如下:
[0085][0086]
其中是由表面参数(粗糙度、介电特性等)和雷达参数确定的散射矩阵。入射场和散射场的简写如下:
[0087][0088]
其中h,v分别表示水平极化(te)和垂直极化(tm)。对于全极化sar,本技术通过发射和接收极化波p,q=h,v来重构散射矩阵s。
[0089]
sar复回波信号是接收到的所有散射场的相干总和,其随sar沿方位角方向以速度vs移动而变化。斜距ηc是对应于(xc,yc)的慢时间,r0是sar到目标的最短斜距,h是sar的高度。对于在瞬时慢时间或方位角位置从目标散射的sar回波信号,发射场不是平面波,而是限制在天线波束宽度βa内,以分辨率单元的中心位置为中心。
[0090]
将观测向量转换为sar数据域(τ,η),其中τ,η分别表示快时间和慢时间。也就是说,本技术将接收到的信号从空间域转换到时间域。此外,为了在不损失一般性的情况下简化说明,本技术采用极化散射场其中p,q分别表示p极化发射和q极化接收。原始数据模拟的目标之一是在电磁波与复杂目标相互作用的背景下,增强对sar散射机制的理解。
[0091]
时域中的sar回波信号由散射场与雷达系统脉冲响应或点扩展函数卷积产生(如图2所示),数学上表示为:
[0092][0093]
其中表示卷积操作;c是光速;pr(
·
)是脉冲函数;ar是调频率;fc是载频;r0是sar到目标的最短斜距;βa为波束宽度;ga是天线增益方向图,表达式如下:
[0094][0095]
其中,ηc为天线中心方位角位置,βa为波束宽度,φd为光束中心与扫描目标时在慢时间ηc的光束角度之间的角度差。
[0096]
对于成像条带,从近距离τ
min
到远距离τ
max
的延迟时间限制在一个脉冲宽度τ
p
和一个脉冲周期t
p
内。τ
min
》τ
p
,τ
max
《t
p-τ
p
。上述条件仅表示快速采样范围。脉冲重复频率(prf)满足:
[0097][0098]
其中n表示第n个脉冲;h是sar高度。
[0099]
本发明定义了一个局部切平面,在该平面上,入射场按照局部坐标系进行分解:
[0100][0101][0102][0103]
其中是指向曲面外的单位法向量。通过将入射场分解为和分量,应用改进kirchhoff近似要获得照射区域的表面电流密度:
[0104][0105][0106]
其中,rv和rh分别为垂直和水平极化的菲涅尔反射系数;和分别为入射电场和磁场,p=v,h;然而,基尔霍夫近似没有考虑阴影区域中的场。应用数值aiem近似获得照射区域的表面电流密度为:
[0107][0108][0109]
其中,
[0110][0111]
[0112][0113][0114][0115][0116][0117][0118][0119]
其中,是表面散度算子,电流的表面散度与表面电荷密度有关。入射介质和传输介质的格林函数为:
[0120][0121][0122]
在计算过程时,本发明应用了射弹射线(sbr)技术来提高传播路径跟踪效率。
[0123]
一旦表面电流密度和磁流密度已知,散射场可以通过stratton-chu公式计算。
[0124]
使用ptd(包括边缘电流或在附近产生的衍射场边缘)得到目标介质边缘上的衍射电流为:
[0125][0126][0127]
其中,为与边界相切的单位向量;γ为边缘与入射光或衍射光方向之间的角度;δ为入射方向和楔块顶面之间的角度;r
′v和r
′h为修正的表面反射系数;f和g为衍射系数;
[0128]
由衍射电流得出的衍射场为:
[0129][0130]
其中,s是从轮廓c上的一个元素到观测点的距离;dl是沿边缘不连续长度的微分长度。
[0131]
利用衍射域场纠正得到总的散射域为:
[0132][0133]
在处理流程中,利用上述回波信号的公式计算每个sar方位位置的散射场,本发明中,使用距离多普勒成像技术对海面背景下的舰船目标进行雷达图像快速仿真。
[0134]
例如,在海面的模拟中,本发明选择weibull高度概率分布:
[0135][0136]
其中k是形状参数,u是尺度参数。对于曲面rms高度σ,上式中的形状参数和尺度参数的关系为:
[0137][0138]
g(
·
)为gamma函数。仿真中采取k=1.8,u=1.956。
[0139]
pm海洋功率谱为:
[0140][0141]
k=(k
x
,ky)是具有x和y分量为k
x
和ky的空间波数向量且s是固有的均方根高度;是相关长度;为了解释各向异性效应,取是沿着φw的相关长度;是沿着逆风方向的相关长度(φw=0
°
);是侧风方向的相关长度(φw=90
°
)。
[0142]
本发明考虑各向同性的情况。l波段的介电常数取50-j20。l
x
×
ly的海面大小为120λ
×
120λ。通过采用每波长18个点的采样密度,得到了代表海面的总共4665600个网格点。
[0143]
对于k分布振幅a,其l视的概率密度函数(pdf)为:
[0144][0145]
其中k
n-l
(
·
)是修正的贝塞尔阶函数。图3显示了从四个随机选择海面单视复图像的振幅图像。明亮的像素为较强的散射体。
[0146]
如图4所示的舰船的cad模型,尺寸为154m x 21.9m x 32.5m(长、宽、高)。总共生成了390984个三角形面片,并以3ds格式存储,用于计算合成孔径雷达在合成孔径时间内移动时的散射场。在计算后向散射场时,本发明考虑多次散射,以保留极化信息,同时考虑相干场和非相干场。为了便于仿真,本发明选择了1.27ghz(l波段)作为入射角为72
°
时的雷达载频。本发明的表面尺寸和相关参数都是波长。表1列出了主要的sar仿真参数,包括中心频率、信号带宽、采样率、脉冲宽度、脉冲重复频率。构成平台飞行轨迹的状态向量数据取自特
定区域上的alos-2样本。通过将4个方位角样本平均化到一个1x1 m2分辨率的单元中。
[0147][0148][0149]
表1系统参数
[0150]
图5显示了hh极化下海面上舰船的模拟图像样本,显示了舰船相对于sar移动方向的三个航向,从上到下:0
°
、45
°
和90
°
。图中只显示了舰船的部分图像。在hh极化时,从海面返回的信号较低,增强了舰船的散射强度。
[0151]
如图6至图9示意性表示根据本发明一种实施方式的海面舰船模拟的全极化sar图像的pauli分解(包括舰船、海面、海面与舰船的sar图像)。图6显示了在没有舰船的情况下,表面散射主导了总收益。图像中的稀疏分布是由体积散射产生的,呈绿色(图中a表示)。粗糙表面产生的这些体散射可归因于海表面高度的指数分布,尤其是在较小的俯角下(本研究中约为28o)。当舰船呈现如图7至图9所示,雷达从左向右看时,船体左侧有一个亮红色(图中c表示)圆点,如图7中a处所示,散射特征偏向双弹跳。在桥梁区域,特征增强为橙色(图中b表示),略带绿色(图中a表示),揭示了双重反弹和体积散射混合的散射机制,并偏向于体散射。在船体的右侧,有几个强散射点,对应于悬臂的位置。此外,在船体中部,三个特
征突出,明显由三个集装箱区域的边界形成。这些图像显示了目标的不同极化响应。从图7可以看出,交叉极化(hv和vh)从海面和舰船的回波较弱,而同极化具有更强的后向散射回波。从hh和vv偏振图像中,大量尖锐明亮的散射点来自舰船端对端放置的集装箱,集装箱之间有大量边界。由于雷达的入射方向和容器的方位形成了一个非常规则的方向,所以所有散射点都落在左上角的二面体散射体区域中,物理结构和图像特征相对应。表面粗糙度对极化的响应也很明显。由于散射机制对目标雷达几何结构敏感,目标相对于雷达观察方向的方向呈现出截然不同的图像特征。如图8所示,在三个航向中,船海相互作用似乎最强。前边缘呈淡黄色(图中d表示),表明除了表面散射和双反弹散射外,体散射大大增强。需要特别注意的是,当船舶航向与方位角成90
°
时,总回波几乎来自双反弹散射(图9)。sar接收到的后向散射信号几乎无法捕捉到船海相互作用的贡献。
[0152]
应当理解的是,图6至图9为仿真实验中的图,图中具有颜色的部分不仅限于标注位置。
[0153]
本发明中设备,包括存储介质和处理器,存储介质存储有计算机程序,计算机程序被处理器执行时实现海面舰船目标sar成像仿真方法。
[0154]
综上所述,本发明提出了一个电大目标和复合目标的相干sar图像模拟。特别是,在sar成像的背景下计算后向散射场。计算算法是通过数值aiem计算入射波引起的表面场。在计算二阶再辐射场时,通过采用了射弹射线sbr技术来提高传播路径跟踪效率。利用几何绕射理论gtd计算了合成孔径雷达sar在合成孔径中收集到的来自边缘和楔形物的绕射场,这些绕射场构成了合成孔径雷达收集到的总散射场。当sar沿方位方向移动时,当天线波束穿过目标时,会重复进行后向散射信号计算。在计算雷达信号发射和接收时,还考虑了孔径合成过程中天线增益和斜视角的变化。然后模拟全极化数据,通过分解研究散射分量。仿真结果表明,在复杂和大面积sar成像场景中,该方法在简化从后向散射场到复杂单视图像的数据流方面是一致的、全极化的。
[0155]
以上所述仅为本发明的一个实施方式而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包括在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1