未标定视频卫星进行深空目标观测的姿态凝视控制方法
1.本发明涉及航天器姿态控制技术领域,尤其涉及一种未标定视频卫星进行深空目标观测的姿态凝视控制方法。
背景技术:
2.在天文观测等场景中对深空目标观测时需要对目标进行稳定持续的高精度凝视。视频卫星因其能够对观测目标实现连续的跟踪并且获取视频信息,使得它在持续目标跟踪场合有着得天独厚的优势,因而具有广阔的应用前景。目前发展的在轨视频卫星有诸如国内的吉林1号、天拓2号以及国外的lapan-tubsat等。利用视频卫星实现深空目标凝视跟踪通常可分为基于位置信息和图像信息的跟踪控制两种方法。
3.传统的基于目标位置信息的凝视控制,首先根据目标先验位置信息设计出稳定凝视时卫星的期望姿态,然后通过pd控制等方式实现姿态的机动和跟踪。然而,当目标位置信息未知情况下,基于给定目标位置的传统凝视控制方法并不适用。
4.基于相机图像的凝视控制方法不需要目标的位置信息,利用现代图像识别技术提取出观测目标在像平面中像素坐标,然后利用该像素坐标与期望坐标之间的误差进行反馈控制卫星。由于目标在惯性空间中的位置速度并不可知,控制器若要根据目标成像的像素坐标将其控制到期望的图像中的位置,一般需要根据相机的内外参数,将像素偏差转换为当前姿态与期望姿态之差,然后设计合适的控制律使得姿态误差收敛,最后间接实现将目标成像移动到像平面中期望的位置。但是该方法需要依赖准确的相机参数才能实现有效跟踪控制。然而,卫星相机参数在长期的在轨运行过程中不可避免会发生变化,在轨标定相机内外参数十分困难。
5.基于未标定相机进行视觉伺服控制在机器人、无人机等领域有许多的研究工作,但目前尚未有针对未标定的视频卫星跟踪控制的相关研究报道。因此,相机参数未标定的视频卫星在深空目标位置信息未知条件下执行观测任务时的高精度姿态凝视控制仍然是面临的一个棘手的技术问题。
技术实现要素:
6.本发明要解决的技术问题就在于:针对现有技术存在的技术问题,本发明提供一种未标定视频卫星进行深空目标观测的姿态凝视控制方法。
7.为解决上述技术问题,本发明提出的技术方案为:
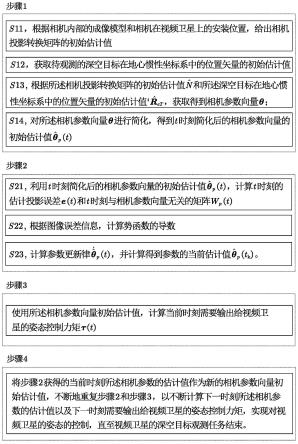
8.步骤1,根据相机内部的成像模型以及相机在视频卫星上的安装位置,确定需要进行估计的相机参数向量初始估计值;
9.步骤2,根据图像中识别到的目标的像素坐标信息以及所述相机参数向量初始估计值,利用预设的参数更新律求出当前时刻相机参数的估计值;
10.步骤3,根据所述相机参数向量初始估计值,计算当前时刻需要输出给视频卫星的姿态控制力矩以对视频卫星的姿态进行控制;
11.步骤4,将步骤2获得的当前时刻所述相机参数的估计值作为新的相机参数向量初始估计值,不断地重复步骤2和步骤3,以不断计算下一时刻所述相机参数的估计值以及下一时刻需要输出给视频卫星的姿态控制力矩,实现对视频卫星的姿态的控制,直至视频卫星的深空目标观测任务结束。
12.进一步的,所述步骤1包括步骤11~14:
13.步骤11,根据相机内部的成像模型和相机在视频卫星上的安装位置,给出相机投影转换矩阵的初始估计值;
14.所述相机投影转换矩阵为一个3
×
4维的矩阵,表达式为:
[0015][0016]
式中,n为所述相机投影转换矩阵,f为相机焦距,u0和v0分别为镜头中心光轴与像平面相交形成的像平面中心的横坐标和纵坐标,dx和dy分别为单个像素的物理长度和物理宽度;表示由卫星本体坐标系到相机坐标系的转换矩阵;cr
bc
表示相机在卫星本体坐标系中的安装位置矢量在相机坐标系中的分量;01×3表示1行3列的全零行向量;
[0017]
所述相机投影转换矩阵的初始估计值通过将理想状况下的物理参数f、u0、v0、dx、dy、和cr
bc
的值代入到所述相机投影转换矩阵的表达式中得到;
[0018]
步骤12,获取待观测的深空目标在地心惯性坐标系中的位置矢量的初始估计值;
[0019]
所述深空目标在地心惯性坐标系中的位置矢量记为
iret
;所述深空目标在地心惯性坐标系中的位置矢量的初始估计值记为
[0020]
步骤13,根据所述相机投影转换矩阵的初始估计值和所述深空目标在地心惯性坐标系中的位置矢量的初始估计值获取得到相机参数向量θ;
[0021]
所述相机参数向量θ定义为:
[0022]
θ=(n
ij
x
k n
14 n
24 n
34
)
t i,j,k=1,2,3
[0023]
式中,n
ij
表示相机投影转换矩阵n的第i行、第j列元素,其中,i=1、2、3,j=1、2、3,例如,n
11
为相机投影转换矩阵n的第1行、第1列元素,n
31
为相机投影转换矩阵n的第3行、第1列元素,n
33
为相机投影转换矩阵n的第3行、第3列元素;xk表示深空目标在地心惯性坐标系中的位置矢量
iret
的第k个分量,其中,k=1,2,3,例如,x1表示
iret
的第1个分量,x2表示
iret
的第2个分量,x3表示
iret
的第3个分量;n
14
为相机投影转换矩阵n的第1行、第4列元素,n
24
为相机投影转换矩阵n的第2行、第4列元素,n
34
为相机投影转换矩阵n的第3行、第4列元素;上标t表示向量的转置;
[0024]
步骤14,对所述相机参数向量θ进行简化,得到t时刻简化后的相机参数向量的初始估计值
[0025]
所述对所述相机参数向量θ进行简化包括:将所述相机参数向量θ中的元素n
33
x3固定设置为1,得到简化后的相机参数向量θ
p
为:
[0026]
θ
p
=(n
ij
x
k n
31
x
1 n
31
x
2 n
31
x
3 n
32
x
1 n
32
x
2 n
32
x
3 n
33
x
1 n
33
x
2 n
14 n
24 n
34
)
t
[0027]
i=1,2 j,k=1,2,3
[0028]
式中,θ
p
表示简化后的相机参数向量,n
ij
表示相机投影转换矩阵n的第i行、第j列
元素;xk表示深空目标在地心惯性坐标系中的位置矢量
iret
的第k个分量;
[0029]
所述t时刻简化后的相机参数向量的初始估计值为需要进行估计的相机参数向量初始估计值,通过将相机投影转换矩阵的初始估计值和深空目标在地心惯性坐标系中的位置矢量的初始估计值代入到θ
p
的表达式得到。
[0030]
可选的,所述步骤12中,相机内部的成像模型采用针孔成像模型。
[0031]
可选的,所述步骤12中,深空目标在地心惯性坐标系中的位置矢量的初始估计值通过先验知识信息或融合已知信息估算得到。
[0032]
进一步的,所述步骤2包括步骤21~23:
[0033]
步骤21:利用t时刻简化后的相机参数向量的初始估计值计算t时刻的估计投影误差e(t)和t时刻与相机参数向量无关的矩阵w
p
(t);
[0034]
所述t时刻的估计投影误差e(t)的表达式为:
[0035][0036]
式中,为t时刻目标在相机坐标系z轴上的分量的初始估计值;y(t)=(u,v)
t
为深空目标t在像平面的实际成像坐标,其中u、v分别为在像平面横、纵两轴上的坐标分量,由实际图像提取得到像平面上的目标成像坐标;为投影转换矩阵初始估计值的前两行元素组成的矩阵;th为自定义矩阵,其中,为地心惯性坐标系到卫星本体坐标系的转换矩阵,
ireb
为卫星在地心惯性坐标系中的位置;为深空目标在地心惯性坐标系中的位置矢量的初始估计值;
[0037]
所述t时刻与相机参数向量无关的矩阵w
p
(t)通过下述方程求解得到:
[0038]wp
(t)δθ
p
(t)=e(t)
[0039]
式中,表示参数估计误差,其中,为t时刻简化后的相机参数向量的初始估计值,θ
p
为t时刻简化后的相机参数向量;
[0040]
步骤22:根据图像误差信息,计算势函数的导数
[0041]
记图像跟踪误差δy(t)为:
[0042]
δy(t)=y(t)-yd[0043]
其中yd为期望的目标在图像中的坐标位置;y(t)为t时刻深空目标t在图像中的实际成像坐标位置;
[0044]
定义如下两个矩阵:
[0045][0046]
其中,p
(3)
为p的前三列元素组成的矩阵,而p为投影转换矩阵n的前两行元素组成的矩阵;为的前三列元素组成的向量,而为投影转换矩阵n的第三行元素组成的行向量;为由地心惯性坐标系到卫星本体坐标系的转换矩阵;
iret
为深空目标在地心惯性坐标系中的位置矢量;sk为自定义的运算符,对任意一个由元素q1、q2、q3组成的三维向量q,
sk定义的运算为
[0047]
再进一步定义矩阵g(t):
[0048][0049]
其中,和分别表示将其中参数用初始估计值代入矩阵和后得到的矩阵,δy
t
(t)表示图像跟踪误差的转置;
[0050]
得到所述势函数的导数的表达式为:
[0051][0052]
式中,为以参数估计值为自变量的势函数,为t时刻简化后的相机参数向量的初始估计值;a为正常数,b为非常小的正常数;e表示自然指数函数;符号表示偏导数;
[0053]
步骤23:计算参数更新律并计算得到参数的当前估计值
[0054]
根据下式计算矩阵y
p
(t):
[0055][0056]
其中,b为正定对角系数矩阵;
[0057]
按照下式计算当前时刻相机参数向量估计值的导数并作为参数更新律:
[0058][0059]
其中γ、k1和k2为合适取值的正定对角系数矩阵,w(t)为通过卫星姿态传感器测得的卫星的姿态角速度;e(t)为估计投影误差,为子步骤s5中自定义的与参数无关的矩阵w
p
(t)的转置,为势函数的导数;
[0060]
采用下式求得更新后的相机参数的估计值:
[0061][0062]
其中,t
k-1
表示上一时刻,tk表示当前时刻,表示t时刻简化后的相机参数向量的初始估计值,表示当前时刻简化后的相机参数的估计值,表示当前时刻相机参数向量估计值的导数;计算得到的将用作下个控制循环时步骤21中的相机参数向量初始估计值。
[0063]
进一步的,所述步骤3包括:使用所述相机参数向量初始估计值,计算当前时刻需要输出给视频卫星的姿态控制力矩τ(t);
[0064]
所述姿态控制力矩τ(t)的计算公式为:
[0065][0066]
式中,ω(t)为通过卫星姿态传感器测得的卫星的姿态角速度,j为卫星的惯量矩阵,阵,分别为矩阵和的初始估计值的转置;δy(t)为图像跟踪误差,表示势函数导数的绝对值;b、k3、k4均为适当取值的正定对角系数矩阵。
[0067]
一种存储有计算机程序的计算机可读存储介质,所述计算机程序执行时实现如上述的方法。
[0068]
与现有技术相比,本发明的优点在于:
[0069]
1、本发明未标定视频卫星进行深空目标观测的姿态凝视控制方法,能够在目标位置未知且相机参数存在偏差的情况下,使视频卫星有效地对深空目标进行凝视观测,且凝视观测的精度高,即可以使得即使卫星搭载的相机参数在未标定的情况下,仍然能够实现对深空目标的高精度凝视观测;
[0070]
2、本发明未标定视频卫星进行深空目标观测的姿态凝视控制方法,能够对相机参数和目标位置进行在线估计,通过实时地更新参数实现对控制力矩的自适应调整,最终可以使得目标在像平面的成像能控制到期望位置。
附图说明
[0071]
图1是本实施例未标定视频卫星进行深空目标观测的姿态凝视控制方法的实现流程示意图。
[0072]
图2是相机坐标系o
c-xcyczc及相机投影映射模型示意图。
[0073]
图3是估计投影误差e(t)的变化曲线图。
[0074]
图4是成像跟踪误差δy(t)的变化曲线图。
[0075]
图5是深空目标在图像中的成像轨迹图。
具体实施方式
[0076]
以下结合说明书附图和具体优选的实施例对本发明作进一步描述,但并不因此而限制本发明的保护范围。
[0077]
为清晰起见,本发明说明书中所采用符号的物理含义如下表1所示。
[0078]
表1符号及其含义
[0079]
[0080][0081]
本发明说明书中涉及的坐标系如下:
[0082]
相机坐标系——以相机的镜头中心作为原点,xc轴和yc轴与图像边界平行,zc轴为相机光轴所组成的右手直角坐标系;
[0083]
地心惯性坐标系——j2000坐标系,即原点在地球质心,xy平面为j2000时刻的地球平赤道面,x轴指向j2000时刻的平春分点(j2000时刻平赤道面与平黄道面的一个交点)所形成的右手直角坐标系;
[0084]
卫星本体坐标系——以卫星质心为原点,以三个惯量主轴分别作为三个方向坐标轴的右手直角坐标系;
[0085]
(一)流程描述
[0086]
本发明针对深空目标位置信息未知条件下的观测任务,给出一种未标定视频卫星对深空目标进行观测的姿态凝视控制方法,该方法是一种基于参数未标定相机获得的图像反馈信息的自适应姿态控制方法。
[0087]
如图1所示的流程,本实施例未标定视频卫星进行深空目标观测的姿态凝视控制方法包括步骤1~步骤4四个步骤:
[0088]
步骤1,根据相机内部的成像模型以及相机在视频卫星上的安装位置,确定需要进行估计的相机参数向量初始估计值;
[0089]
首先根据针孔成像模型,目标在像平面的成像过程可以通过相机投影转换矩阵n表示,并给出此矩阵的初始估计值;然后给出深空目标在地心惯性坐标系中的位置矢量
iret
的初始估计值;最后由相机投影转换矩阵n和位置矢量
iret
的值整理成t时刻简化后的相机参数向量θ
p
(t)。
[0090]
步骤2,根据图像中识别到的目标的像素坐标信息以及所述相机参数向量初始估计值,利用预设的参数更新律求出当前时刻相机参数的估计值;
[0091]
步骤2主要是对当前时刻t的相机参数进行循环估计。首先根据当前的时刻确定参数向量的初始估计值,然后计算估计投影误差e(t)以及矩阵w
p
(t);再然后跟据参数初始估计值计算所设计的势函数的导数,用于避免奇异性问题;最后将上述信息代入到参数更新律中,计算当前时刻的参数的当前估计值,并将其作为下一时刻此步骤的初始估计值。
[0092]
步骤3,根据所述相机参数向量初始估计值,计算当前时刻需要输出给视频卫星的姿态控制力矩以对视频卫星的姿态进行控制;
[0093]
将参数初始估计值代入到自适应姿态控制器τ(t)中,得到当前时刻t需要输出给视频卫星的姿态控制力矩,实现对目标的凝视观测。
[0094]
步骤4,将步骤2获得的当前时刻所述相机参数的估计值作为新的相机参数向量初始估计值,不断地重复步骤2和步骤3,以不断计算下一时刻所述相机参数的估计值以及下一时刻需要输出给视频卫星的姿态控制力矩,实现对视频卫星的姿态的控制,直至视频卫星的深空目标观测任务结束。
[0095]
(二)具体流程
[0096]
具体地,本发明所述姿态凝视控制方法的具体实施过程又可以细分为多个详细步骤,其中步骤11~14为步骤1包含的详细步骤,步骤21~23为步骤2包含的详细步骤。
[0097]
步骤1具体包括步骤11~14:
[0098]
步骤11,根据相机内部的成像模型和相机在视频卫星上的安装位置,给出相机投影转换矩阵的初始估计值;
[0099]
相机内部模型描述的是目标入射光线与像平面上的坐标之间的关系。本实施例中,相机的投影映射模型采用图2所示的最常用的针孔成像模型,即入射光线穿过镜头中心到达镜头后方的传感器,然后传感器将光信号转换为电信号最后成为数字图像信息。
[0100]
设f为相机焦距,镜头中心光轴与像平面的交点为像平面中心(u0,v0)。传感器由众多像素组成,假设像素的物理尺寸为dx
×
dy。自定义矩阵:
[0101][0102]
相机在卫星本体坐标系中的安装位置矢量由r
bc
表示,其在相机坐标系中的分量表示为cr
bc
。假设由卫星本体坐标系到相机坐标系的旋转矩阵为则定义矩阵t
bc
:
[0103]
[0104]
相机投影转换矩阵n定义为
[0105][0106]
式中,n为所述相机投影转换矩阵,f为相机焦距,u0和v0分别为镜头中心光轴与像平面相交形成的像平面中心的横坐标和纵坐标,dx和dy分别为单个像素的物理长度和物理宽度;表示由卫星本体坐标系到相机坐标系的转换矩阵;cr
bc
表示相机在卫星本体坐标系中的安装位置矢量在相机坐标系中的分量;01×3表示1行3列的全零行向量;
[0107]
将理想状况下的物理参数(包括f、u0、v0、dx、dy、和cr
bc
)的值代入到投影转换矩阵n的表达式中,得到的即为n的初始估计值注:此处符号顶标“^”表示对应参数的估计值。
[0108]
步骤12,获取待观测的深空目标在地心惯性坐标系中的位置矢量的初始估计值;
[0109]
所述深空目标在地心惯性坐标系中的位置矢量记为
iret
;所述深空目标在地心惯性坐标系中的位置矢量的初始估计值记为
[0110]
深空目标的位置主要通过先验知识信息得到,例如已经知道观测的目标是哪一颗恒星,可以通过查找相关资料知道其位置矢量,也可融合图像与卫星姿态等信息估算大致的目标位置。将先验知识信息或估算的信息作为深空目标位置
iret
的初始估计值
[0111]
步骤13,根据所述相机投影转换矩阵的初始估计值和所述深空目标在地心惯性坐标系中的位置矢量的初始估计值获取得到相机参数向量θ;
[0112]
投影转换矩阵n维数为3
×
4,其分量表示为n
ij
,i=1,2,3j=1,2,3,4;
iret
的第k个分量为xk,k=1,2,3。需要估计的参数向量定义为
[0113]
θ=(n
ij
x
k n
14 n
24 n
34
)
t i,j,k=1,2,3
[0114]
式中,n
ij
表示相机投影转换矩阵n的第i行、第j列元素,其中,i=1、2、3,j=1、2、3,例如,n
11
为相机投影转换矩阵n的第1行、第1列元素,n
31
为相机投影转换矩阵n的第3行、第1列元素,n
33
为相机投影转换矩阵n的第3行、第3列元素;xk表示深空目标在地心惯性坐标系中的位置矢量
iret
的第k个分量,其中,k=1,2,3,例如,x1表示
iret
的第1个分量,x2表示
iret
的第2个分量,x3表示
iret
的第3个分量;n
14
为相机投影转换矩阵n的第1行、第4列元素,n
24
为相机投影转换矩阵n的第2行、第4列元素,n
34
为相机投影转换矩阵n的第3行、第4列元素;上标t表示向量的转置;
[0115]
将s1和s2给出的估计值代入到上式得到θ的初始估计值。
[0116]
步骤14,对所述相机参数向量θ进行简化,得到t时刻简化后的相机参数向量的初始估计值
[0117]
理论上可知θ取值并不固定,其任意倍数向量(例如λθ,λ为非零常实数)对相机的投影模型均无影响,所以可减少参数数量。
[0118]
所述对所述相机参数向量θ进行简化包括:将所述相机参数向量θ中的元素n
33
x3固定设置为1,得到简化后的相机参数向量θ
p
为:
[0119]
θ
p
=(n
ij
x
k n
31
x
1 n
31
x
2 n
31
x
3 n
32
x
1 n
32
x
2 n
32
x
3 n
33
x
1 n
33
x
2 n
14 n
24 n
34
)
t
[0120]
i=1,2j,k=1,2,3
[0121]
式中,θ
p
表示简化后的相机参数向量,n
ij
表示相机投影转换矩阵n的第i行、第j列元素;xk表示深空目标在地心惯性坐标系中的位置矢量
iret
的第k个分量;
[0122]
所述t时刻简化后的相机参数向量的初始估计值为需要进行估计的相机参数向量初始估计值,通过将相机投影转换矩阵的初始估计值和深空目标在地心惯性坐标系中的位置矢量的初始估计值代入到θ
p
的表达式得到。
[0123]
步骤2包括步骤21~23:
[0124]
步骤21:利用t时刻简化后的相机参数向量的初始估计值计算t时刻的估计投影误差e(t)和t时刻与相机参数向量无关的矩阵w
p
(t);
[0125]
若当前时刻为初始时刻,则采用步骤1中s4得到的参数初始估计值,若当前时刻不是初始时刻,则将上一时刻的步骤s7中得到的参数当前估计值作为此步骤的参数初始估计值。
[0126]
估计投影误差e(t)用于衡量当前时刻估计的参数求出的估计目标图像的像素坐标与实际图像中像素坐标之间的差异。其按下式求出:
[0127][0128]
其中,深空目标t在像平面的实际成像坐标为y(t)=(u,v)
t
,而u、v分别为在像平面横、纵两轴上的坐标分量,由实际图像提取得到像平面上的目标成像坐标;为t时刻目标在相机坐标系zc轴上的分量的初始估计值;为投影转换矩阵初始估计值的前两行元素组成的矩阵;行元素组成的矩阵;为地心惯性坐标系到卫星本体坐标系的转换矩阵,
ireb
为卫星在地心惯性坐标系中的位置;为目标位置的初始估计值。估计投影误差e(t)是与参数线性相关的。
[0129]
定义参数估计误差θ
p
为参数的实际值,则估计投影误差e(t)还可表示为
[0130]
e(t)=w
p
(t)δθ
p
(t)
[0131]
矩阵w
p
(t)按上式求解得到。
[0132]
步骤22:根据图像误差信息,计算势函数的导数
[0133]
求得图像跟踪误差δy(t):
[0134]
δy(t)=y(t)-yd[0135]
其中yd为我们期望的目标在图像中的位置;通常我们期望目标能够位于图像中心,以获得更好的观测效果。有如下两个矩阵:
[0136][0137]
将矩阵和中参数用初始估计值代入计算,得到的结果记为和
[0138]
再计算如下自定义矩阵的值:
[0139][0140]
为了稳定性要求,需设计势函数以保证参数更新过程中上述矩阵g(t)的秩为2。所设计的势函数的导数为:
[0141][0142]
其中a为正常数,b为非常小的正常数。通过上式即求得势函数的导数。
[0143]
步骤23:计算参数更新律并计算得到参数的当前估计值
[0144]
首先需要根据下式计算一个矩阵y
p
(t):
[0145][0146]
其中b为正定对角系数矩阵。再根据前述步骤求得的数据,计算当前时刻参数更新所需的变化率:
[0147][0148]
其中γ、k1和k2为合适取值的正定对角系数矩阵,w(t)为通过卫星姿态传感器测得的卫星的姿态角速度。上式计算出后,可求得更新过后的参数估计值:
[0149][0150]
其中,t
k-1
表示前一时刻的时间,tk表示当前时刻,表示简化后的相机参数向量初始估计值,表示简化后的参数此时的当前估计值。在下一个控制循环中,将当前时刻的参数估计值作为到s5步骤中的,经过s5、s6、s7重新计算新的时刻参数当前估计值。
[0151]
步骤3的具体过程为:
[0152]
使用所述相机参数向量初始估计值,计算当前时刻需要输出给视频卫星的姿态控制力矩τ(t);
[0153]
通过下式计算控制力矩:
[0154][0155]
k3、k4均为适当取值的正定对角系数矩阵,其它变量在前述步骤中均已求得。将参数的初始估计值代入到上式中得到需要输出的力矩τ(t)。最终通过卫星上的反作用飞轮等姿态执行器输出对应力矩实现对卫星的控制,最终目标在相机图像中的成像会保持在期望的坐标位置yd。
[0156]
以上是本发明所述方法的具体流程。本发明为基于未标定视频卫星的姿态控制方法,通过对相机参数的不断估计,可以对深空目标实现自适应凝视控制,使得目标的在图像中的成像保持在期望的位置。
[0157]
(三)仿真分析
[0158]
下面根据该方法进行仿真,并给出仿真结果。
[0159]
本实施例仿真中假设目标初始状态已经处于视野中,然后利用本发明给出的姿态
凝视控制方法将目标控制到期望位置。相机参数如表2所示,其中m
321
(
·
)表示按照3-2-1转序转动对应角度的旋转矩阵。相机参数的理论值表示仿真中设置的理论相机模型参数,实际值是表示各种因素产生偏差后相机实际的参数,用于仿真中计算观测到的目标在像平面中的目标y(t)。
[0160]
表2相机参数
[0161][0162]
表3为仿真时控制器中所用到的各个系数值,其中diag{
·
}表示将其中各个元素依次作为
[0163]
对角线上的元素,其他空置位置均为0的矩阵。
[0164]
表3控制参数
[0165][0166]
仿真以表2的相机参数理论值作为初始估计值,计算估计投影误差以及势函数的导数,然后结合表3中部分参数将初始估计值用于计算参数估计值的导数,从而对参数进行更新,得到当前时刻的参数估计值。将控制参数和相机参数估计值代入到控制器中,得到当前时刻的控制力矩并通过姿态控制执行机构输出,实现对卫星姿态的控制。以当前时刻的参数估计值作为下一个时刻的初始估计值,重复上述步骤计算下一个时刻的控制力矩。如此重复,完成对目标的凝视控制过程。
[0167]
图3给出了估计投影误差e(t)的变化曲线图,展示了随着参数的不断更新,估计投
影误差逐渐收敛,证明参数更新方法能够朝着正确的方向对参数进行估计。
[0168]
图4给出成像跟踪误差δy(t)曲线图,由图4可以看出,目标在像平面的成像坐标与我们期望的坐标位置在横纵两个方向之间的差异都逐渐收敛至0,即观测目标的成像逐渐移动到期望的坐标位置。
[0169]
图5给出了目标在图像中的成像轨迹,像平面是大小为752
×
582像素,观测目标为远距离天体,当识别到的目标出现在视场边缘时,自适应控制器开始介入并将目标位置控制到期望的视场中心位置(376,291)。图5更直观展示了目标在图像中的成像位置从起始点逐渐移动到我们期望的终止点(即图像中心)的过程,证明了控制方法成功实现对目标的凝视控制。
[0170]
上述仿真结果表明,控制器能够达到预期的控制目标,使得目标成像在期望的视场位置。目标位置未知且相机参数存在偏差的情况下,该自适应控制器能够有效地对深空目标进行凝视观测。
[0171]
上述只是本发明的较佳实施例,并非对本发明作任何形式上的限制。虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明。因此,凡是未脱离本发明技术方案的内容,依据本发明技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均应落在本发明技术方案保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1