一种基于异构麦克风阵列的声学成像仪的制作方法
1.本发明涉及声学成像技术领域,特别涉及一种基于异构麦克风阵列的声学成像仪。
背景技术:
2.声学成像仪是一种新型的声源定位设备,利用麦克风阵列波束成形技术获取空间中的声源分布数据,并且配合高清光学摄像头实时采集视频画面,将声源数据与视频数据融合,可以在屏幕上实时显示声源位置和强度。近年来,声学成像仪广泛应用于电力、化工、汽车等领域。例如,在电力输送线路中,局部放电会产生超声波,声学成像仪可以在较远的距离检测局部放电故障;在化工系统中,气体泄漏检测至关重要,目前主要采用喷涂肥皂水的方法来检漏,声学成像仪可以检测到气体泄漏时产生的声波能量,精准地显示泄漏位置。
3.传统的声学成像仪一般采用同构麦克风阵列,即阵列中所有麦克风的频率响应均相同。为了能尽量检测到频带更宽的声源信号,声学成像仪一般选用响应带宽很宽的mems超声麦克风,用数十或数百个相同的超声麦克风按照一定形状排布成阵列。然而,目前的声学成像仪存在两个缺点:一是响应频率不够高,某些场景下局部放电的信号频率可达100khz,而当前的声学成像仪受到麦克风带宽和数据采集速度的限制,响应频率往往小于50khz;二是灵敏度不够高,在检测微小气体泄漏时这一点尤为重要,灵敏度和信噪比限制了最小能检测到的泄漏速率。宽频率响应与高灵敏度在单个麦克风上一般是互相矛盾的,这是由麦克风的机械结构特性决定的。传统的麦克风工作在较为平坦的频率响应区域,带宽较宽,但是灵敏度较低;谐振式麦克风工作在谐振频率附近,带宽较窄,但在谐振频率点的灵敏度很高,可以达到低频时的数倍甚至数十倍。
4.因此,如何同时实现宽频带和高灵敏度的声波检测是当前声学成像技术的难点。基于传统mems麦克风阵列的声学成像仪的响应频率不够高且灵敏度较低,影响了声学成像仪对高频信号和微弱信号的检测。
技术实现要素:
5.本发明的目的在于提供一种基于异构麦克风阵列的声学成像仪,以克服现有技术中的不足。
6.为实现上述目的,本发明提供如下技术方案:本发明公开了一种基于异构麦克风阵列的声学成像仪,包括光学摄像头和麦克风阵列,所述麦克风阵列包括至少两组不同频率响应的麦克风子阵列,每个所述麦克风子阵列包括至少三个谐振式麦克风,所述光学摄像头位于所述麦克风阵列的几何中心。
7.作为优选的,所述麦克风子阵列以光学摄像头为中心,按照螺旋线形状排布,每个所述麦克风子阵列中的谐振式麦克风按照螺旋线排列。
8.作为优选的,不同所述麦克风子阵列中的谐振式麦克风频率响应曲线不同,同一个麦克风子阵列中的谐振式麦克风频率响应曲线相同。
9.作为优选的,不同所述麦克风子阵列间隔固定角度依次排列,形成360
°
的螺旋阵,所述固定角度为360
°
/m,其中m为麦克风子阵列组数。
10.作为优选的,所述至少两组不同频率响应的麦克风子阵列按照谐振频率从小到大的顺序,依次命名为第一麦克风子阵列、第二麦克风子阵列、
……
、第m麦克风子阵列,其谐振频率依次为f1、f2、
……
、fm,其带宽依次为d1、d2、
……
、dm,其中,第i麦克风子阵列的谐振频率fi和带宽di以及第i+1麦克风阵列的谐振频率f
i+1
和带宽d
i+1
需满足f
i+1-fi≤(di+d
i+1
)/2,其中i=1,2,
……
,m-1。
11.作为优选的,所述麦克风子阵列的带宽保持一致。
12.作为优选的,所述麦克风阵列接收到某个频率的声波信号时,不同麦克风子阵列对该信号的响应灵敏度不同,谐振频率最接近上述声波信号的频率的子阵列响应幅度最大。
13.作为优选的,所述声学成像仪在处理声波信号时,仅选取响应幅度最大的麦克风子阵列来计算声波强度。
14.作为优选的,所述声学成像仪在计算声源位置时,所有信噪比高于设计阈值的麦克风均参与计算,信噪比低于设计阈值的麦克风不参与计算。
15.本发明的有益效果:本发明提出的基于异构麦克风阵列的声学成像仪由多个子阵列组成,每个子阵列由多个谐振式麦克风组成,不同子阵列的频率响应不同,通过多个子阵列的组合可以使阵列整体获得很宽的响应带宽,弥补了单个谐振式麦克风带宽窄的缺点,实现宽频带的声波探测;同时谐振式麦克风工作在谐振频率附近,可以获得很高的灵敏度,使声学成像仪可以探测到微弱的声波信号。
附图说明
16.图1是本发明实施例的结构示意图;图2是谐振式麦克风和传统麦克风的频率响应示意图;图3是异构麦克风阵列各个子阵列的频率响应示意图;图4是异构麦克风阵列总体频率响应示意图;图5是相邻子阵列谐振频率相差过大的案例示意图;图6是麦克风子阵列带宽差异过大的案例示意图。
具体实施方式
17.为使本发明的目的、技术方案和优点更加清楚明了,下面通过附图及实施例,对本发明进行进一步详细说明。但是应该理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限制本发明的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
18.本发明实施例提供一种基于异构麦克风阵列的声学成像仪,所述声学成像仪由多组不同频率响应的麦克风子阵列和一个光学摄像头组成。具体地,整体的麦克风阵列由m个子阵列组成,每个子阵列由n个谐振式麦克风组成,其中m为大于或等于2的整数,n为大于或等于3的整数。每个子阵列分别记为第一麦克风子阵列第一麦克风子阵列、第二麦克风子阵列、
……
、第m麦克风子阵列。不同子阵列的麦克风频率响应曲线不同,同一个子阵列内的麦
克风频率响应曲线相同。m大于或等于2的原因为,若m等于1,则麦克风阵列为同构阵列,而不是本技术提出的异构阵列;n大于或等于3的原因为,子阵列的麦克风数量必须大于或等于3,才能在三维空间中实现3点定位,否则没有唯一解。
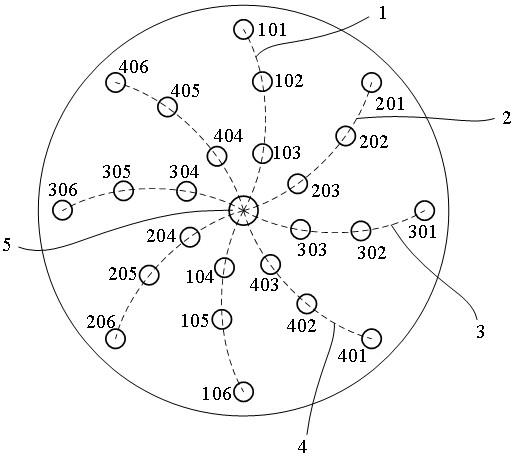
19.图1是根据一示例性实施例示出的一种基于异构麦克风阵列的声学成像仪的结构示意图,在图1示出的实施例中,m=4,n=6。具体地,图1中示出的声学成像仪由第一麦克风子阵列1、第二麦克风子阵列2、第三麦克风子阵列3、第四麦克风子阵列4、光学摄像头5组成。所述第一麦克风子阵列1包括多个谐振频率为f1的谐振式麦克风,具体地,图1中示出6个所述谐振式麦克风,标记为101、102、103、104、105、106。所述第二麦克风子阵列2包括多个谐振频率为f2的谐振式麦克风,具体地,图1中示出6个所述谐振式麦克风,标记为201、202、203、204、205、206。所述第三麦克风子阵列3包括多个谐振频率为f3的谐振式麦克风,具体地,图1中示出6个所述谐振式麦克风,标记为301、302、303、304、305、306。所述第四麦克风子阵列4包括多个谐振频率为f4的谐振式麦克风,具体地,图1中示出6个所述谐振式麦克风,标记为401、402、403、404、405、406。
20.图2是谐振式麦克风和传统麦克风的频率响应示意图。请参考图2,所述谐振式麦克风存在一个明显的谐振峰,谐振峰的频率为麦克风机械结构的固有谐振频率,谐振式麦克风仅能工作在其谐振频率f0附近较窄的频带,带宽为d0。在谐振系统中,带宽的定义为对输入信号的响应幅值大于或等于谐振峰值的0.707倍的频率范围宽度。具体地,在谐振式麦克风的频率响应曲线中,若谐振峰幅值为v
max
,频率响应幅值为0.707倍v
max
对应的频率有2个,分别为f
l
和fr,则带宽为f
r-f
l
。而目前声学成像仪中常用的传统麦克风工作在频率曲线中较为平坦的一段,其带宽一般定义为平坦区域的频率范围宽度,即带宽为dc。
21.虽然单个谐振式麦克风的带宽一般比传统麦克风的带宽更窄,但是谐振式麦克风在谐振频率附近的灵敏度比传统麦克风的灵敏度更高,其灵敏度可相差数倍甚至数十倍。因此,采用谐振式麦克风作为声学成像仪的基本单元,可以获得更高的声波探测灵敏度,尤其是在气体泄漏检测应用中,可以探测到更微小的泄漏点,防止漏检。然而,若只用同一种谐振式麦克风组成同构阵列,阵列的总体带宽与单个谐振式麦克风相等,无法满足声学成像仪对宽频带采集需求。因此本技术提出了一种异构麦克风阵列,由多组不同频率响应的麦克风子阵列组成,通过各麦克风子阵列频率响应曲线的互补,使异构阵列的总体带宽得到极大地扩展,对很宽频率范围内的声波信号均有较高的灵敏度。
22.每个子阵列中的麦克风按照螺旋线排列,不同子阵列间隔固定角度依次排列,形成360
°
的螺旋阵,所述固定角度为360
°
/m。图1示出了第一麦克风子阵列1、第二麦克风子阵列2、第三麦克风子阵列3、第四麦克风子阵列4按照螺旋线形状排布的阵型。相比于十字形阵列、圆形阵列、矩形阵列等,螺旋线形状排布的麦克风阵列可以避免重复空间采样,可有效抑制混叠效应,是声学成像仪中的主流阵型。
23.所述光学摄像头5位于麦克风阵列的几何中心,用于获取视频数据。所述视频数据与麦克风阵列获取的声源数据结合,可以在视频上实时显示声源位置和强度。所述光学摄像头位于麦克风阵列的几何中心,可以保持整体阵型的对称性,也便于光学中的空间位置与声源位置坐标的计算。
24.所述第一麦克风子阵列、第二麦克风子阵列、
……
、第m麦克风子阵列的谐振频率f1、f2、
……
、fm按照从小到大的顺序排列。第一麦克风子阵列第二麦克风子阵列第m麦克风
子阵列图3是根据一示例性实施例示出的异构麦克风阵列各个子阵列的频率响应示意图,其中m=4。请参考图3,所述第一麦克风子阵列1、第二麦克风子阵列2、第三麦克风子阵列3、第四麦克风子阵列4的谐振频率f1、f2、f3、f4按照从小到大的顺序排列,其带宽分别为d1、d2、d3、d4。
25.图4是根据一示例性实施例示出的异构麦克风阵列总体频率响应示意图。请参考图4,当本技术提出的异构麦克风阵列接收到某个频率的声波信号时,不同子阵列对该信号的响应灵敏度是不同的,谐振频率最接近该声波频率的子阵列响应幅度最大。本技术提出的声学成像仪在处理该频率的声波信号时,仅选取响应幅度最大的子阵列来计算声波强度。在计算声源位置时,所有信噪比高于设计阈值的麦克风都会参与计算,信噪比低于设计阈值的麦克风不参与计算,虽然这会损失一部分成像分辨率,但是由于信噪比高,可以保证声源定位的准确性,而且提升了声波探测极限。因此,虽然单个子阵列的带宽比较窄,但是整个异构阵列的总带宽可以覆盖很宽的频率范围。
26.在一个具体的实施例中,设定所述信噪比设计阈值为10,所有麦克风的噪声等效电压为vn,则信噪比高于设计阈值的条件为麦克风输出电压大于10vn。在实际测试中,对于某个特定的声波信号,发现第i、i+1、i+2麦克风子阵列的输出电压大于10vn(i为1,2,
……
,m-1中特定的一个值),其余麦克风子阵列的输出电压小于10vn,且第i+1麦克风子阵列的输出幅值最大。计算声波强度时,信噪比越高的数据,得到的结果越准确,因此仅采用输出最大的麦克风子阵列的数据即可。则以第i+1麦克风子阵列的输出数据计算声波的强度,计算公式为第i+1麦克风子阵列中所有麦克风的平均输出电压除以第i+1麦克风子阵列的灵敏度,由于谐振式麦克风的灵敏度与频率有关,先对麦克风的输出信号进行傅里叶变换,获得其中心频率,以中心频率处的灵敏度作为第i+1麦克风子阵列的灵敏度。因为声源定位的分辨率与麦克风阵列中有效阵元的数量有关,因此将所有信噪比高于设计阈值的麦克风数据都利用起来,而不是仅仅使用输出最大的麦克风子阵列的数据。则以第i、i+1、i+2麦克风子阵列的输出数据计算声源的空间位置,计算方法为将第i、i+1、i+2麦克风子阵列所有麦克风的输出电压信号进行波束成形分析,即可得到声源位置。
27.所述第i麦克风阵列的谐振频率fi和带宽di以及第i+1麦克风阵列的谐振频率f
i+1
和带宽d
i+1
需满足f
i+1-fi≤(di+d
i+1
)/2,其中i=1,2,
……
,m-1。
28.满足上述条件的异构阵列的总带宽可以达到d=f
m-f1+d1/2+dm/2。如图4所示,所述第一麦克风子阵列1、第二麦克风子阵列2、第三麦克风子阵列3、第四麦克风子阵列4构成的异构阵列的总带宽可以达到f
4-f1+d1/2+d4/2。具体地,若f1=20khz,f2=40khz,f3=60khz,f4=80khz,d1=d2=d3=d4=30khz,则异构阵列的总带宽可达90khz,覆盖频率范围5khz-95khz,可以满足绝大多数应用场景的需求。
29.若不满足上述条件,在某些特殊频率点处,系统的响应幅值会很小,导致声学成像仪对这些频率的声波不敏感,成像效果较差。图5示出了一种相邻子阵列谐振频率相差过大的案例。在图5中,第一麦克风子阵列的频率f1=20khz,第二麦克风子阵列的频率f2=60khz,第一麦克风子阵列和第二麦克风子阵列的带宽均为30khz,即d1=d2=30khz,这种情况不满足f
2-f1≤(d1+d2)/2,则在第一麦克风子阵列和第二麦克风子阵列的频率响应曲线交叉点附近会出现一个不敏感区域,不敏感区域的频率范围宽度为f
2-f
1-(d1+d2)/2=10khz。在不敏感区域的频率范围内,声学成像仪的所有麦克风子阵列对声波的响应灵敏度均较低,导致
声源位置和声源强度计算不准确。
30.相邻子阵列的谐振频率差值也不宜过小,否则需要大量的子阵列,才能填满目标带宽范围,这将增加系统硬件和软件算法的复杂度。满足条件f
i+1-fi≤(di+d
i+1
)/2 (其中i=1,2,
……
,m-1)的异构阵列的总带宽可以达到d=f
m-f1+d1/2+dm/2,若相邻子阵列的谐振频率差值均等于δf,麦克风的带宽均等于d0,则d=(m-1)
×
δf+d0,需要的麦克风子阵列数量为m=(d-d0)/δf+1。在一个具体的实施例中,目标带宽范围是5khz-95khz(即d=95khz-5khz=90khz),所有麦克风子阵列的带宽均为d0=30khz。若相邻子阵列的谐振频率差值为δf=20khz,则需要的麦克风子阵列数量为m=(90-30)/20+1=4,仅需4个麦克风子阵列即可覆盖目标范围;若相邻子阵列的谐振频率差值为δf=5khz,则需要的麦克风子阵列数量为m=(90-30)/5+1=13,需13个麦克风子阵列才可以覆盖目标范围。
31.所述第一麦克风子阵列、第二麦克风子阵列、
……
、第m麦克风子阵列的带宽需尽量保持一致,差异不宜过大,否则会导致带宽较小的子阵列在实际工作时发挥的作用较小。图6示出了一种麦克风子阵列带宽差异过大的案例。第一麦克风子阵列的带宽d1和第三麦克风子阵列的带宽d3均为30khz,第二麦克风子阵列的带宽d2为10khz,第二麦克风子阵列对异构阵列总带宽的贡献仅为10/(30+10+30)=1/7,第一麦克风子阵列和第三麦克子阵列对异构阵列总带宽的贡献均为30/(30+10+30)=3/7。可以看出,麦克子阵列对异构阵列总带宽的贡献与其带宽成正比。因此,为了使每个麦克风子阵列都能发挥较大的作用,其带宽需尽量保持一致。
32.本发明提出的基于异构麦克风阵列的声学成像仪由多个子阵列组成,每个子阵列由多个谐振式麦克风组成,不同子阵列的频率响应不同,通过多个子阵列的组合可以使阵列整体获得很宽的响应带宽,弥补了单个谐振式麦克风带宽窄的缺点,实现宽频带的声波探测;同时谐振式麦克风工作在谐振频率附近,可以获得很高的灵敏度,使声学成像仪可以探测到微弱的声波信号。
33.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换或改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1