一种激光雷达检测车辆过秤行为的检测方法与流程
1.本发明涉及点云数据分析技术领域,更具体地,涉及一种激光雷达检测车辆过秤行为的检测方法。
背景技术:
2.随着社会的不断发展,交通运输能力在政策及技术的双重驱动下也得以迅速提升。为了保证货物的快速流通,国省道以及高速公路的通车里程也在逐年攀升,车辆的整体运行速度也在不断提高。为了规范司机及车辆的安全行驶行为,车辆在进出高速公路收费站或经过重点道路区域时会通过过秤系统检测车辆的装载量、车辆外观以及车辆速度等,确保行驶过程中的车辆装载量均在核定装载范围内。
3.经过多年的技术积累在工厂、收费站以及道路定点位置设置车辆称重设备已成常态化。为了保证车辆称重行为顺利进行和处罚监管证据链完整,现有的过秤系统主要由车辆检测系统、车辆取证系统(摄像机)以及称重系统(称台)三部分组成。其中车辆检测系统是判断车辆称重行为是否合规的主要因素,也是影响过秤系统检测稳定的重要技术点。目前的车辆检测系统/技术主要为三种:环形线圈、地磁以及红外对射装置三种技术。通过连续部署2-3组检测装置,结合车辆进入及离开的顺序,检测车辆的行驶方向、车辆经过秤台的时间以及区分前后车辆的位置进行车辆分离等。
4.但是,现有的车辆检测技术在应用过程中存在一些不足,1.环形线圈:检测范围广(常见线圈尺寸为120cm*240cm),但是当车辆跟车较近时难以实现车辆分离功能;同一辆车在检测区域内倒车时系统无法正常判断;自由流场景下会存在两个车道互相干扰现象。2.地磁:灵敏度相对较高,检测过程中容易存在邻道车辆干扰;同一辆车在检测区域内倒车时系统无法正常判断,称重时的倒车行为会增加车辆轴数,从而逃避超载惩罚。3.视频检测技术:所获取的现场数据量相对扁平化,后端数据分析量大且易出现误识别;在雨雾夜等恶劣环境下系统容易受外界干扰。因此,为了更好的检测在称重系统中车辆行驶轨迹,本技术旨在提供一种激光雷达检测车辆过秤行为的检测方法,弥补现有技术中的不足。
技术实现要素:
5.本发明的目的在于,提供一种激光雷达检测车辆过秤行为的检测方法,准确的检测车辆的行驶方向、车辆轨迹、前后车辆分离,以及车辆过秤时是否有倒车行为,检测的准确性高。
6.一种激光雷达检测车辆过秤行为的检测方法,包括步骤:
7.s1,通过激光雷达采集路面的三维点云数据,将获得的三维点云数据切成若干帧的点云数据;
8.s2,分析连续多帧点云数据判断车辆的行驶方向、行驶速度和车辆轨迹,并且结合激光雷达的测距和测速功能判断车辆过秤时是否有倒车行为。
9.在一些实施方式中,在步骤s1中,所述激光雷达包括3d激光雷达、图像级激光雷
达,激光雷达安装在高速公路的龙门架上,激光雷达安装在龙门架的左侧或右侧,激光雷达能够扫描到车辆的车头或车尾、车顶和车身。
10.进一步的,所述激光雷达与车道线具有角度a,角度a为10
°‑
70
°
,车辆距离激光雷达有倾斜角度,对于每帧点云数据进行距离和速度的垂直校正,将倾斜角度测量的值,转换为车辆垂直于当前门架的速度和距离。
11.进一步的,一组激光雷达扫描2-3条车道的路面三维点云数据,若总车道≥4条,则安装多组激光雷达,多组激光雷达之间的安装关系以每组激光雷达各负责2-3条车行道为准,各组激光雷达间的探测的车道互相不覆盖。
12.在一些实施方式中,所述激光雷达以shz的扫描速度采集并输出扫描的三维点云数据,shz即每秒采集s/10帧画面,s为80-200;激光雷达获取整个路面的原始三维点云数据,所述三维点云数据包括:路面、车辆、行人、建筑物。
13.在一些实施方式中,所述将三维点云数据切成若干帧的点云数据的工具包括:opencv开源库、pcl开源库。
14.在一些实施方式中,在步骤s2中,通过对雷达点云数据的解析判断车辆的实时位置,分析连续多帧数据判断车辆的行驶方向和行驶速度,结合车辆方向判断车辆轨迹。
15.进一步的,将激光雷达安装位置坐标定义为三维坐标(0,0,0),车辆的实时位置和速度均以激光雷达为参照点进行计算,通过计算连续多帧点云中车辆与激光雷达的距离d,能够判断该车辆的行驶方向;通过计算连续多帧点云中车辆的瞬时速度的平均值,来计算车辆的行驶速度v。
16.进一步的,车辆距离激光雷达的距离d越来越小,则判断该车辆为来车方向;车辆距离激光雷达的距离d越来越大,则判断该车辆为去车方向。
17.进一步的,车辆的瞬时速度的计算方式为当前时刻和前一时刻的位置差与时间差的比值,车辆为去车方向时,瞬时速度为正值,车辆为来车方向时,瞬时速度为负值,计算瞬时速度的公式表示为:
[0018][0019]
其中,t
t
为当前帧的时间,t
t-1
为当前帧前一帧的时间,d
t
为当前帧的车辆位置,d
t-1
为当前帧前一帧的车辆位置。
[0020]
进一步的,根据雷达点云分布情况,判断特定区域内车辆运行状态车辆位置实现亚米级跟踪、车辆轮廓实现厘米级检测。
[0021]
在一些实施方式中,在步骤s2中,在车辆通过秤台的时间内,根据车辆的行驶方向、行驶速度和车辆轨迹,结合激光雷达具有测距和测速功能,判断车辆在动态称重秤台上是否发生倒车行为。
[0022]
进一步的,将车辆通过秤台的时间离散化,车辆通过秤台的时间数据集为t,对于t内的任意时刻t,都具有对应的车速v和雷达探测距离d;在t
stop
时刻,车辆速度v
stop
小于车辆临界停车速度阈值v
stop
′
,即车辆已经停车,此时行驶距离为d
stop
;经过一段时间后车辆继续行驶了m米距离,行驶到达m米距离时的时间为tm、行驶速度为vm、行驶距离为dm;其中,t
m-t
stop
》0,若d
m-d
stop
》0且v
stop
》0、或者d
m-d
stop
《0且v
stop
《0,则车辆没有发生倒车行为,若d
m-d
stop
》0且v
stop
《0、或者d
m-d
stop
《0且v
stop
》0,则车辆发生了倒车行为。
[0023]
进一步的,当d
m-d
stop
》0且v
stop
》0时,v
stop
》0表明车辆停车前沿去车方向行驶,d
m-d
stop
》0表明停车行驶m距离后,车辆位置dm距离停车位置d
stop
更远,车辆继续沿着去车方向行驶,没有发生倒车行为。
[0024]
进一步的,当d
m-d
stop
《0且v
stop
《0时,v
stop
《0表明车辆停车前沿来车方向行驶,d
m-d
stop
《0表明停车行驶m距离后,车辆位置dm距离停车位置d
stop
更近,车辆继续沿着来车方向行驶,没有发生倒车行为。
[0025]
进一步的,当d
m-d
stop
》0且v
stop
《0时,v
stop
《0表明车辆停车前沿来车方向行驶,d
m-d
stop
》0表明停车行驶m距离后,车辆位置dm距离停车位置d
stop
更远,车辆没有继续沿着来车方向行驶,发生了倒车行为。
[0026]
进一步的,当d
m-d
stop
《0且v
stop
》0时,v
stop
》0表明车辆停车前沿去车方向行驶,d
m-d
stop
《0表明停车行驶m距离后,车辆位置dm距离停车位置d
stop
更近,车辆没有继续沿着来车方向行驶,发生了倒车行为。
[0027]
在一些实施方式中,判断出车辆的行驶方向和行驶速度后,结合激光雷达多样性数据对相邻两辆车进行分离,相邻车辆包括同道同向、异道同向、异道异向,多样性数据包括:路面车道、路面车道线、车辆。
[0028]
在一些实施方式中,所述激光雷达将获取到的原始三维点云数据通过网络的形式传送到路侧端的工控机中,在该工控机中通过分析检测,输出结构化的目标数据,这些目标数据包括:路面、车辆、行人、建筑物。
[0029]
进一步的,若激光雷达有多个,一组激光雷达接入一路工控机。
[0030]
在一些实施方式中,通过分析激光雷达获取的三维点云数据,还能获得车辆的车型、车辆轴数,从而获得该车辆的额定载重。
附图说明
[0031]
结合以下附图一起阅读时,将会更加充分地描述本技术内容的上述和其他特征。可以理解,这些附图仅描绘了本技术内容的若干实施方式,因此不应认为是对本技术内容范围的限定。通过采用附图,本技术内容将会得到更加明确和详细地说明。
[0032]
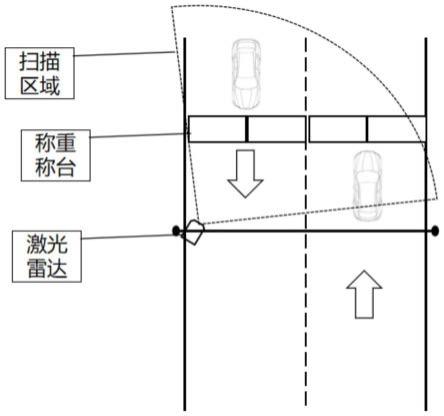
图1为本技术的激光雷达的一种安装位置示意图。
[0033]
图2为本技术的激光雷达计算去车方向无倒车行为的示意图。
[0034]
图3为本技术的激光雷达计算来车方向无倒车行为的示意图。
[0035]
图4为本技术的激光雷达计算来车方向有倒车行为的示意图。
[0036]
图5为本技术的激光雷达计算去车方向有倒车行为的示意图。
具体实施方式
[0037]
描述以下实施例以辅助对本技术的理解,实施例不是也不应当以任何方式解释为限制本技术的保护范围。
[0038]
在以下描述中,本领域的技术人员将认识到,在本论述的全文中,组件可描述为单独的功能单元(可包括子单元),但是本领域的技术人员将认识到,各种组件或其部分可划分成单独组件,或者可整合在一起(包括整合在单个的系统或组件内)。
[0039]
同时,组件或系统之间的连接并不旨在限于直接连接。相反,在这些组件之间的数
据可由中间组件修改、重格式化、或以其它方式改变。另外,可使用另外或更少的连接。还应注意,术语“联接”、“连接”、或“输入”“固定”应理解为包括直接连接、通过一个或多个中间媒介来进行的间接的连接或固定。
[0040]
实施例1:
[0041]
一种激光雷达检测车辆过秤行为的检测方法,包括步骤:s1,通过激光雷达采集路面的三维点云数据,将获得的三维点云数据切成若干帧的点云数据;s2,分析连续多帧点云数据判断车辆的行驶方向、行驶速度和车辆轨迹,并且结合激光雷达的测距和测速功能判断车辆过秤时是否有倒车行为。
[0042]
在步骤s1中,所述激光雷达为3d激光雷达,激光雷达安装在高速公路的龙门架上,激光雷达安装在龙门架的左侧,激光雷达能够扫描到车辆的车头或车尾、车顶和车身,如图1所示。所述激光雷达与车道线具有角度a,角度a为40
°
,车辆距离激光雷达有倾斜角度,对于每帧点云数据进行距离和速度的垂直校正,将倾斜角度测量的值,转换为车辆垂直于当前门架的速度和距离。一组激光雷达扫描2条车道的路面三维点云数据,若总车道≥4条,则安装多组激光雷达,多组激光雷达之间的安装关系以每组激光雷达各负责2条车行道为准,各组激光雷达间的探测的车道互相不覆盖。所述激光雷达以shz的扫描速度采集并输出扫描的三维点云数据,shz即每秒采集s/10帧画面,s为120;激光雷达获取整个路面的原始三维点云数据,所述三维点云数据包括:路面、车辆、行人、建筑物。所述将三维点云数据切成若干帧的点云数据的工具为opencv开源库。
[0043]
在步骤s2中,通过对雷达点云数据的解析判断车辆的实时位置,分析连续多帧数据判断车辆的行驶方向和行驶速度,结合车辆方向判断车辆轨迹。将激光雷达安装位置坐标定义为三维坐标(0,0,0),车辆的实时位置和速度均以激光雷达为参照点进行计算,通过计算连续多帧点云中车辆与激光雷达的距离d,能够判断该车辆的行驶方向;通过计算连续多帧点云中车辆的瞬时速度的平均值,来计算车辆的行驶速度v。车辆距离激光雷达的距离d越来越小,则判断该车辆为来车方向;车辆距离激光雷达的距离d越来越大,则判断该车辆为去车方向。车辆的瞬时速度的计算方式为当前时刻和前一时刻的位置差与时间差的比值,车辆为去车方向时,瞬时速度为正值,车辆为来车方向时,瞬时速度为负值,计算瞬时速度的公式表示为:
[0044][0045]
其中,t
t
为当前帧的时间,t
t-1
为当前帧前一帧的时间,d
t
为当前帧的车辆位置,d
t-1
为当前帧前一帧的车辆位置。根据雷达点云分布情况,判断特定区域内车辆运行状态车辆位置实现亚米级跟踪、车辆轮廓实现厘米级检测。
[0046]
在步骤s2中,在车辆通过秤台的时间内,根据车辆的行驶方向、行驶速度和车辆轨迹,结合激光雷达具有测距和测速功能,判断车辆在动态称重秤台上是否发生倒车行为。将车辆通过秤台的时间离散化,车辆通过秤台的时间数据集为t,对于t内的任意时刻t,都具有对应的车速v和雷达探测距离d;在t
stop
时刻,车辆速度v
stop
小于车辆临界停车速度阈值v
stop
′
,即车辆已经停车,此时行驶距离为d
stop
;经过一段时间后车辆继续行驶了m米距离,行驶到达m米距离时的时间为tm、行驶速度为vm、行驶距离为dm;其中,t
m-t
stop
》0,若d
m-d
stop
》0且v
stop
》0、或者d
m-d
stop
《0且v
stop
《0,则车辆没有发生倒车行为,若d
m-d
stop
》0且v
stop
《0、或者dm-d
stop
《0且v
stop
》0,则车辆发生了倒车行为。
[0047]
当d
m-d
stop
》0且v
stop
》0时,v
stop
》0表明车辆停车前沿去车方向行驶,d
m-d
stop
》0表明停车行驶m距离后,车辆位置dm距离停车位置d
stop
更远,车辆继续沿着去车方向行驶,没有发生倒车行为,如图2所示。当d
m-d
stop
《0且v
stop
《0时,v
stop
《0表明车辆停车前沿来车方向行驶,d
m-d
stop
《0表明停车行驶m距离后,车辆位置dm距离停车位置d
stop
更近,车辆继续沿着来车方向行驶,没有发生倒车行为,如图3所示。当d
m-d
stop
》0且v
stop
《0时,v
stop
《0表明车辆停车前沿来车方向行驶,d
m-d
stop
》0表明停车行驶m距离后,车辆位置dm距离停车位置d
stop
更远,车辆没有继续沿着来车方向行驶,发生了倒车行为,如图4所示。当d
m-d
stop
《0且v
stop
》0时,v
stop
》0表明车辆停车前沿去车方向行驶,d
m-d
stop
《0表明停车行驶m距离后,车辆位置dm距离停车位置d
stop
更近,车辆没有继续沿着来车方向行驶,发生了倒车行为,如图5所示。
[0048]
判断出车辆的行驶方向和行驶速度后,结合激光雷达多样性数据对相邻两辆车进行分离,相邻车辆包括同道同向、异道同向、异道异向,多样性数据包括:路面车道、路面车道线、车辆。所述激光雷达将获取到的原始三维点云数据通过网络的形式传送到路侧端的工控机中,在该工控机中通过分析检测,输出结构化的目标数据,这些目标数据包括:路面、车辆、行人、建筑物。若激光雷达有多个,一组激光雷达接入一路工控机。通过分析激光雷达获取的三维点云数据,还能获得车辆的车型、车辆轴数,从而获得该车辆的额定载重。
[0049]
尽管本技术已公开了多个方面和实施方式,但是其它方面和实施方式对本领域技术人员而言将是显而易见的,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。本技术公开的多个方面和实施方式仅用于举例说明,其并非旨在限制本技术,本技术的实际保护范围以权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1