一种基于光谱分层的浅海水深反演方法及系统
1.本发明涉及浅海水深反演方法领域,具体来说,涉及一种基于光谱分层的浅海水深反演方法及系统。
背景技术:
2.浅海水深数据是航行安全、工程建设、资源开发、海洋救护、生态保护等应用的基础保障。传统的船载声呐和机载激光测深方法可获取高精度浅海水深数据,但是成本昂贵,不适用于大规模、周期性测量。卫星遥感有不受地理空间约束、费用低等优势,很好地克服了传统方法的局限性,卫星遥感水深反演方法受到广泛关注。
3.stumpf比值(stumpf,2003)和lyzenga多项式算法(lyzenga,1978) 是两种经典的卫星遥感反演算法,应用十分广泛,目前已诞生了大量改进算法,这些改进算法可归纳为两类,一是非线性拟合改进,即从机器学习角度考虑,如将stumpf波段对数调节因子由1个增加到2个(田震,2015),将一次多项式模型提升为多次多项式模型(dierssen et al.,2003;s
á
nchezcarnero et al., 2014;li,2016;王燕红等,2018;张艳红等,2016),将线性拟合改进为支持向量机拟合(vojinovic et al.,2013;misra et al.,2018)等;二是地理自适应改进,即从地理学角度考虑,如顾及底质类型水深反演(党福星和丁谦, 2003)、水深分段反演(郭晓雷等,2017)、地理分区反演(su et al.,2013) 等。
4.但是,stumpf比值和lyzenga多项式等经典算法的改进主要从机器学习和地理学角度开展,没有重视光谱测深性能,如光谱的测深极限与适用区间,会影响水深反演精度。即不同光谱测深极限不同,对于清澈水体,蓝光 (440-540nm)最大穿透深度接近30m,绿光(500-600nm)到15m左右,红光(600-700nm)到5m左右(su,2008),但现有水深反演算法没有顾忌不同光谱测深特性差异,在不同水深处采用一套反演系数,如在红光可达的浅水区与红光不可达深水区,均赋予红光波段相同的反演系数或权重,会降低水深反演精度。
5.针对相关技术中的问题,目前尚未提出有效的解决方案。
技术实现要素:
6.针对相关技术中的问题,本发明提出一种基于光谱分层的浅海水深反演方法及系统,以克服现有相关技术所存在的上述技术问题。
7.为此,本发明采用的具体技术方案如下:
8.根据本发明的一个方面,提供了一种基于光谱分层的浅海水深反演方法,该方法包括以下步骤:
9.s1、基于计算机数字图像处理技术对预设的遥感影像数据集进行预处理;
10.s2、基于多光谱测深性能和影像分割的无参数光谱分层策略,获取遥感影像波段分量;
11.s3、通过获取的所述遥感影像波段分量建立基于光谱分层的浅海水深反演算法。
12.进一步的,所述基于计算机数字图像处理技术对遥感影像数据集进行预处理包括
以下步骤:
13.s11、利用sentinel-2影像推荐的snap插件对sentinel-2遥感影像进行大气校正;
14.s12、通过海图数据与研究区影像数据进行地理配准,并从所述海图数据上提取水深30m以深范围作为掩膜文件,对遥感影像进行掩膜处理并去除影像中的深水区域;
15.s13、利用3
×
3大小的窗口对掩膜后的遥感影像进行均值滤波。
16.进一步的,所述基于多光谱测深性能和影像分割的无参数光谱分层策略,获取遥感影像波段分量包括以下步骤:
17.s21、将预处理后的遥感影像作为输入;
18.s22、利用ostu二值化分割算法,对近红外波段进行二值化处理,得到近红外层;
19.s23、基于红光波段,掩膜去除近红外层,利用ostu二值化分割算法,对掩膜后的红光波段进行二值化处理,得到红光层;
20.s24、基于绿光波段,掩膜去除近红外层、红光层,利用ostu二值化分割算法,对掩膜后的绿光波段进行二值化处理,得到绿光层;
21.s25、基于蓝光波段,掩膜去除近红外层、红光层和绿光层,得到蓝光层。
22.进一步的,所述基于光谱分层的浅海水深算法包括基于光谱分层的 stumpf比值反演算法及基于光谱分层的lyzenga多项式反演算法。
23.进一步的,所述基于光谱分层的stumpf比值反演算法的计算公式如下:
[0024][0025]
其中,z表示水深;
[0026]
及依次表示红光层、绿光层及蓝光层中比值模型斜率常数;
[0027]
及依次表示红光层、绿光层及蓝光层中水深0米时,对数比值的偏移量;
[0028]
n表示固定常数;
[0029]
r(λr)、r(λg)及r(λb)依次表示红波段、绿波段及蓝波段的反射率;
[0030]
lr、lg及lb依次表示红光层、绿光层及蓝光层。
[0031]
进一步的,所述基于光谱分层的lyzenga多项式反演算法的计算公式如下:
[0032][0033]
其中,z表示水深;
[0034]
和表示红光层线性回归系数;
[0035]
和表示绿光层线性回归系数;
[0036]
和表示蓝光层线性回归系数;
[0037]
n表示参加反演的波段数量;
[0038]
r(λi)表示波段i的反射率;
[0039]r∞
(λi)表示波段i对应的深水区反射率均值。
[0040]
根据本发明的另一方面,提供了一种基于光谱分层的浅海水深反演系统,该系统包括:数据处理模块、光谱分层提取模块及算法建立模块;
[0041]
其中,数据处理模块,用于基于计算机数字图像处理技术对预设的遥感影像数据集进行预处理;
[0042]
光谱分层提取模块,用于基于多光谱测深性能和影像分割的无参数光谱分层策略,获取遥感影像波段分量;
[0043]
算法建立模块,用于通过获取的所述遥感影像波段分量建立基于光谱分层的浅海水深反演算法。
[0044]
进一步的,所述用于基于计算机数字图像处理技术对预设的遥感影像数据集进行预处理包括以下步骤:
[0045]
利用sentinel-2影像推荐的snap插件对sentinel-2遥感影像进行大气校正;
[0046]
通过海图数据与研究区影像数据进行地理配准,并从所述海图数据上提取水深30m以深范围作为掩膜文件,对遥感影像进行掩膜处理并去除影像中的深水区域;
[0047]
利用3
×
3大小的窗口对掩膜后的遥感影像进行均值滤波。
[0048]
进一步的,所述基于多光谱测深性能和影像分割的无参数光谱分层策略,获取遥感影像波段分量包括以下步骤:
[0049]
将预处理后的遥感影像作为输入;
[0050]
利用图像掩膜和ostu二值化分割算法,依次对近红外、红光、绿光和蓝光波段进行处理,得到近红外层、红光层、绿光层及蓝光层。
[0051]
进一步的,所述基于光谱分层的浅海水深算法包括基于光谱分层的 stumpf比值
反演算法及基于光谱分层的lyzenga多项式反演算法。
[0052]
本发明的有益效果为:
[0053]
1、本发明提出一种基于光谱分层的浅海水深反演方法,解决了传统水深反演算法没有顾及不同光谱的测深极限与适用范围的问题,为浅海水深反演提供了一种更高精度的方法。
[0054]
2、本发明提出一种基于多光谱测深性能和影像分割的无参数光谱分层策略,无需输入任何参数,划分了红光层、绿光层、蓝光层,有效区分了多光谱遥感影像不同波段的测深性能,提高了水深反演精度。
[0055]
3、本发明基于应用最广泛的stumpf比值和lyzenga多项式经典算法,分别提供了基于光谱分层的stumpf比值算法和基于光谱分层的lyzenga多项式算法,算法使用场景与经典算法一致,有利于本发明算法的推广应用,为岛礁建设、航行安全、生态保护等应用提供技术支撑。
附图说明
[0056]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0057]
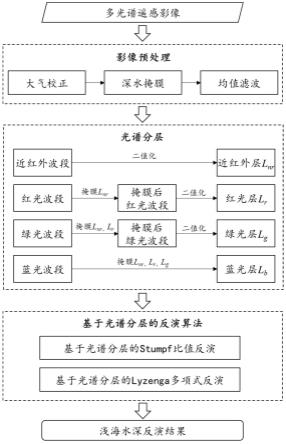
图1是根据本发明实施例的一种基于光谱分层的浅海水深反演方法的流程图;
[0058]
图2是实例中研究区概况图;
[0059]
图3是实例中研究区分层示例图;
[0060]
图4是实例中研究区浅海水深反演结果图;
[0061][0062]
图中:
[0063]
1、数据处理模块;2、光谱分层提取模块;3、算法建立模块。
具体实施方式
[0064]
为进一步说明各实施例,本发明提供有附图,这些附图为本发明揭露内容的一部分,其主要用以说明实施例,并可配合说明书的相关描述来解释实施例的运作原理,配合参考这些内容,本领域普通技术人员应能理解其他可能的实施方式以及本发明的优点,图中的组件并未按比例绘制,而类似的组件符号通常用来表示类似的组件。
[0065]
根据本发明的实施例,提供了一种基于光谱分层的浅海水深反演方法及系统。
[0066]
现结合附图和具体实施方式对本发明进一步说明,如图1所示,根据本发明的一个实施例,提供了一种基于光谱分层的浅海水深反演方法,该方法包括以下步骤:
[0067]
s1、基于计算机数字图像处理技术对预设的遥感影像数据集进行预处理;具体包括大气校正、深水掩膜及均值滤波。
[0068]
s2、基于多光谱测深性能和影像分割的无参数光谱分层策略,获取遥感影像波段分量;
[0069]
s3、通过获取的所述遥感影像波段分量建立基于光谱分层的浅海水深反演算法。
[0070]
在一个实施例中,所述基于计算机数字图像处理技术对遥感影像数据集进行预处理包括以下步骤:
[0071]
s11、利用sentinel-2影像推荐的snap插件对sentinel-2遥感影像进行大气校正;其中,经过大气校正后的遥感影像用于后续处理;
[0072]
s12、通过海图数据与研究区影像数据进行地理配准,并从所述海图数据上提取水深30m以深范围作为掩膜文件,对遥感影像进行掩膜处理并去除影像中的深水区域;
[0073]
s13、利用3
×
3大小的窗口对掩膜后的遥感影像进行均值滤波。
[0074]
如图3所示,在一个实施例中,所述基于多光谱测深性能和影像分割的无参数光谱分层策略,获取遥感影像波段分量包括以下步骤:
[0075]
s21、将预处理后的遥感影像作为输入;
[0076]
s22、利用ostu二值化分割算法,对近红外波段进行二值化处理,得到近红外层;
[0077]
s23、基于红光波段,掩膜去除近红外层,利用ostu二值化分割算法,对掩膜后的红光波段进行二值化处理,得到红光层;
[0078]
s24、基于绿光波段,掩膜去除近红外层、红光层,利用ostu二值化分割算法,对掩膜后的绿光波段进行二值化处理,得到绿光层;
[0079]
s25、基于蓝光波段,掩膜去除近红外层、红光层和绿光层,得到蓝光层。
[0080]
具体的,近红外层提取,利用近红外波段无法穿透水体的特性,通过 ostu算法二值化近红外波段影像i
nr
,分割出的前景色区域为近红外层 l
nr
,l
nr
层记录了水面高频噪声(如白冒、船只、厚云等)与陆地区域,用于水面噪声和陆地掩膜,若研究区无此类区域,则可省略此步骤;
[0081]
红光层提取,利用红光最大可穿透5m左右水深的特性,基于多光谱影像中的红光波段影像ir,首先,掩膜掉近红外层l
nr
区域;然后,利用ostu算法对掩膜后的红光波段影像ir进行二值化处理,其前景色为水下红光信号可达区域,即红光层lr;
[0082]
绿光层提取,利用绿光最大可穿透15m左右水深的特性,基于多光谱影像中的绿光波段影像ig,首先,掩膜掉近红外层l
nr
及红光层lr区域;然后,利用ostu算法对掩膜后的绿光波段影像ig进行二值化处理,其前景色为水下绿光信号可达但红光不可达区域,即绿光层lg;
[0083]
蓝光层提取,利用蓝光最大可穿透30m左右水深的特性,基于多光谱影像中的蓝光波段影像ib,首先,掩膜掉近红外层l
nr
、红光层lr和绿光层lg区域;然后,将剩余区域作为蓝光层lb。
[0084]
在一个实施例中,所述基于光谱分层的浅海水深算法包括基于光谱分层的stumpf比值反演算法及基于光谱分层的lyzenga多项式反演算法。
[0085]
在一个实施例中,所述基于光谱分层的stumpf比值反演算法的计算公式如下:
[0086][0087]
其中,z表示水深;
[0088]
及依次表示红光层、绿光层及蓝光层中比值模型斜率常数;
[0089]
及依次表示红光层、绿光层及蓝光层中水深0米时,对数比值的偏移量;
[0090]
n表示固定常数;取值为1000;
[0091]
r(λr)、r(λg)及r(λb)依次表示红波段、绿波段及蓝波段的反射率;
[0092]
lr、lg及lb依次表示红光层、绿光层及蓝光层;
[0093]
具体的,此处需注意的是,不同于经典stumpf比值算法中只能采用一组波段组合(通常为蓝、绿波段组合)参与水深反演,本发明的算法采用了两组波段组合(红、蓝波段组合,以及蓝、绿波段组合)参与水深反演。
[0094]
在一个实施例中,所述基于光谱分层的lyzenga多项式反演算法的计算公式如下:
[0095][0096]
其中,z表示水深;
[0097]
和表示红光层线性回归系数;
[0098]
和表示绿光层线性回归系数;
[0099]
和表示蓝光层线性回归系数;
[0100]
n表示参加反演的波段数量;
[0101]
r(λi)表示波段i的反射率;
[0102]r∞
(λi)表示波段i对应的深水区反射率均值。
[0103]
在具体应用时,本发明常用的均方根误差(root mean square error, rmse)对该算法获取的水深反演结果精度进行定量评价。其中rmse越小,表明水深反演的精度越高,则均方根误差的计算公式如下:
[0104][0105]
其中,ei表示反演水深值与对应的实测水深值之间的差值;
[0106]
n表示实测水深测试样本个数。
[0107]
具体的,下面就以具体实施例对本发明进行详细说明;
[0108]
以我国南沙海域长线礁为实验区(如图2所示),遥感影像数据为sentinel-2卫星影像,影像获取时间为2018年5月9日2时35分(utc),采用sentinel-2波段为近红外、红、绿、蓝波段,空间分辨率10m。实测水深数据采集仪器为odom hydrotracⅱ单波束声呐设备和sonic 2024多波束声呐设备,采集时间为2018年1月18日至1月20日,水深基准面为理论深度基准面,水深范围70m以浅,测深数据垂直精度和水平精度均符合 iho(international hydrographic organization)order1类标准,即垂直定位不确定度小于((0.5)^2+(0.013
×
depth)^2)^(1/2)m,水平定位不确定度小于(5+0.05
×
depth)m。经查潮汐表,长线礁影像获取时刻潮高为 1.48m,实验区实测水深已校正为影像获取时刻瞬时海面水深,并提取 0-30m水深,作为本发明实验水深数据。水深训练样本和测试样本选用 sentinel-2影像像元均值水深,即对单个像元内部的实测水深数据求均值作为该像元的水深值,实验区水深像元共计1127个。
[0109]
其中,对比分析经典stumpf比值算法与基于光谱分层的stumpf比值算法,以及经典lyzenga多项式算法与基于光谱分层的lyzenga多项式算法的水深反演结果(如图4所示)。从图4来看,基于光谱分层的反演算法优于经典算法,相对于经典算法反演结果(图4(a),4(c)),基于光谱分层算法的反演结果在深水区斑点噪声更少,且浅水区域礁盘轮廓更加清晰(图4(b),4(d)),从水深均方根误差(rmse)来看,基于光谱分层的反演算法同样优于经典算法,本发明提出的基于光谱分层的浅海水深反演方法具有优异的水深反演性能;
[0110]
此外,对于图4中,图(a)表示stumpf算法结果,rmse=4.46m;
[0111]
图(b)表示基于光谱分层的stumpf算法结果,rmse=3.57m;
[0112]
图(c)表示lyzenga算法结果,rmse=3.34m;
[0113]
图(d)表示基于光谱分层的lyzenga算法结果,rmse=2.70m。
[0114]
根据本发明的另一个实施例,提供了一种基于光谱分层的浅海水深反演系统,该系统包括:数据处理模块1、光谱分层提取模块2及算法建立模块3;
[0115]
其中,数据处理模块1,用于基于计算机数字图像处理技术对预设的遥感影像数据集进行预处理;
[0116]
光谱分层提取模块2,用于基于多光谱测深性能和影像分割的无参数光谱分层策略,获取遥感影像波段分量;
[0117]
算法建立模块3,用于通过获取的所述遥感影像波段分量建立基于光谱分层的浅海水深反演算法。
[0118]
在一个实施例中,所述用于基于计算机数字图像处理技术对预设的遥感影像数据
集进行预处理包括以下步骤:
[0119]
利用sentinel-2影像推荐的snap插件对sentinel-2遥感影像进行大气校正;
[0120]
通过海图数据与研究区影像数据进行地理配准,并从所述海图数据上提取水深30m以深范围作为掩膜文件,对遥感影像进行掩膜处理并去除影像中的深水区域;
[0121]
利用3
×
3大小的窗口对掩膜后的遥感影像进行均值滤波。
[0122]
在一个实施例中,所述基于多光谱测深性能和影像分割的无参数光谱分层策略,获取遥感影像波段分量包括以下步骤:
[0123]
将预处理后的遥感影像作为输入;
[0124]
利用图像掩膜和ostu二值化分割算法,依次对近红外、红光、绿光和蓝光波段进行处理,得到近红外层、红光层、绿光层及蓝光层。
[0125]
在一个实施例中,所述基于光谱分层的浅海水深算法包括基于光谱分层的stumpf比值反演算法及基于光谱分层的lyzenga多项式反演算法。
[0126]
综上所述,借助于本发明的上述技术方案,本发明提出一种基于光谱分层的浅海水深反演方法,解决了传统水深反演算法没有顾及不同光谱的测深极限与适用范围的问题,为浅海水深反演提供了一种更高精度的方法;本发明提出一种基于多光谱测深性能和影像分割的无参数光谱分层策略,无需输入任何参数,划分了红光层、绿光层、蓝光层,有效区分了多光谱遥感影像不同波段的测深性能,提高了水深反演精度;本发明基于应用最广泛的stumpf比值和 lyzenga多项式经典算法,分别提供了基于光谱分层的stumpf比值算法和基于光谱分层的lyzenga多项式算法,算法使用场景与经典算法一致,有利于本发明算法的推广应用,为岛礁建设、航行安全、生态保护等应用提供技术支撑。
[0127]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1