路侧雷达的标定方法、装置、设备及存储介质与流程
本技术涉及智能交通领域,尤其涉及一种路侧雷达的标定方法、装置、设 备及存储介质。
背景技术:
1、随着智能交通系统和智能网联汽车产业的发展,路侧感知系统发挥着越来 越重要的作用。路侧感知系统通过在路侧布置传感器(包括摄像头、毫米波雷达、 激光雷达等),实时感知道路上交通信息并实时将感知信息发送给行驶在道路上 的车辆,从而能够有效弥补车载感知的盲区,提升交通通行的安全性。
2、在使用路侧雷达,尤其是毫米波雷达感知道路交通信息时,需要先对所述 毫米波雷达进行标定,从而根据标定的毫米波雷达,结合车辆与雷达的位置关 系,确定车辆的位置。在使用车辆传感器的定位信息与路侧雷达检测的车辆位 置信息对路侧雷达进行定位时,由于路侧雷达的噪点多,并且路侧雷达检测的 车辆的id可能不连续等原因,不能够准确的由毫米波雷达的检测数据生成的轨 迹,不利于提高路侧毫米波雷达的标定精度。
3、为了提升毫米波雷达的标定精度,传统的路侧毫米波雷达标定方法,主要 是通过在道路上放置角反射器获得目标在毫米波雷达中的坐标系,同时通过手 持式gps定位装置获得目标的地理坐标,然后再计算两者的标定关系,该方法 在标定时需要封闭道路。这是因为在公开道路上标定时,放置反射器或者持有 定位装置的工程师会有存在碰撞风险。如果封闭公开的道路,则需要向交通管 理部门申请,且会影响正常的交通通行。而当前大部分设计路侧感知系统的项 目在公开道路上进行,在路侧毫米波雷达标定时,很难获得交通管理部门的批 准进行封闭道路。
技术实现思路
1、有鉴于此,本技术实施例提供了一种路侧雷达的标定方法、装置、设备及 存储介质,以解决现有技术中在使用车辆传感器的定位信息与毫米波雷达检测 的车辆位置信息对毫米波雷达进行定位时,为了提升标定精度,需要对道路申 请封闭,影响正常的交通通行的问题。
2、本技术实施例的第一方面提供了一种路侧雷达的标定方法,所述方法包括:
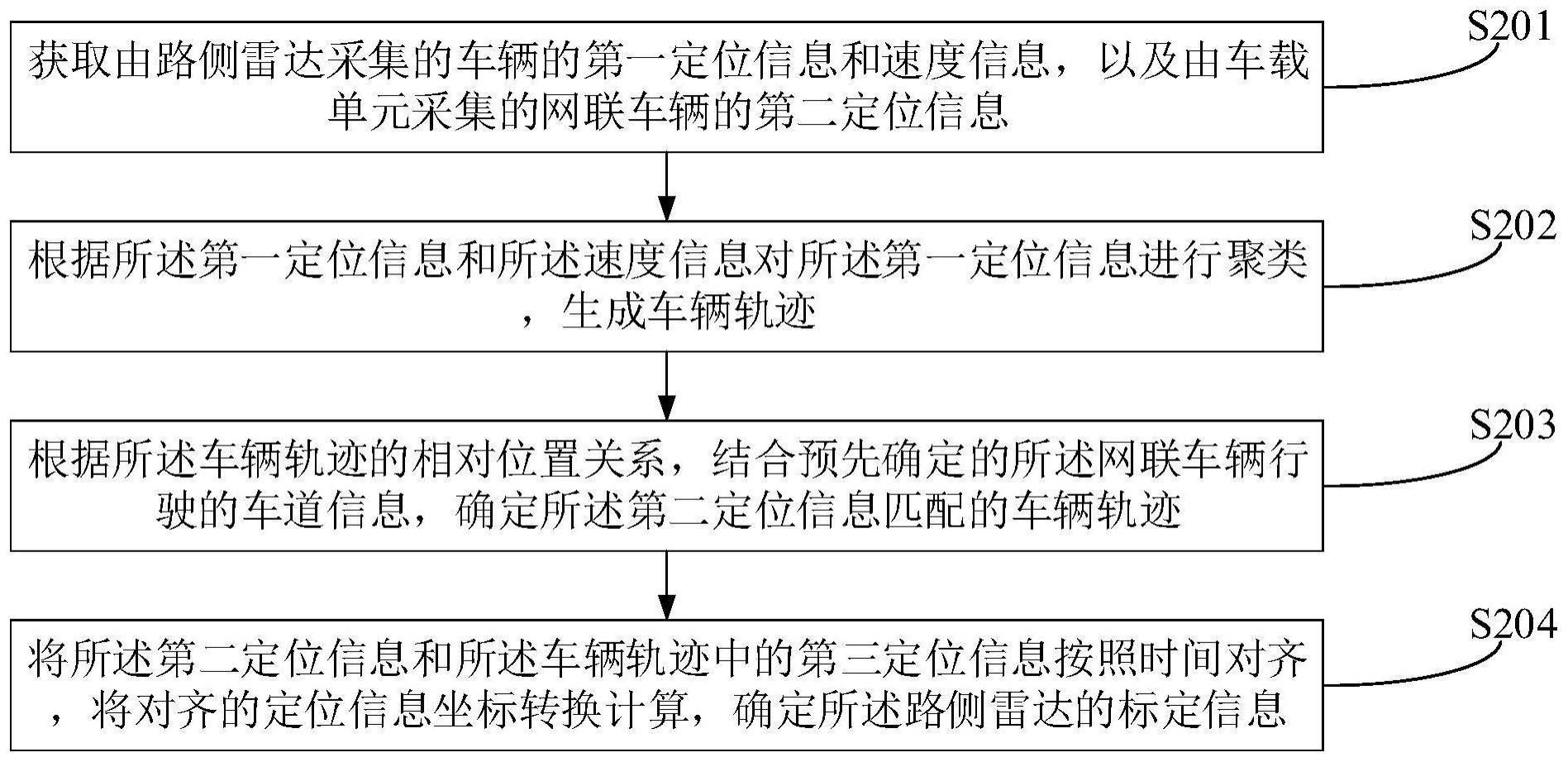
3、获取由路侧雷达采集的车辆的第一定位信息和速度信息,以及由车载单元 采集的网联车辆第二定位信息和网联车辆行驶车道信息;
4、根据所述第一定位信息和所述速度信息对所述第一定位信息进行聚类,生 成车辆轨迹;
5、根据所述车辆轨迹的相对位置关系,结合所述网联车辆行驶的车道信息, 确定所述第二定位信息匹配的车辆轨迹;
6、将所述第二定位信息和所述车辆轨迹中的第三定位信息按照时间对齐,将 对齐的定位信息坐标转换计算,确定所述路侧雷达的标定信息。
7、结合第一方面,在第一方面的第一种可能实现方式中,根据所述第一定位 信息和所述速度信息对所述第一定位信息进行聚类,生成车辆轨迹,包括:
8、根据所述第一定位信息和所述速度信息,计算所述第一定位信息中的定位 点之间的距离;
9、根据所述定位点之间的距离进行聚类,由聚类的定位点生成车辆轨迹。
10、结合第一方面的第一种可能实现方式,在第一方面的第二种可能实现方式 中,根据所述第一定位信息和所述速度信息,计算所述第一定位信息中的定位 点之间的距离,包括:
11、根据公式计算所述第一定位信息中的两个定位点之间的距离,其中,x1,x2分别为两个定位点在预设的毫米波雷达 坐标系中的x坐标,单位为米;y1,y2分别为两个定位点在所述毫米波雷达坐标 系中的y坐标,单位为米;ts1,ts2分别为两个定位点的时间戳,单位为秒;v1,v2分 别为两个定位点的速度,单位为米每秒。
12、结合第一方面,在第一方面的第三种可能实现方式中,将所述第二定位信 息和所述车辆轨迹中的第三定位信息按照时间对齐,包括:
13、确定所述第三定位信息的插值公式;
14、根据所述插值公式确定所述车辆在对齐时刻时,在路侧雷达坐标系中的定 位信息。
15、结合第一方面,在第一方面的第四种可能实现方式中,将对齐的定位信息 坐标转换计算,确定所述路侧雷达的标定信息,包括:
16、在对齐的定位信息中,选择预定数量的对齐数据;
17、将所述对齐数据代入预设的坐标系转换方程,确定作为标定信息的转换矩 阵。
18、结合第一方面的第四种可能实现方式,在第一方面的第五种可能实现方式 中,所述对齐数据包括基于局部enu坐标系的定位信息和基于路侧雷达坐标系 的定位信息;将所述对齐数据代入预设的坐标系转换方程,确定作为标定信息 的转换矩阵包括:将所述基于局部enu坐标系的定位信息和基于路侧雷达坐标 系的定位信息的对齐数据,代入预设的局部enu坐标系-路侧雷达坐标系转换 方程,通过最小二乘法或非线性优化方法确定局部enu坐标系-路侧雷达坐标 系之间的转换矩阵;
19、或者,所述对齐数据包括基于地理坐标系的定位信息与路侧雷达的定位信 息;将所述对齐数据代入预设的坐标系转换方程,确定作为标定信息的转换矩 阵包括:将所述基于地理坐标系的定位信息和基于路侧雷达坐标系的定位信息 的对齐数据,代入预设的地理坐标系-路侧雷达坐标系转换方程,通过最小二乘 法确定地理坐标系-路侧雷达坐标系之间的转换矩阵。
20、结合第一方面,在第一方面的第六种可能实现方式中,在确定所述路侧雷 达的标定信息之后,所述方法还包括:
21、通过路侧雷达获取基于路侧雷达坐标系所确定的车辆定位信息;
22、通过所述转换矩阵,实时生成所述车辆在转换后的坐标系中的定位信息。
23、本技术实施例的第二方面提供了一种路侧雷达的标定装置,所述装置包括:
24、信息获取单元,用于获取由路侧雷达采集的车辆的第一定位信息和速度信 息,以及由车载单元采集的网联车辆的第二定位信息;
25、聚类单元,用于根据所述第一定位信息和所述速度信息对所述第一定位信 息进行聚类,生成车辆轨迹;
26、轨迹匹配单元,用于根据所述车辆轨迹的相对位置关系,结合预先确定的 所述网联车辆行驶的车道信息,确定所述第二定位信息匹配的车辆轨迹;
27、标定信息确定单元,用于将所述第二定位信息和所述车辆轨迹中的第三定 位信息按照时间对齐,将对齐的定位信息坐标转换计算,确定所述路侧雷达的 标定信息。
28、本技术实施例的第三方面提供了路侧雷达的标定设备,包括存储器、处理 器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理 器执行所述计算机程序时实现如第一方面任一项所述方法的步骤。
29、本技术实施例的第四方面提供了一种计算机可读存储介质,所述计算机可 读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如第一方 面任一项所述方法的步骤。
30、本技术实施例与现有技术相比存在的有益效果是:本技术实施例对路侧雷 达采集的第一定位信息和速度信息,对第一定位信息进行聚类生成车辆轨迹, 根据所生成的车辆轨迹与车载单元获取的第二定位信息进行时间对齐,基于对 齐的定位信息计算得到路侧雷达的标定信息,从而能够有效的解决路侧雷达的 噪点问题和不连续的问题,有利于提高路侧雷达的标定精度的同时,可以不需 要封闭公开道路即可完成对路侧雷达的标定,在标定过程中不会影响交通通行。
- 还没有人留言评论。精彩留言会获得点赞!