一种自由切换导航方式的组合导航方法及系统与流程
本申请涉及导航领域,尤其涉及一种自由切换导航方式的组合导航方法及系统。
背景技术:
1、agv(automated guided vehicle)自动引导车,是一种自动化的运输设备,通常用于工业和物流应用,以实现自动化的物料搬运和运输任务。
2、在现有技术中,agv在工作状态下,自动化的导航方式主要通过二维码导航,但二维码导航依赖在工厂地面设置的二维码标识,在实际情况中,二维码标识会因为agv的移动反复碾压,导致受损,且二维码导航能够导航的路线存在局限性,在agv遇到路径中有障碍时难以回避。
技术实现思路
1、本申请提供了一种自由切换导航方式的组合导航方法及系统,用于通过激光导航的灵活性完善agv在通过二维码导航时产生的局限性,同时降低对二维码导航中二维码标识的使用频率,提高二维码标识的使用寿命。
2、本申请第一方面提供了一种自由切换导航方式的组合导航方法,所述方法应用于设置有环境感知系统和导航组合系统的室内作业的自动引导车,包括:
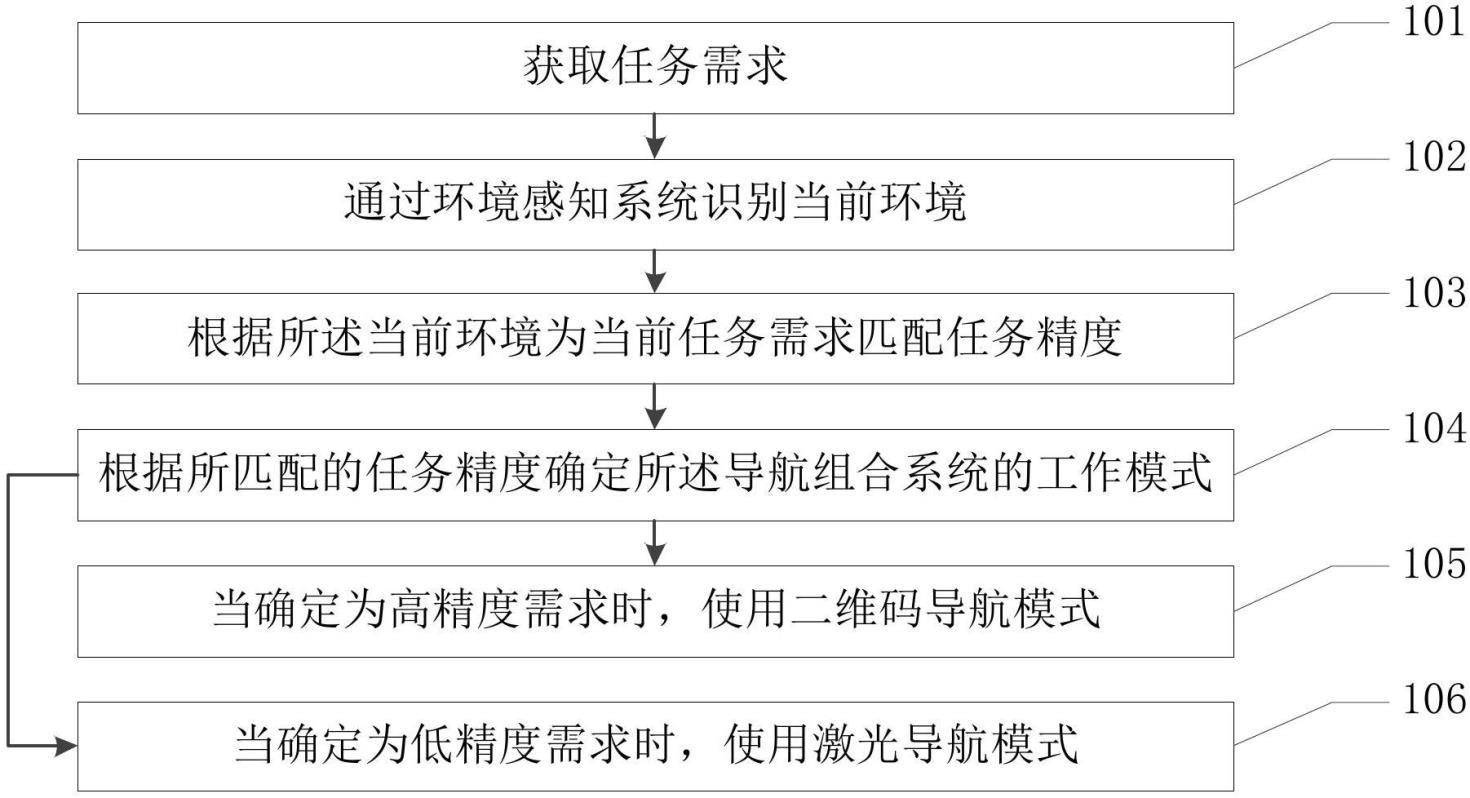
3、获取任务需求;
4、通过环境感知系统识别当前环境;
5、根据所述当前环境为当前任务需求匹配任务精度,所述任务精度分为高精度需求和低精度需求;
6、根据所匹配的任务精度确定所述导航组合系统的工作模式,所述工作模式包括激光导航模式和二维码导航模式;
7、当确定为高精度需求时,使用二维码导航模式;
8、当确定为低精度需求时,使用激光导航模式。
9、可选的,所述当确定为低精度需求时,使用激光导航模式之后,所述方法还包括:
10、获取实时定位;
11、根据所述实时定位判断当前位置是否存在激光导航地图;
12、若是,则激活激光导航模式。
13、可选的,所述获取实时定位之后,所述方法还包括:
14、判断所述实时定位是否成功获取;
15、若所述实时定位获取失败,则通过所述环境感知系统识别周围环境,并根据所述周围环境的数据进行实时定位。
16、可选的,所述当确定为高精度需求时,使用二维码导航模式之后,所述方法还包括:
17、激活二维码视觉相机;
18、根据所述二维码视觉相机的反馈数据获取偏移量;
19、根据所述偏移量对位移方向进行修正。
20、可选的,所述根据所述当前环境为当前任务需求匹配任务精度包括:
21、获取所述环境感知系统的反馈数据;
22、根据所述反馈数据判断当前是否处于作业环境;
23、若处于作业环境,则匹配为高精度需求;
24、若处于非作业环境,则匹配为低精度需求。
25、可选的,所述通过环境感知系统识别当前环境之后,所述方法包括:
26、判断所述当前环境是否存在障碍物;
27、若是,则通过所述环境感知系统辅助障碍物避让。
28、本申请第二方面提供了一种切换导航方式的系统,所述系统应用于设置有环境感知系统和导航组合系统的室内作业的自动引导车,所述系统包括:
29、第一获取单元,用于获取任务需求;
30、第一识别单元,用于通过环境感知系统识别当前环境;
31、匹配单元,用于根据所述当前环境为当前任务需求匹配任务精度,所述任务精度分为高精度需求和低精度需求;
32、确定单元,用于根据所匹配的任务精度确定所述导航组合系统的工作模式,所述工作模式包括激光导航模式和二维码导航模式;
33、二维码导航单元,用于当确定为高精度模式时,使用二维码导航模式;
34、激光导航单元,用于当确定为低精度模式时,使用激光导航模式。
35、可选的,所述系统包括:
36、第二获取单元,用于获取实时定位;
37、第一判断单元,用于根据所述实时定位判断当前位置是否存在激光导航地图;
38、第一激活单元,用于当所述第一判断单元的判断结果为是时,则激活激光导航模式。
39、可选的,所述系统包括:
40、第二判断单元,用于判断所述实时定位是否成功获取;
41、第二识别单元,用于当所述第二判断单元判断结果为所述实时定位获取失败时,通过所述环境感知系统识别周围环境,以使得根据所述环境感知系统识别到的数据进行实时定位。
42、可选的,所述系统还包括:
43、第二激活单元,用于激活二维码视觉相机;
44、第三获取单元,用于根据所述二维码视觉相机的反馈数据获取偏移量;
45、修正单元,用于根据所述偏移量对位移方向进行修正。
46、可选的,所述匹配单元包括:
47、获取模块,用于获取所述环境感知系统的反馈数据;
48、第一判断模块,用于根据所述反馈数据判断当前是否处于作业环境;
49、第一匹配模块,用于当所述第一判断模块的判断结果为处于作业环境时,匹配为高精度模式;
50、第二匹配模块,用于当所述第一判断模块的判断结果为处于非作业环境时,匹配为低精度模式。
51、可选的,所述系统包括:
52、第三判断单元,用于判断所述当前环境是否存在障碍物;
53、第三激活单元,用于当所述第三判断单元的判断结果为是时,通过所述环境感知系统辅助障碍物避让。
54、本申请第三方面提供了一种切换导航方式的系统,包括:
55、处理器、存储器、输入输出单元、总线;
56、所述处理器与所述存储器、所述输入输出单元以及所述总线相连;
57、所述处理器具体执行与前述第一方面相同的操作。
58、从以上技术方案可以看出,通过对获取到的任务需求进行解析,结合环境感知系统对周围环境进行获取从而确定当前所需的任务精度,并通过任务精度对导航模式进行确定,组合导航模式分为激光导航和二维码导航两种导航模式,以使得在agv(automatedguided vehicle)自动引导车在执行任务的过程中能够通过激光导航配合二维码导航,以使得通过激光导航的灵活性完善agv在通过二维码导航时产生的局限性,同时降低对二维码导航中二维码标识的使用频率,提高二维码标识的使用寿命。
技术特征:
1.一种自由切换导航方式的组合导航方法,其特征在于,所述方法应用于设置有环境感知系统和导航组合系统的室内作业的自动引导车,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述当确定为低精度需求时,使用激光导航模式之后,所述方法还包括:
3.根据权利要求2所述的方法,其特征在于,所述获取实时定位之后,所述方法还包括:
4.根据权利要求1所述的方法,其特征在于,所述当确定为高精度需求时,使用二维码导航模式之后,所述方法还包括:
5.根据权利要求1至4中任一项所述的方法,其特征在于,所述根据所述当前环境为当前任务需求匹配任务精度包括:
6.根据权利要求1至4中任一项所述的方法,其特征在于,所述通过环境感知系统识别当前环境之后,所述方法包括:
7.一种切换导航方式的系统,其特征在于,所述系统应用于设置有环境感知系统和导航组合系统的室内作业的自动引导车,所述系统包括:
8.根据权利要求7所述的系统,其特征在于,所述系统包括:
9.根据权利要求8所述的系统,其特征在于,所述系统包括:
10.根据权利要求7所述的系统,其特征在于,所述系统还包括:
技术总结
本申请公开了一种自由切换导航方式的组合导航方法及系统,用于通过激光导航的灵活性完善AGV在通过二维码导航时产生的局限性,同时降低对二维码导航中二维码标识的使用频率,提高二维码标识的使用寿命。所述方法应用于设置有环境感知系统和导航组合系统的室内作业的自动引导车。本申请方法包括:获取任务需求;通过环境感知系统识别当前环境;根据所述当前环境为当前任务需求匹配任务精度,所述任务精度分为高精度需求和低精度需求;根据所匹配的任务精度确定所述导航组合系统的工作模式,所述工作模式包括激光导航模式和二维码导航模式;当确定为高精度需求时,使用二维码导航模式;当确定为低精度需求时,使用激光导航模式。
技术研发人员:蒋元陈,郭瑞岩,范生宏,何明学,唐宇
受保护的技术使用者:普达迪泰(成都)智造研究院有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!