数据处理方法与处理装置与流程
本技术涉及雷达,尤其涉及一种数据处理方法与处理装置。
背景技术:
1、车载雷达设备,主要用于检测车辆当前驾驶区域内的路面情况,对辅助车辆避障和感知车辆周边环境具有重要作用。其中,车载雷达设备的目标检测主要包括获取目标点与车辆之间的距离、目标点的速度和目标点物与车辆之间的角度信息。
2、车载雷达设备进行目标检测的一种方法如下:获取雷达的n个接收天线中每个接收天线采集的快时间维-慢时间维数据,并对每个快时间维-慢时间维数据进行二维离散快速傅里叶变换(two-dimensional discrete fast fourier transform,2dfft),得到n个距离多普勒图(range-doppler map,rd-map)数据,其中,每个距离多普勒图数据包括速度信息和距离信息;然后,基于n个rd-map数据,使用非相干积累加(non-coherentaccumulation,nci)和恒虚警率(constant false-alarm rate,cfar)确定目标距离和目标速度(该目标距离和目标速度上的物体才认为是需要检测的目标,并且该目标距离和目标速度对应的需要检测的目标点还可能是多个),并从每个rd-map数据中提取出目标距离和目标速度上的数据,形成一组包括n个数据的数据;之后,基于该组数据,获得多组不同的数据,其中,多组数据中每组数据包括n个数据中的m个数据,m小于n;最后,将多组数据输入至超分辨率算法中,以检测出目标距离和目标速度上可能存在的目标点的角度。
3、但是,上述过程导致检测出的目标距离和目标速度上的目标点的准确度较低。
4、因此,如何提升检测出的目标距离和目标速度上的目标物的准确率成为亟待解决的技术问题。
技术实现思路
1、本技术提供了一种数据处理方法与处理装置,可以提升检测出的第一目标距离和第一目标速度上的目标物的准确率。
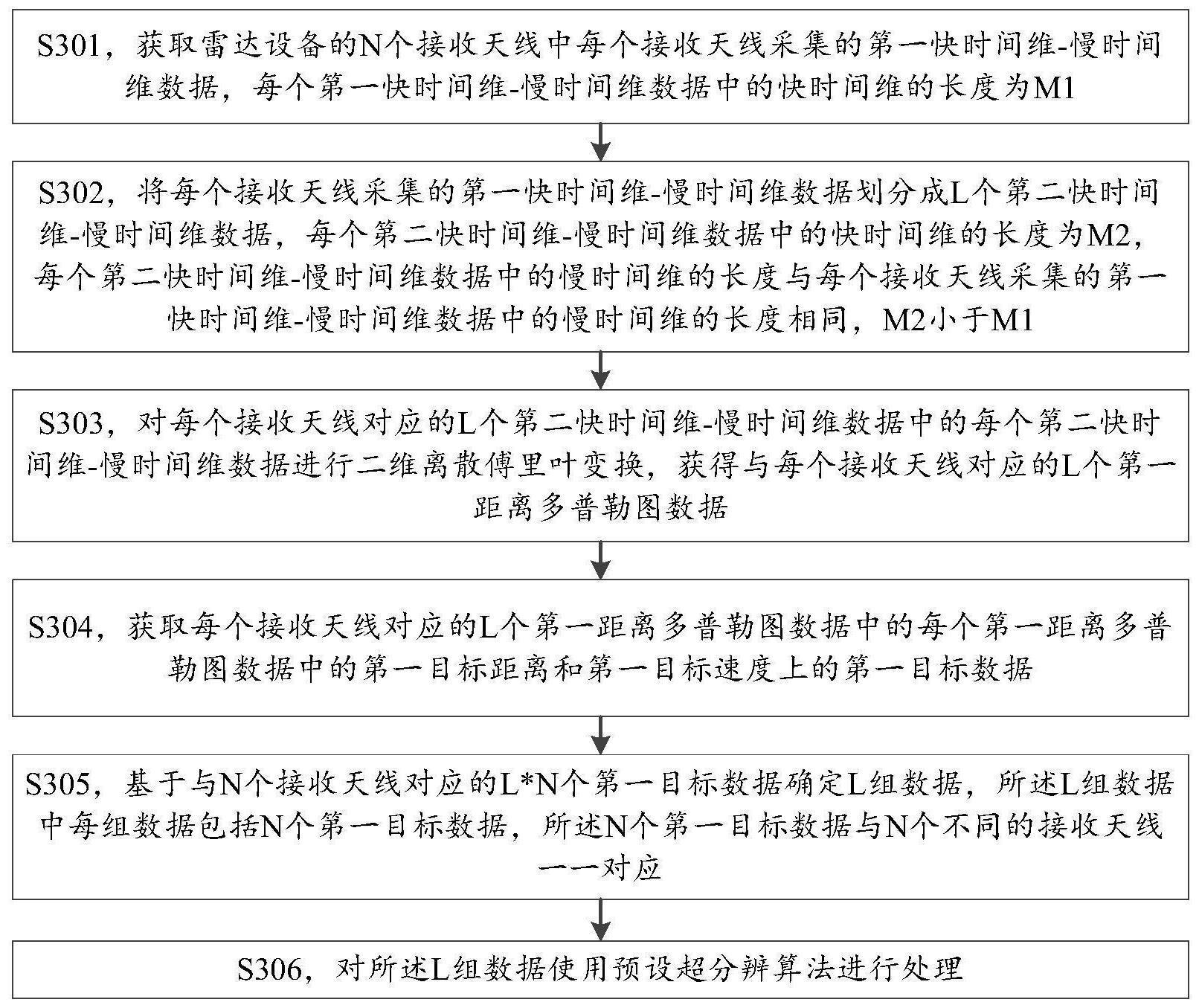
2、第一方面,本技术提供一种数据处理方法,包括:获取雷达设备的n个接收天线中每个接收天线采集的第一快时间维-慢时间维数据,每个第一快时间维-慢时间维数据中的快时间维的长度为m1;将所述每个接收天线采集的第一快时间维-慢时间维数据划分成l个第二快时间维-慢时间维数据,每个第二快时间维-慢时间维数据中的快时间维的长度为m2,所述每个第二快时间维-慢时间维数据中的慢时间维的长度与所述每个接收天线采集的第一快时间维-慢时间维数据中的慢快时间维的长度相同,m2小于m1;对所述每个接收天线对应的l个第二快时间维-慢时间维数据中的每个第二快时间维-慢时间维数据进行二维离散傅里叶变换,获得与所述每个接收天线对应的l个第一距离多普勒图数据;获取所述每个接收天线对应的l个第一距离多普勒图数据中的每个第一距离多普勒图数据中的第一目标距离和第一目标速度上的第一目标数据;基于与所述n个接收天线对应的l*n个第一目标数据确定l组数据,所述l组数据中每组数据包括n个第一目标数据,所述n个第一目标数据与n个不同的接收天线一一对应;对所述l组数据使用预设超分辨算法进行处理。
3、本实施例中,雷达设备将n个接收天线中每个接收天线获取的第一快时间维-慢时间维数据沿着快时间维划分为l个第二快时间维-慢时间维数据,从而对于每个接收天线会有l个第二快时间维-慢时间维数据,和对于n个接收天线总共会有l*n个第二快时间维-慢时间维数据;之后,对l*n个第二快时间维-慢时间维数据中的每个第二快时间维-慢时间维数据进行二维离散快速傅里叶变换,获得l*n个第一距离多普勒图数据,并从每个第一距离多普勒图数据中提取出第一目标距离和第一目标速度上的目标数据,即有l*n个目标数据,最后将l*n个目标数据形成l组数据,其中,每组数据中都包括n个目标数据且该n个目标数据与n个不同的接收天线对应。
4、可以理解的是,在现有技术中,雷达设备在获得与n个接收天线对应的第一目标距离和第一目标速度上的n个目标数据后,会先将该n个目标数据形成一组数据;然后在基于该组数据获得多组数据,其中,该获得的多组数据中的每组数据中只包括了n个目标数据中的m个目标数据,m小于n;最后,使用预设超分辨率算法对多组数据进行处理。可以看出,在现有技术中,雷达设备在使用预设超分辨率算法对多组数据进行处理时,每组数据都没有完全使用雷达设备的n个接收天线采集的数据。应理解,没有完全使用雷达设备的n个接收天线采集的数据,本质上相当于减小了雷达设备的天线口径,从而会导致雷达设备的角度分辨率降低,进一步导致检测出的第一目标距离和第一目标速度上的目标点的准确度较低。而在本实施例中,由于输入到预设超分辨算法中的每组数据都包括n个目标数据,且由于该n个目标数据与n个不同的接收天线对应,因此,相当于保持了原有的雷达设备的天线口径,因此,不会降低雷达设备的角度分辨率,即提升了检测出的目标距离和目标速度上的目标物的准确率。
5、结合第一方面,在一种可能的实现方式中,所述方法还包括:对所述每个接收天线采集的第一快时间维-慢时间维数据进行二维离散傅里叶变换,获得所述每个接收天线对应的第二距离多普勒图数据;将与所述n个接收天线一一对应的n个第二距离多普勒图数据进行非相干累加nci,获得第三距离多普勒图;获取所述第三距离多普勒图上的第二目标数据,所述第二目标数据为满足预设条件的数据;将所述第二目标数据在所述第三距离多普勒图上的距离信息和速度信息分别确定为所述第一目标距离和所述第一目标速度。
6、结合第一方面,在一种可能的实现方式中,所述方法还包括:将与所述n个接收天线对应的l*n个第一距离多普勒图数据进行非相干累加nci,获得第四距离多普勒图;获取所述第四距离多普勒图上的第三目标数据,所述第三目标数据为满足预设条件的数据;将所述第三目标数据在所述第四距离多普勒图上的距离信息和速度信息分别确定为所述第一目标距离和所述第一目标速度。
7、结合第一方面,在一种可能的实现方式中,所述方法还包括:获取所述n个接收天线中的任意一个接收天线对应的l个第二快时间维-慢时间维数据;将所述任意一个接收天线对应的l个第二快时间维-慢时间维数据进行非相干累加nci,获得第五距离多普勒图;获取所述第五距离多普勒图上的第四目标数据,所述第四目标数据为满足预设条件的数据;将所述第四目标数据在所述第五距离多普勒图上的距离信息和速度信息分别确定为所述第一目标距离和所述第一目标速度。
8、结合第一方面,在一种可能的实现方式中,所述预设条件包括:所述满足预设条件的数据为距离多普勒图数据中的峰值数据。
9、第二方面,本技术提供一种数据处理装置,包括:获取模块,用于获取雷达设备的n个接收天线中每个接收天线采集的第一快时间维-慢时间维数据,每个第一快时间维-慢时间维数据中的快时间维的长度为m1;处理模块,用于将所述每个接收天线采集的第一快时间维-慢时间维数据划分成l个第二快时间维-慢时间维数据,每个第二快时间维-慢时间维数据中的快时间维的长度为m2,所述每个第二快时间维-慢时间维数据中的慢时间维的长度与所述每个接收天线采集的第一快时间维-慢时间维数据中的慢时间维的长度相同,m2小于m1;所述处理模块,还用于对所述每个接收天线对应的l个第二快时间维-慢时间维数据中的每个第二快时间维-慢时间维数据进行二维离散傅里叶变换,获得与所述每个接收天线对应的l个第一距离多普勒图数据;所述获取模块,还用于获取所述每个接收天线对应的l个第一距离多普勒图数据中的每个第一距离多普勒图数据中的第一目标距离和第一目标速度上的第一目标数据;处理模块,还用于基于与所述n个接收天线对应的l*n个第一目标数据确定l组数据,所述l组数据中每组数据包括n个第一目标数据,所述n个第一目标数据与n个不同的接收天线一一对应;所述处理模块还用于:对所述l组数据使用预设超分辨算法进行处理。
10、结合第二方面,在一种可能的实现方式中,所述处理模块还用于:对所述每个接收天线采集的第一快时间维-慢时间维数据进行二维离散傅里叶变换,获得所述每个接收天线对应的第二距离多普勒图数据;所述处理模块还用于:将与所述n个接收天线一一对应的n个第二距离多普勒图数据进行非相干累加nci,获得第三距离多普勒图;所述获取模块还用于:获取所述第三距离多普勒图上的第二目标数据,所述第二目标数据为满足预设条件的数据;所述处理模块还用于:将所述第二目标数据在所述第三距离多普勒图上的距离信息和速度信息分别确定为所述第一目标距离和所述第一目标速度。
11、结合第二方面,在一种可能的实现方式中,所述处理模块还用于:将与所述n个接收天线对应的l*n个第一距离多普勒图数据进行非相干累加nci,获得第四距离多普勒图;所述获取模块还用于:获取所述第四距离多普勒图上的第三目标数据,所述第三目标数据为满足预设条件的数据;所述处理模块还用于:将所述第三目标数据在所述第四距离多普勒图上的距离信息和速度信息分别确定为所述第一目标距离和所述第一目标速度。
12、结合第二方面,在一种可能的实现方式中,所述获取模块还用于:获取所述n个接收天线中的任意一个接收天线对应的l个第二快时间维-慢时间维数据;所述处理模块还用于:将所述任意一个接收天线对应的l个第二快时间维-慢时间维数据进行非相干累加nci,获得第五距离多普勒图;所述获取模块还用于:获取所述第五距离多普勒图上的第四目标数据,所述第四目标数据为满足预设条件的数据;所述处理模块还用于:将所述第四目标数据在所述第五距离多普勒图上的距离信息和速度信息分别确定为所述第一目标距离和所述第一目标速度。
13、结合第二方面,在一种可能的实现方式中,所述满足预设条件的数据为距离多普勒图数据中的峰值数据。
14、第三方面,本技术提供一种自动驾驶设备,包含如第二方面或其中任意一种可能的实现方式所述的装置。
15、示例性地,所述自动驾驶设备为车辆。
16、第四方面,本技术提供一种数据处理装置,包括:存储器和处理器;所述存储器用于存储程序指令;所述处理器用于调用所述存储器中的程序指令执行如第一方面或其中任意一种可能的实现方式中所述的方法。
17、第五方面,本技术提供一种计算机可读介质,所述计算机可读介质存储用于计算机执行的程序代码,该程序代码包括用于执行如第一方面或其中任意一种可能的实现方式中所述的方法的指令。
18、第六方面,本技术提供一种计算机程序产品,所述计算机程序产品中包括计算机程序代码,当所述计算机程序代码在计算机上运行时,使得所述计算机实现如第一方面或其中任意一种可能的实现方式中所述的方法。
- 还没有人留言评论。精彩留言会获得点赞!