一种岸-舰双基地高频地波雷达运动补偿方法
1.本发明属于雷达信号处理技术领域,涉及舰船检测方法。
背景技术:
2.高频地波雷达(high frequency surface wave radar,hfswr)利用垂直极化的电磁波在海面绕射传播的特性,可以实现对海超视距探测,但是传统的岸基雷达存在选址困难、灵活机动性差、生存能力弱的特点。为了解决以上问题,基于舰载平台的hfswr也随之产生,在继承了岸基hfswr优势的同时,可以指定舰船快速驶向指定目标海域完成对海洋环境的监测任务,机动性强,在对海面和低空动目标探测方面具有广泛的应用价值。但由于舰载平台空间有限,阵列孔径小,方位分辨率低、其估计精度差,为了提升方位分辨率,可以采用合成孔径信号处理方法,利用舰船平台的运动合成一个虚拟大孔径,实现方位分辨率的提升,可以分辨之前无法分辨的目标,进而提升目标探测、海态遥感的能力,对提高该体制雷达探测性能具有重要意义。
3.在舰载合成孔径体制下,雷达回波信号的多普勒谱受舰船运动影响,当舰船在海浪作用下存在六自由度运动时,会导致回波信号的多普勒谱不仅存在线性调制,还存在着非线性调制,这种非线性调制可近似为多个正弦调制的叠加,且随着海态的变化,其幅度和周期也随之变化。由于舰载hfswr的多普勒调频率较低,即使是在低海况下该正弦调制的幅值也远大于调频率,因此这种正弦调制会使得合成孔径处理时的方位压缩函数失配,导致目标散焦,影响检测性能。因此,需要在方位压缩前对回波信号进行运动补偿。
4.目前为止,国内还很少在高频地波雷达方面应用合成孔径信号处理方法,现有的大多数舰载hfswr运动补偿相关研究只考虑了平台的六自由度运动对目标回波信号多普勒谱的影响,未考虑到当目标是舰船时也存在着六自由度运动,其也会对回波信号的多普勒谱产生类似影响。另外前人研究只考虑了六自由度运动对回波信号多普勒谱的影响,未考虑其对回波信号时频谱的影响。
技术实现要素:
5.本发明为了解决舰船的六自由度运动导致合成孔径处理时存在目标方位散焦的问题。
6.一种岸-舰双基地高频地波雷达运动补偿方法,岸基发射机向目标海域发射雷达信号,照射到目标舰船后电磁波沿海面绕射传播,接收舰船接收到回波信号后通过本发明方法实现对目标探测;所述方法包括以下步骤:
7.步骤1、考虑舰船在振荡运动作用下,建立岸基发射-舰载接收模式下高频地波雷达的距离方程r(ta),并得到在距离快时间-方位慢时间域(tr,ta)内的舰载平台接收的目标舰船回波信号sr(tr,ta);ta表示舰船运动对应的慢时间,tr为快时间;
8.步骤2、对回波信号sr(tr,ta)进行距离压缩处理,将距离匹配函数h1(tr)与回波信号在频域相乘即实现距离压缩;
9.步骤3、对距离压缩后的回波信号进行距离徙动校正,得到校正后的回波信号s
rcmc
(tr,ta);
10.步骤4、将距离r(ta)对应的运动误差δr(ta)分解为目标舰船的振荡运动分量δr
st
(ta)和接收舰船的振荡运动分量δr
sr
(ta);通过惯导数据得到δr
sr
(ta),通过差分进化算法估计得到δr
st
(ta)进而得到位置运动误差δr(ta);
11.然后对回波信号s
rcmc
(tr,ta)进行运动补偿:先将s
rcmc
(tr,ta)在距离频域乘以h
mc1
(fr,ta)来补偿δr(ta)导致的包络移动;针对补偿后的信号再乘以相位补偿函数h
mc2
(ta);进行第二步补偿;
[0012][0013][0014]
其中,j表示虚数;c表示光速;fr为快时间tr经过傅里叶变换后对应的距离频域;λ为雷达工作波长;
[0015]
进而得到经过运动补偿后的回波信号;
[0016]
步骤5、针对经过运动补偿后的回波信号,根据从回波信号估计出的多普勒参数进行方位压缩,得到目标的距离和方位信息,实现对舰船目标的探测。
[0017]
进一步地,其特征在于,所述距离方程为
[0018][0019]
为无振荡运动误差时目标到发射机的距离,为无振荡运动误差时目标到接收舰船的距离;
[0020]
其中,ta表示舰船运动对应的慢时间,r
tc
表示ta=0时刻发射机和目标舰船的距离,r
rc
表示ta=0时刻接收舰船和目标舰船的距离,vr为接收舰船的运动速度,v
t
为目标舰船的运动速度,为其相对于接收舰船运动速度的夹角,α
t
为目标相对于发射机的方位角,β为目标相对于接收舰船的方位角;u
1r
(ta)、u
2r
(ta)为接收舰船的纵荡、横荡运动,u
1t
(ta)、u
2t
(ta)为目标舰船的纵荡、横荡运动,为正弦运动。
[0021]
进一步地,接收舰船纵荡、横荡运动如下:
[0022][0023]
其中,a
1r
、a
2r
为各自对应的幅值,ω
1r
、ω
2r
为各自对应的角频率,δφ
1r
、δφ
2r
为各自对应的初相位;
[0024]
目标舰船的纵荡、横荡运动如下:
[0025][0026]
其中,a
1t
、a
2t
为各自对应的幅值,ω
1t
、ω
2t
为各自对应的角频率,δφ
1t
、δφ
2t
为各自对应的初相位。
[0027]
进一步地,距离方程r(ta)中,除了和以外的项均属于舰船受海浪影响下产生振荡运动而导致的额外距离项δr(ta),即运动误差;δr(ta)如下:
[0028][0029]
其中,δr
st
(ta)=-u
1t
(ta)[sinα
t
+sinβ]-u
2t
(ta)[cosα
t
+cosβ]为目标舰船的振荡运动分量,δr
sr
(ta)=u
1r
(ta)sinβ+u
2r
(ta)cosβ为接收舰船的振荡运动分量。
[0030]
进一步地,考虑舰船振荡运动情况下目标舰船的回波信号多普勒频率为
[0031][0032]
其中,u
′
1t
(ta)为u
1t
(ta)的一阶导数,u
″
1t
(ta)为u
1t
(ta)的二阶导数,其余导数变量表示相同;为未考虑舰船振荡运动情况下目标舰船的回波信号多普勒频率。
[0033]
进一步地,在距离快时间-方位慢时间域(tr,ta)内的舰载平台接收的目标舰船回波信号sr(tr,ta)如下
[0034][0035]
式中,a0为任意复常量;wr(tr)为距离窗函数,采用矩形窗;wa(ta)为方位窗函数,采用矩形窗;λ为雷达工作波长;c表示光速;kr为信号调频率;tr为快时间;ta为慢时间;j表示虚数。
[0036]
进一步地,距离匹配函数h1(tr)=wr(tr)exp{-jπkrt
r2
}。
[0037]
进一步地,步骤3中对距离压缩后的回波信号进行距离徙动校正时,在距离频域乘一相位项即得到校正后的回波信号s
rcmc
(tr,ta)。
[0038]
进一步地,通过差分进化算法估计得到δr
st
(ta)的过程包括以下步骤:
[0039]
步骤4.1、首先分析目标舰船回波信号的wigner-ville分布,通过radon变换得到多普勒中心频率和调频率;
[0040]
步骤4.2、采用差分进化算法来进行估计,根据步骤4.1中估计出的多普勒中心频率和调频率,构建出目标理想的方位聚焦峰值响应aml
ideal
=sinc(bata),其中ba=kat
ac
为回波信号的多普勒带宽,t
ac
为积累时间,sinc(
·
)为辛格函数;
[0041]
将适应度函数选取为f=pf
·
(aml-aml
ideal
)2,其中aml为实际的方位聚焦峰值响应,pf为惩罚函数;
[0042]
设置每个个体的基因维度为6,分别对应于目标舰船的横荡和纵荡运动的幅度、周期和相位;采用差分进化算法得到使适应度值最小的个体即为最优个体,进而根据个体基因中对应的信息估计出目标舰船的振荡运动分量δr
st
(ta)。
[0043]
进一步地,根据从回波信号估计出的多普勒参数进行方位压缩时,将经过运动补偿后回波信号在多普勒频域乘以方位压缩匹配函数h2(fa)
[0044][0045]
其中,fa为多普勒频域,f
ac
为多普勒中心频率,ka为多普勒调频率,这些参数通过wigner-ville分布和radon变换来估计得到。
[0046]
本发明的有益效果为:针对舰载hfswr场景下采用合成孔径处理方法存在因舰船的六自由度运动导致的方位散焦问题,本发明提出一种基于差分进化算法的目标舰船振荡参数估计方法,该方法能够有效估计出非合作目标舰船的振荡参数,从而实现对回波信号运动补偿,可以很好地解决因舰船的六自由度运动导致的方位散焦问题,有效提升了舰载hfswr场景下采用合成孔径处理方法的目标方位探测性能。
附图说明
[0047]
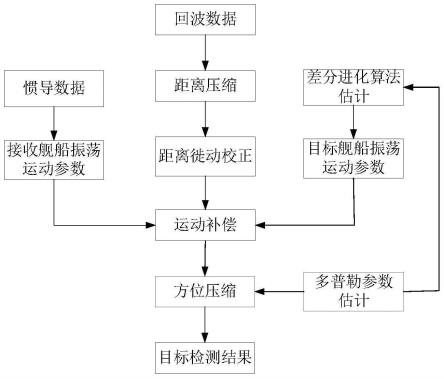
图1是本发明的一种基于差分进化的舰载高频地波雷达运动补偿方法流程示意图。
[0048]
图2是差分进化算法流程图。
[0049]
图3是发射机、接收舰船和目标舰船几何位置关系的示意图。
[0050]
图4(a)是在三级海态下对回波信号不进行运动补偿和用本发明方法进行运动补偿的目标方位剖面图比较;图4(b)是在五级海态下对回波信号不进行运动补偿和用本发明方法进行运动补偿的目标方位剖面图比较。
[0051]
图5(a)是在五级海态下且回波信号信噪比为0db时不进行运动补偿和用本发明方法进行运动补偿的目标方位剖面图比较;图5(b)是在五级海态下且回波信号信噪比为-5db时不进行运动补偿和用本发明方法进行运动补偿的目标方位剖面图比较;图5(c)是在五级海态下且回波信号信噪比为-10db时不进行运动补偿和用本发明方法进行运动补偿的目标方位剖面图比较。
具体实施方式
[0052]
本发明在考虑目标舰船和接收舰船都存在六自由度运动的情况下,建立了岸-舰双基地高频地波雷达目标回波信号模型,提出了基于差分进化算法估计目标舰船振荡参数的运动补偿方法。在说明本发明之前,首先说明本发明体制下雷达的工作过程,有一岸基发射机向目标海域发射雷达信号,照射到目标舰船后电磁波沿海面绕射传播,附近的做匀速直线运动的接收舰船接收到回波信号后通过本发明方法实现对目标探测,本发明是在舰载hfswr背景下采用合成孔径信号处理方式,并对舰船的六自由度运动进行补偿,。
[0053]
具体实施方式一:结合图1说明本实施方式,
[0054]
本实施方式所述的一种岸-舰双基地高频地波雷达运动补偿方法,包括以下步骤:。
[0055]
步骤1、岸基发射机向目标海域发射雷达信号,照射到目标舰船后电磁波沿海面绕射传播,附近的做匀速直线运动的接收舰船接收到回波信号;
[0056]
在海浪作用下,舰船存在六自由度运动,可分为三维的振荡运动(纵荡、横荡和垂荡)和摇摆运动(横摇、纵摇和艏摇),振荡运动误差会直接产生三个维度位移,影响回波信号的多普勒参数,通常需要对其进行补偿。而摇摆运动需要对接收舰船和目标舰船分别讨论:
[0057]
对于接收舰船,其影响主要为导致天线波束指向的偏移以及天线到目标的距离变化,关于天线波束指向变化的问题,可以采用天线稳定平台,通过将天线放置在多轴稳定平台上来隔离角度摆动对天线波束的影响,而摇摆运动导致的目标到接收天线的距离变化可以通过惯导数据得到并对其补偿。
[0058]
对于目标舰船受摇摆运动的影响,由于舰载hfswr的分辨率较差,通常船目标在这种体制的雷达上会显示为一个点目标,假设该点目标为目标舰船的中心位置是合理的,舰船中心位置在摇摆运动作用下并不会发生位置上的变化。因此,本发明主要考虑振荡运动误差对舰载hfswr的影响。
[0059]
考虑舰船在振荡运动作用下,建立岸基发射-舰载接收模式下高频地波雷达的距离方程r(ta),根据图3所示,距离方程的表达式为
[0060][0061]
其中,ta表示舰船运动对应的慢时间,r
tc
表示ta=0时刻发射机和目标舰船的距离,r
rc
表示ta=0时刻接收舰船和目标舰船的距离,vr为接收舰船的运动速度,v
t
为目标舰船的运动速度,为其相对于接收舰船运动速度的夹角,α
t
为目标相对于发射机的方位角,β为目标相对于接收舰船的方位角;u
1r
(ta)、u
2r
(ta)、u
3r
(ta)为接收舰船的纵荡、横荡和垂荡运动,u
1t
(ta)、u
2t
(ta)、u
3t
(ta)为目标舰船的纵荡、横荡和垂荡运动,假设其为正弦运动,具体表达式如下:
[0062][0063]
其中,ai′j′
、ωi′j′
、δφi′j′
分别为各自对应的幅值、角频率、初相位,i
′
=1,2,3,j
′
=r,t;
[0064]
关于垂荡运动的影响,考虑垂荡运动和忽略垂荡运动前后所引起的相位差远小于π/4,因此可以忽略距离方程中的垂荡分量u
3r
(ta)和u
3t
(ta)。对距离方程作二项式展开,并忽略高次项,则距离方程为
[0065][0066]
其中,为无振荡运动误差时目标到发射机的距离,为无振荡运动误差时目标到接收舰船的距离。
[0067]
距离表达式中,除了和以外的项均属于舰船受海浪影响下产生振荡运动而导致的额外距离项δr(ta),即运动误差,对δr(ta)做以下分解
[0068][0069]
其中,δr
st
(ta)=-u
1t
(ta)[sinα
t
+sinβ]-u
2t
(ta)[cosα
t
+cosβ]为目标舰船的振荡运动分量,δr
sr
(ta)=u
1r
(ta)sinβ+u
2r
(ta)cosβ为接收舰船的振荡运动分量。
[0070]
假设未考虑舰船振荡运动情况下目标舰船的回波信号多普勒频率为则引入振荡运动后的多普勒频率为
[0071][0072]
其中,u1′
t
(ta)为u
1t
(ta)的一阶导数,u1″
t
(ta)为u
1t
(ta)的二阶导数,其余导数变量的定义同上。
[0073]
可见,在本发明假设条件下,目标舰船回波信号的多普勒谱除了线性调制外,还存在着因目标舰船和接收舰船六自由度运动所导致的正弦调制。
[0074]
舰载平台接收到的目标舰船回波信号sr(tr,ta)在距离快时间-方位慢时间域(tr,ta)可表示为
[0075][0076]
式中,a0为任意复常量;wr(tr)为距离窗函数,采用矩形窗;wa(ta)为方位窗函数,采用矩形窗;λ为雷达工作波长;c表示光速;kr为信号调频率;tr为快时间;ta为慢时间;j表示虚数。
[0077]
步骤2、对公式(6)所示的回波信号进行距离压缩处理,距离匹配函数h1(tr)为
[0078]
h1(tr)=wr(tr)exp{-jπkrt
r2
}
ꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0079]
将h1(tr)与回波信号在频域相乘即实现距离压缩:
[0080]
[0081]
其中,fr为快时间tr经过傅里叶变换后对应的距离频域,表示对tr进行傅里叶变换,表示对fr进行逆傅里叶变换。
[0082]
步骤3、对步骤2处理后的回波信号s
rc
(tr,ta)进行距离徙动校正,具体为在距离频域乘一相位项得到校正后的回波信号s
rcmc
(tr,ta)。
[0083]
步骤4、对步骤3处理后的回波信号s
rcmc
(tr,ta)进行运动补偿,具体为对舰船的振荡运动δr(ta)进行补偿,可分解为目标舰船的振荡运动分量δr
st
(ta)和接收舰船的振荡运动分量δr
sr
(ta),其中δr
sr
(ta)可通过惯导数据得到,对于非合作目标,其δr
st
(ta)无法实现获得,本发明通过差分进化算法估计得到,具体为:
[0084]
步骤4.1、上述分析中提到,在舰船存在六自由度运动情况下,回波信号的多普勒域存在着线性调制和4个正弦波调制,需要从其中估计出线性调制的中心频率和调频率,本发明采用wigner-ville分布结合radon变换得到,首先分析目标舰船回波信号的wigner-ville分布,影响wigner-ville分布的主要为频率信息,推导过程暂时忽略正弦波调制的幅度和相位,目标舰船回波信号的相位特征可简化表示为
[0085][0086]
其中,f
ac
为多普勒中心频率;ka为多普勒调频率;fi(i=1~4)对应于正弦波调制的频率,具体对应目标舰船的横荡和纵荡、接收舰船的横荡和纵荡的正弦波频率,其频率分别为f1、f2、f3、f4。
[0087]
则其wigner-ville分布为
[0088][0089]
其中,ni(i=1~4)为整数,为ni阶贝塞尔函数,δ(f)为冲激函数。
[0090]
可见其wigner-ville分布为以f(ta)=f
ac
+kata为中心,频差为的多条直线,且f(ta)=f
ac
+kata的幅值最大即具有最强的能量。根据这一特性,可通过radon变换得到多普勒中心频率和调频率。
[0091]
步骤4.2、基于目标理想方位主瓣拟合的非合作目标运动误差估计。针对非合作目标的振荡运动参数未知的问题,本发明采用差分进化算法来进行估计,根据步骤4.1中估计出的多普勒中心频率和调频率,构建出目标理想的方位聚焦峰值响应aml
ideal
=sinc(bata),其中ba=kat
ac
为回波信号的多普勒带宽,t
ac
为积累时间,sinc(
·
)为辛格函数。
[0092]
将适应度函数选取为f=pf
·
(aml-aml
ideal
)2,其中aml为实际的方位聚焦峰值响应,pf为惩罚函数,在峰值响应越大处权值越大,其权值分布同sinc函数,幅值低于-40db其
惩罚函数大小置为0。需要注意的是,估计的多普勒中心频率存在一定的估计误差,但相对误差不会超过3%,需要在每次计算适应度之前,将理想的方位峰值聚焦响应、惩罚函数和当前方位压缩输出按照主瓣峰值位置进行包络对齐。参照图2的处理流程,采用差分进化算法,设定每一代种群个体数量为60,每个个体的基因维度为6,分别对应于目标舰船的横荡和纵荡运动的幅度、周期和相位,经过300次迭代后种群内使适应度值最小的个体即为最优个体,进而根据个体基因中对应的信息估计出目标舰船的振荡运动分量δr
st
(ta)。
[0093]
得到位置运动误差δr(ta)后,分两步进行补偿,第一步补偿为对步骤3处理后的信号s
rcmc
(tr,ta)在距离频域乘以h
mc1
(fr,ta)来补偿δr(ta)导致的包络移动,
[0094][0095]
第二步补偿为对第一步补偿后的信号乘以相位补偿函数h
mc2
(ta),其表达式为
[0096][0097]
经过运动补偿后,则回波信号相位中的距离项由公式(1)的形式变为
[0098][0099]
这样步骤5中的方位压缩匹配函数就能完全匹配,解决了舰船振荡运动导致合成孔径处理后的方位散焦问题。
[0100]
步骤5、对步骤4处理后的回波信号进行方位脉冲压缩,在多普勒频域乘以方位压缩匹配函数h2(fa)
[0101][0102]
其中,fa为多普勒频域,f
ac
为多普勒中心频率,ka为多普勒调频率,这些参数通过wigner-ville分布和radon变换来估计得到。
[0103]
至此,对舰载hfswr回波信号进行合成孔径处理和运动补偿的处理基本完成。
[0104]
实施例
[0105]
本发明主要采用仿真实验的方法进行验证该方案的可行性,参照前述的具体实施步骤进行仿真实验,仿真参数如表1、表2所示,表1为舰载hfswr系统几何参数,表2为舰载平台的几何参数
[0106]
表1
[0107][0108]
表2
[0109][0110]
分别比较不进行运动补偿和采用本发明方法进行运动补偿的结果,图4(a)是在三级海态下对回波信号不进行运动补偿和用本发明方法进行运动补偿的目标方位剖面图比较,图4(b)是在三级海态下对回波信号不进行运动补偿和用本发明方法进行运动补偿的目标方位剖面图比较,表3是在目标舰船在三级海态下的纵荡、横荡参数理论值和本发明方法的估计值,表4是在目标舰船在五级海态下的纵荡、横荡参数理论值和本发明方法的估计值,可以看出,本发明方法可以有效估计出目标舰船的振荡参数,通过本发明方法运动补偿后,解决了合成孔径处理过程中的目标方位散焦问题。
[0111]
表3
[0112][0113]
表4
[0114][0115]
为了验证本发明方法的可靠性,假设在五级海态、高斯白噪声背景下,分别考虑信噪比为0db、-5db、-10db时采用本发明方法的有效性,图5(a)是回波信号信噪比为0db时不进行运动补偿和用本发明方法进行运动补偿的目标方位剖面图对比,图5(b)是回波信号信噪比为-5db时不进行运动补偿和用本发明方法进行运动补偿的目标方位剖面图对比,图5(c)是回波信号信噪比为-10db时不进行运动补偿和用本发明方法进行运动补偿的目标方位剖面图对比。从仿真结果可以看出,该方法在信噪比大于-10db时能够有效估计出目标舰船的振荡误差,并对回波信号进行运动补偿。
[0116]
综上所述,仿真实验验证了本发明的正确性,有效性和可靠性。
[0117]
本发明还可有其它多种实施例,在不背离本发明精神及其实质的情况下,本领域技术人员当可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明所附的权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1