外参标定方法、设备以及系统与流程
本技术涉及智能车辆,尤其涉及一种外参标定方法、设备以及系统。
背景技术:
1、目前,常通过车辆中部署的多种传感器对车辆周围的目标对象进行探测,并通过标定的外参对不同传感器的探测数据进行数据融合,以得到丰富的探测数据,增强车辆视觉的感知能力。在外参标定的过程中,需要将标定板手动搬移以实现对不同位置上标定板的探测。然而,手动移动标定板导致标定效率较低,并且存在由于移动位置不够准确导致标定精度低,移动区域不够大导致外参的计算结果进入局部最优解的问题。
技术实现思路
1、本技术实施例提供的一种外参标定方法、设备以及系统,以期提高标定效率、精度,以及避免技术结果进入局部最优解的问题。
2、第一方面,本技术实施例提供一种外参标定方法,包括:向标定控制机构发送控制指令,该控制指令用于控制标定板依次移动至多个目标位置;在控制标定板依次移动至多个目标位置的过程中,接收该标定板上第一图像点的n个点对信息,n为大于或等于4的整数,该n个点对信息与该多个目标位置中的n个目标位置一一对应,该点对信息包括第一坐标信息和第二坐标信息,该第一坐标信息包括该标定板移动至对应的目标位置时,该第一图像点在第一设备的坐标系中的坐标,该第二坐标信息包括该标定板移动至对应的目标位置时,该第一图像点在第二设备的坐标系中的坐标;根据该n个点对信息,确定该第一设备和该第二设备之间的外参。
3、通过第一方面提供的外参标定方法,上位机通过标定控制机构控制标定板移动至多个目标位置,并在标定板移动至多个目标位置的过程中,获取标定板上第一图像点的n个点对信息,进而根据n个点对信息确定第一设备和第二设备之间的外参,实现了标定板的自动移动控制,提高了标定效率和标定精度。
4、在一种可能的实施方式中,该控制指令包括多个第一控制指令,该第一控制指令用于控制该标定板由当前所处的目标位置移动至下一目标位置,向标定板控制机构发送控制指令,包括:响应于触发事件,向该控制机构发送该第一控制指令;其中,该触发事件包括以下至少之一:接收到该标定板当前所处的目标位置对应的第一点对信息;接收到指示该标定板在当前所处的目标位置标定失败的信息;到达周期性触发时机。
5、通过该实施方式提供的外参标定方法,上位机基于对触发事件的响应,控制标定板移动至下一目标位置,实现了对标定板位置的实时确定,以及对标定板的自动控制,提高了标定效率。
6、在一种可能的实施方式中,该响应于触发事件,向该控制机构发送该第一控制指令,包括:在已接收的点对信息的数量小于第一预设值m时,响应于该触发事件,控制该标定板由当前所处的目标位置移动至下一目标位置,m为大于或等于n的整数。
7、可选的,该方法还包括:在已接收的点对信息的数量大于或等于第一预设值m时,结束控制该标定板移动的过程,m为大于或等于n的整数。
8、通过该实施方式提供的外参标定方法,在控制标定板移动至下一目标位置之前,先对确定是否已经接收到足够的点对信息,避免获取过多的点对信息,而导致计算资源消耗较大的问题。
9、在一种可能的实施方式中,该控制指令携带有该多个目标位置的坐标。
10、通过该实施方式提供的外参标定方法,上位机向标定控制机构指示多个目标位置的坐标,以便于标定控制机构将标定板准确移动至该多个目标位置。
11、在一种可能的实施方式中,该控制指令携带有移动规则,该移动规则包括步长和/或移动方向,且该移动规则用于控制该标定板依次移动至该多个目标位置。
12、通过该实施方式提供的外参标定方法,上位机向标定控制机构指示移动规则,以便于标定控制机构按照指示的移动规则进行移动,在所需移动的目标位置较多的情况下,可以降低信令开销。
13、在一种可能的实施方式中,该控制指令包括多个第一控制指令,该第一控制指令用于控制该标定板由当前所处的目标位置移动至下一目标位置,且该第一控制指令携带的下一目标位置的坐标,为基于该标定板当前所处的目标位置对应的第一点对信息确定的。
14、通过该实施方式提供的外参标定方法,基于当前目标位置对应的第一点对信息确定标定板的下一目标位置,使得标定板所移动的目标位置更灵活,更符合外参标定的需求,进而提高外参标定的准确度。
15、在一种可能的实施方式中,该第一设备和该第二设备均部署于第一车辆,该多个目标位置均位于该第一车辆的探测区域;该多个目标位置分布于l个探测平面,l为正整数,该l个探测平面均垂直于地平面,且该l个探测平面相互平行;针对该l个探测平面中的每个探测平面,该探测平面中的多个目标位置具有不同的高度。
16、通过该实施方式提供的外参标定方法,分布于l个探测平面的多个目标位置,丰富了外参标定的标定区域,避免标定的外参进入局部最优解。
17、在一种可能的实施方式中,当l为大于1的整数时,在垂直该l个探测平面的方向上,该l个探测平面之间依次间隔第二预设值。
18、通过该实施方式提供的外参标定方法,l个探测平面之间间隔一定距离,使得多个目标位置更丰富,以提高外参标定的准确度。
19、在一种可能的实施方式中,根据该n个点对信息,确定该第一设备和该第二设备之间的外参,包括:根据该n个点对信息,确定q个标定组,该q个标定组均包括n个点对信息中的n个点对信息,n为确定该外参所需的点对信息数量,且该q个标定组之间各不相同;针对该q个标定组中的每个标定组,确定该标定组对应的备选外参;若q=1,则将该备选外参作为该第一设备和该第二设备之间的外参;或者,若q>1,则根据q个验证组分别对该q个标定组对应的备选外参的标定准确度进行验证,再将该q个标定组对应的备选外参中标定准确度最高的备选外参确定为该外参,该q个验证组与该q个标定组一一对应,且一个验证组中的n-n个点对信息与对应的一个标定组中的n个点对信息组成该n个点对信息。
20、通过该实施方式提供的外参标定方法,基于验证组对基于各标定组计算得到备选外参进行验证,以得到准确度最高的备选外参,并将该备选外参作为第一设备和第二设备之间的外参,提高了外参标定的准确度。
21、在一种可能的实施方式中,该根据q个验证组分别对该q个标定组对应的备选外参的标定准确度进行验证,包括:针对该q个验证组中的每个验证组,根据该验证组中的n-n个点对信息和该备选外参,得到n-n个初始标定准确度,并根据该n-n个初始标定准确度,确定该备选外参的标定准确度。
22、通过该实施方式提供的外参标定方法,基于一个验证组中的多个点对信息对备选外参进行验证时,上位机可以基于各点对信息确定初始标定准确度,确定备选外参最终的标定准确度,使得备选外参的标定准确度更加可靠。
23、在一种可能的实施方式中,该根据该验证组中的n-n个点对信息和该备选外参,得到n-n个初始标定准确度,包括:针对该n-n个点对信息中的每个点对信息,根据该点对信息中的第一坐标信息和该备选外参,确定第三坐标信息;根据该第三坐标信息和该点对信息中的第二坐标信息之间的坐标偏差,确定该初始标定准确度。
24、通过该实施方式提供的外参标定方法,实现了对初始标定准确度的识别。
25、可选的,该接收该标定板上第一图像点的n个点对信息,包括:接收第一车辆的控制装置发送的该n个点对信息,该第一车辆的控制装置与该第一设备和该第二设备连接。
26、在一种可能的实施方式中,该标定板的形状为圆形,该第一图像点为该标定板的圆心。
27、通过该实施方式提供的外参标定方法,标定板的形状为圆形时,更容易拟合出第一图像点,也即圆心的点对信息。
28、第二方面,本技术实施例提供一种外参标定方法,包括:响应于周期性触发时机或控制指令,控制标定板依次移动至多个目标位置。
29、在一种可能的实施方式中,该方法还包括:接收上位机发送的该控制指令。
30、在一种可能的实施方式中,该控制标定板依次移动至多个目标位置,包括:根据移动规则,控制该标定板依次移动至该多个目标位置;其中,该移动规则包括步长和/或移动方向。
31、在一种可能的实施方式中,该控制指令携带有该移动规则。
32、在一种可能的实施方式中,该控制标定板依次移动至多个目标位置,包括:根据该多个目标位置的坐标,控制该标定板依次移动至该多个目标位置。
33、在一种可能的实施方式中,该控制指令携带有该多个目标位置的坐标。
34、在一种可能的实施方式中,该控制指令包括多个第一控制指令,该第一控制指令携带的下一目标位置的坐标,该控制标定板依次移动至多个目标位置,包括:针对该多个第一控制指令中的一个第一控制指令,控制该标定板由当前所处的目标位置移动至下一目标位置。
35、在一种可能的实施方式中,该控制标定板依次移动至多个目标位置,包括:控制标定控制机构在水平方向和/或垂直方向上,将该标定板移动至该多个目标位置。
36、在一种可能的实施方式中,该第一设备和该第二设备均部署于第一车辆,该多个目标位置均位于该第一车辆的探测区域;该多个目标位置分布于l个探测平面,l为正整数,该l个探测平面相互平行,且该l个探测平面均垂直于地平面;针对该l个探测平面中的每个探测平面,该探测平面中的多个目标位置具有不同的高度。
37、在一种可能的实施方式中,当l为大于1的整数时,在垂直该l个探测平面的方向上,该l个探测平面之间间隔第二预设值。
38、上述第二方面以及上述第二方面的各可能的实施方式所提供的外参标定方法,其有益效果可以参见上述第一方面以及第一方面的各可能的实施方式所带来的有益效果,在此处不再赘述。
39、第三方面,本技术实施例提供一种外参标定方法,包括:当标定板移动至目标位置时,获取第一设备对标定板进行探测得到的第一探测数据,以及,第二设备对该标定板进行探测得到的第二探测数据;根据该第一探测数据和该第二探测数据,确定该标定板上第一图像点的点对信息,该点对信息包括第一坐标信息和第二坐标信息,该第一坐标信息包括该标定板移动至该目标位置时,该第一图像点在该第一设备的坐标系中的坐标,该第二坐标信息包括该标定板移动至该目标位置时,该第一图像点在该第二设备的坐标系中的坐标,且该点对信息用于确定该第一设备和该第二设备之间的外参;发送该点对信息。
40、在一种可能的实施方式中,该根据该第一探测数据和该第二探测数据,确定该标定板上第一图像点的点对信息,包括:该第一探测数据反映的标定板图形和该第二探测数据反映的标定板图形,分别与该标定板之间的图形偏差均小于预设偏差,则根据该第一探测数据确定该第一坐标信息,并根据该第二探测数据确定该第二坐标信息,再将该第一坐标信息和该第二坐标信息作为该点对信息。
41、在一种可能的实施方式中,该标定板的形状为圆形,该第一图像点为该标定板的圆心。
42、上述第三方面以及上述第三方面的各可能的实施方式所提供的外参标定方法,其有益效果可以参见上述第一方面以及第一方面的各可能的实施方式所带来的有益效果,在此处不再赘述。
43、第四方面,本技术实施例提供一种上位机,包括:处理器和存储器,该存储器用于存储计算机程序,该处理器用于调用并运行该存储器中存储的计算机程序,执行上述第一方面以及各实施方式中的方法。
44、上述第四方面以及上述第四方面的各可能的实施方式所提供的上位机,其有益效果可以参见上述第一方面以及第一方面的各可能的实施方式所带来的有益效果,在此处不再赘述。
45、第五方面,本技术实施例提供一种标定控制机构,包括:处理器和存储器,该存储器用于存储计算机程序,该处理器用于调用并运行该存储器中存储的计算机程序,执行上述第二方面以及各实施方式中的方法。
46、上述第五方面以及上述第五方面的各可能的实施方式所提供的标定控制机构,其有益效果可以参见上述第一方面以及第一方面的各可能的实施方式所带来的有益效果,在此处不再赘述。
47、第六方面,本技术实施例提供一种控制装置,包括:处理器和存储器,该存储器用于存储计算机程序,该处理器用于调用并运行该存储器中存储的计算机程序,执行上述第三方面以及各实施方式中的方法。
48、上述第六方面以及上述第六方面的各可能的实施方式所提供的控制装置,其有益效果可以参见上述第一方面以及第一方面的各可能的实施方式所带来的有益效果,在此处不再赘述。
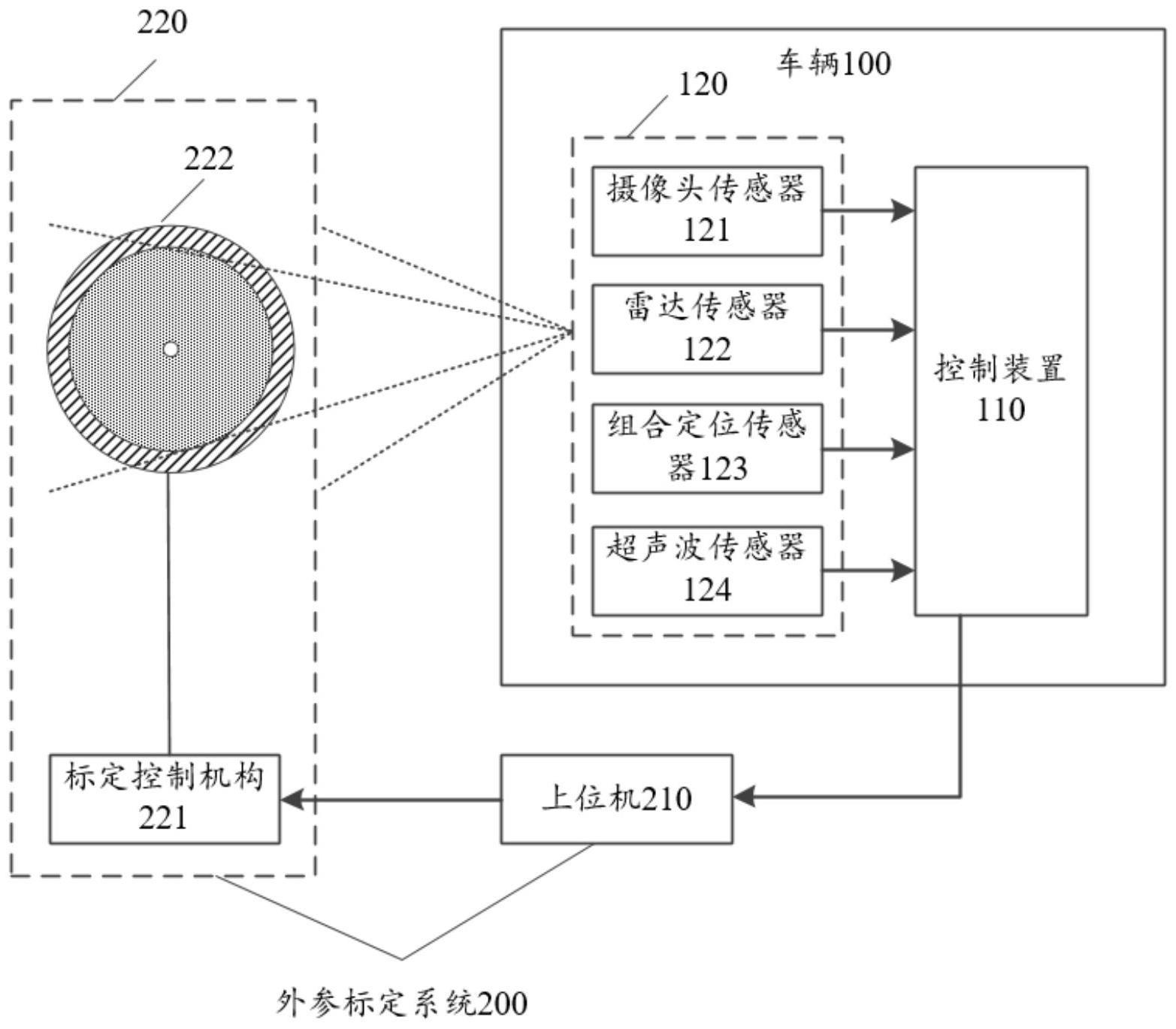
49、第七方面,本技术实施例提供一种外参标定系统,包括:如上述第四方面中的上位机和标定控制设备,该标定控制设备包括上述第五方面中的标定控制机构。
50、在一种可能的实施方式中,该标定控制设备还包括标定板;该标定控制机构包括可移动装置和连接装置,该连接装置的一端固定于该可移动装置,该连接装置的另一端固定有该标定板;该可移动装置用于控制该标定板在水平方向上移动。
51、在一种可能的实施方式中,该可移动装置包括地面移动装置或飞行装置。
52、在一种可能的实施方式中,该连接装置为可升降装置;该可升降装置用于控制该标定板在垂直方向上移动。
53、第八方面,本技术实施例提供一种标定控制设备,包括:如上述第五方面中的标定控制机构和标定板,该标定控制机构包括可移动装置和连接装置,该连接装置的一端固定于该可移动装置,该连接装置的另一端固定有该标定板;该可移动装置用于控制该标定板在水平方向上移动。
54、在一种可能的实施方式中,该可移动装置包括地面移动装置或飞行装置。
55、在一种可能的实施方式中,该连接装置为可升降装置;该可升降装置用于控制该标定板在垂直方向上移动。
56、第九方面,本技术实施例提供一种芯片,包括:处理器,用于从存储器中调用并运行计算机指令,使得安装有该芯片的设备执行如第一方面、第二方面、第三方面或各可能的实现方式中的方法。
57、第十方面,本技术实施例提供一种计算机可读存储介质,用于存储计算机程序指令,该计算机程序使得计算机执行如第一方面、第二方面、第三方面或各可能的实现方式中的方法。
58、第十一方面,本技术实施例提供一种计算机程序产品,包括计算机程序指令,该计算机程序指令使得计算机执行如第一方面、第二方面、第三方面或各可能的实现方式中的方法。
59、第十二方面,本技术实施例提供一种装置,包括逻辑电路和输入输出接口,其中,该输入输出接口用于接收来自该装置之外的其他通信装置的信号并传输至该逻辑电路或将来自该逻辑电路的信号发送给该装置之外的其他通信装置,该逻辑电路用于执行代码指令以实现如第一方面、第二方面、第三方面或各可能的实现方式中的方法。
- 还没有人留言评论。精彩留言会获得点赞!