一种基于频率分集阵列的高分宽幅SAR成像方法
一种基于频率分集阵列的高分宽幅sar成像方法
技术领域
1.本发明属于雷达成像领域,具体涉及一种基于频率分集阵列的高分宽幅sar成像方法。
背景技术:
2.合成孔径雷达(sar)被提出以来,经过几十年的发展,sar逐渐从低分辨、窄测绘带进步向高分辨、宽测绘带(hrws)的工作模式。且伴随军事、民用领域需求的提高,要求 sar系统不仅可以实现对于静止场景的重构,还要求对于场景中的运动目标进行检测与成像(gmti),并正确定位到背景图像中,因此,hrws成像和高性能gmti方法已成为 sar的研究热点之一。然而,高分辨率成像和宽测绘带成像对系统的脉冲重复频率(prf) 提出了截然相反的要求,对于传统单天线sar而言,受到最小天线尺寸的限制,无法选择一个合适的prf同时解决距离模糊与多普勒模糊问题。为了解决方位高分辨率与宽测绘带的矛盾,现有的阵列多通道配置技术利用其空域自由度结合低脉冲重复频率可以在有效避免距离模糊的同时,抑制掉方位模糊,然而此时阵列波束得到合成,无额外自由度对回波进行杂波抑制,提高目标的检测性能,导致动目标通常淹没在杂波背景中,无法满足 hrws-gmti的信杂比要求。因此设计新体制的合成孔径雷达系统在有效的实现宽幅静止场景成像的同时,实现对于场景中运动目标的检测与成像是目前亟待探索的方向。
技术实现要素:
3.本发明为了解决上述已有技术矛盾,在方位向高分辨率成像模式下大幅提高测绘宽度的同时,实现对于动目标的检测与成像,进而提供一种基于频率分集阵列的高分宽幅sar 成像方法;
4.一种基于频率分集阵列的高分宽幅sar成像方法,其特征在于:所述方法是通过以下步骤实现的:
5.步骤一:设计频率分集阵列的频率增量δf;
6.步骤二:频率分集阵列发射信号集{sn(t)}
n=1,...,n
,其中sn(t)为第n个天线的发射信号, sn(t)=xn(t)sin{2π(f0+(n-1)δf)t},xn(t)为信号包络,n=1,...,n,n为发射天线数,f0为参考天线载频,即第一个天线的载频;
7.步骤三:频率分集阵列接收回波信号,并对该回波信号依次进行矢量化输出,得到接收回波信号的快拍矢量yh(k),其中h=1,...,h,k=1,...,k,h为距离门个数,k为脉冲个数;
8.步骤四:对回波信号的快拍矢量yh(k)进行距离解模糊,得到两条无距离模糊的回波信号支路;
9.步骤五:利用步骤四中所得的第一条支路进行静止场景的重构;
10.步骤六:利用步骤四中所得的第二条支路进行场景中运动目标的检测、成像与重定位;
11.步骤七:将静止场景重构结果与动目标叠重定位结果叠加得到最终成像效果;
12.本发明与现有技术相比具有以下有益效果:
13.本发明提供一种基于频率分集阵列的高分宽幅sar成像方法,通过对称十字频率分集阵列发射正交波形信号,通过对接收回波信号的矢量化,通过补偿回波信号的距离依赖特性和俯仰维发射波束形成实现距离解模糊,将解模糊后的回波分为两条支路处理,一条支路经过接收波束形成结合传统sar成像算法实现对于宽幅静止场景的重构;另一条支路利用方位维自由度结合空时自适应处理技术抑制杂波,得到动目标的成像结果。最终将两条支路的成像结果叠加在一起,便得到了对于宽幅静止场景与运动目标的综合成像结果;
14.其中利用频率分集阵列的发射导向矢量的距离和角度二维依赖性,能够在空间频率域有效区分距离模糊的回波信号,通过发射波束形成在空间频率域滤波,实现对回波信号的距离解模糊,从而得到无距离模糊的成像结果;
15.通过设计频率分集阵列的频率增量δf,能够改善回波信号在空间频率域的频谱结构,从而简化发射波束形器的设计,降低系统信号处理复杂度;
16.本发明相较于传统多通道宽幅成像系统,对称十字fda体制下,不仅可以利用回波的距离依赖性解决距离模糊问题,还可以利用俯仰维提供的额外距离自由度解决距离模糊问题,还可以利用方位维的自由度实现静止杂波的抑制,从而实现对于场景中动目标的检测与成像。
附图说明
17.图1是本发明使用的实际天线阵列结构;
18.图2是本发明使用的等效天线阵列结构;
19.图3是本发明的实现流程图;
20.图4是距离多普勒算法对距离模糊回波信号的成像结果图(纵向坐标为方位单元,横向坐标为距离单元);
21.图5是本发明方法对距离模糊回波信号的成像结果图(纵向坐标为方位单元,横向坐标为距离单元);
22.图6是本发明方法对距离模糊回波信号进行杂波抑制后的结果图(纵向坐标为方位单元,横向坐标为距离单元);
23.图7是本发明方法对杂波抑制后的动目标回波进行精聚焦的成像结果图(纵向坐标为方位单元,横向坐标为距离单元);
24.图8是将静止场景与动目标叠加在同一张图中的成像结果图(纵向坐标为方位单元,横向坐标为距离单元)。
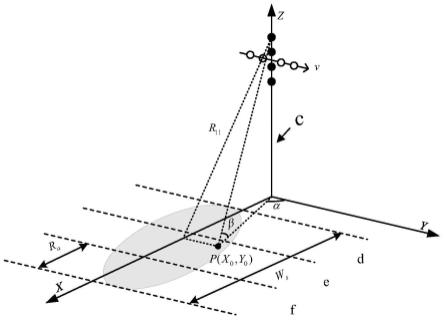
25.图中:1发射阵列、2接收阵列、c平台高度、d第一距离模糊区、e第二距离模糊区、 f第三距离模糊区和g动目标。
具体实施方式
26.具体实施方式一:参照图1至图8说明本实施方式,本实施方式提供一种基于频率分集阵列的高分宽幅sar成像方法,其特征在于:所述方法是通过以下步骤实现的:
27.步骤一:设计频率分集阵列的频率增量δf;
28.步骤二:频率分集阵列发射信号集{sn(t)}
n=1,...,n
,其中sn(t)为第n个天线的发射信号, sn(t)=xn(t)sin{2π(f0+(n-1)δf)t},xn(t)为信号包络,n=1,...,n,n为发射天线数,f0为参考天线载频,即第一个天线的载频;
29.步骤三:频率分集阵列接收回波信号,并对该回波信号依次进行矢量化输出,得到接收回波信号的快拍矢量yh(k),其中h=1,...,h,k=1,...,k,h为距离门个数,k为脉冲个数;
30.步骤四:对回波信号的快拍矢量yh(k)进行距离解模糊,得到两条无距离模糊的回波信号支路;
31.步骤五:利用步骤四中所得的第一条支路进行静止场景的重构;
32.步骤六:利用步骤四中所得的第二条支路进行场景中运动目标的检测、成像与重定位;
33.步骤七:将静止场景重构结果与动目标叠重定位结果叠加得到最终成像效果。
34.本实施方式中,步骤一所设计频率增量δf的设计对于优化系统的距离解模糊性能至关重要,所设计的频率增量δf能够使相邻距离模糊区域的信号在空间频率域fs∈[-0.5,0.5] 上的间距最大化,有利于在空间频率域区分距离模糊的回波信号,也能够简化后续分解滤波器的设计,降低信号处理复杂度;
[0035]
步骤二中频率分集阵列利用不同天线发射载频的微小差异,能够区分距离模糊的回波信号,这是因为回波信号的延时由距离与光速决定,而回波信号的相位由距离和波长决定,因此频率分集阵列利用多载频、多波长的优势造成距离模糊回波信号的相位差异,从而具有区分距离模糊回波信号的能力;
[0036]
步骤三可进一步进行细化;
[0037]
步骤三一:频率分集阵列的发射信号经过观测场景的后向散射,被接收阵列接收,得到接收回波信号;
[0038]
步骤三二:对接收回波信号进行匹配滤波,即对回波信号和各滤波器hn(t)=xn(t)进行时域相关操作,将所有滤波器在同一时刻的输出排成列矢量,得到接收回波信号的快拍矢量 yh(k),其中h=1,...,h,k=1,...,k,h为距离门个数,k为脉冲个数;此过程一方面能够获得距离向脉冲压缩的信号处理增益,另一方面能够分离发射信号,恢复发射自由度,为进一步利用发射自由度进行距离解模糊奠定基础;
[0039]
本技术所采用的对称十字fda结构(如图1a所示):沿俯仰维放置n个发射阵元,即不同行阵元的发射信号的频率是不同的,沿方位维放置n个接收阵元。发射与接收阵元之间的间距保持一致。得益于对称十字结构,可以保证各个方向成像性能的一致性。根据等效相位中心原理(pca),对称十字fda可以等效为(如图1b所示)收发共用平面阵列;图2是本技术的使用场景,采用高速运动的低轨卫星作为雷达平台,平台高度为h,运动速度为v。阵列平面平行于雷达运动方向,阵列发射信号的脉冲重复频率为fr,第n个发射天线的发射载频为fn。天线波束指向阵列正侧方的地面观测场景,观测场景的宽度即为测绘带宽,用ws表示。系统要求的方位分辨率为ρa,系统的最大无模糊距离ra=c/(2fr),当ws>ra时,测绘带内的观测场景产生距离模糊,距离模糊次数
[0040]
具体实施方式二:参照图1至图8说明本实施方式,本实施方式是对具体实施方式一所述的步骤一作进一步限定,本实施方式中所述步骤一中设计频率分集阵列的频率增量δf的具体步骤如下:
[0041]
步骤一一:根据平台速度v和方位分辨率ρa得到脉冲重复频率fr=1.2v/ρa,其中比例系数1.2为设计裕量;
[0042]
步骤一二:根据测绘带宽ws和脉冲重复频率fr,得到距离模糊次数其中表示向上取整,c为光速;
[0043]
步骤一三:根据脉冲重复频率fr和距离模糊次数na设计载频的频率增量:
[0044]
δf=(u+q)frꢀꢀꢀ
(1)
[0045]
其中u为整数部分,取b为发射信号带宽,表示向下取整,q为小数部分,q=1/na。其它组成及连接方式与具体实施方式一相同。
[0046]
具体实施方式三:参照图1至图8说明本实施方式,本实施方式是对具体实施方式二所述的步骤四作进一步限定,本实施方式中所述步骤四中对回波信号的快拍矢量yh(k)进行距离解模糊的具体步骤如下:
[0047]
步骤四一:进行距离依赖性补偿:
[0048]
由于频率分集阵列的发射导向矢量是距离的函数,因此快拍矢量yh(k)的空间频率随距离缓慢变化,为了防止不同距离模糊区域的回波信号在空间频率域互相混叠,需要进行距离依赖性补偿,选取第一模糊区域为参考区域,根据参考区域各距离门的斜距设计补偿函数:ch=[1 exp(j2πf
r,h
) ... exp(j2πf
r,h
(n-1))]
t
;
[0049]
其中rh为参考区域的第h个距离门的斜距,j为虚数标志,[
·
]
t
表示转置;
[0050]
用补偿函数ch对回波信号的快拍矢量yh(k)进行距离依赖特性补偿,得到补偿后回波信号的快拍矢量:其中为克劳内克积,
⊙
为哈达玛积,表示大小为m的全一向量;
[0051]
后续将无距离模糊的回波信号分为两条支路分别进行处理;
[0052]
步骤四二:发射波束形成:
[0053]
设计发射波束权值:w
p
=a(f
s,p
)
[0054]
其中a(f
s,p
)=[1 exp(-j2πf
s,p
)
ꢀ…ꢀ
exp(-j2πf
s,p
(n-1))]
t
为频率分集阵列的发射导向矢量,为第p距离模糊区域的空间频率,p=1,...,na,na为最大距离模糊次数,ra=c/(2fr)为最大无模糊距离,j表示虚数,d为相邻天线间距,λ=c/f0为波长,为发射波束指向;
[0055]
采用发射波束权值w
p
对补偿后的回波信号快拍矢量进行发射波束形成,即用权矢量w
p
对快拍矢量的各元素进行加权求和,得到无距离模糊的回波信号:
[0056]
[0057]
其中(
·
)h表示共轭转置,后续将无距离模糊的回波信号分为两条支路分别进行处理。其它组成及连接方式与具体实施方式二相同。
[0058]
具体实施方式四:参照图1至图8说明本实施方式,本实施方式是对具体实施方式三所述的步骤五作进一步限定,本实施方式中所述步骤五中利用步骤四中所得的第一条支路进行静止场景重构的具体步骤如下:
[0059]
步骤五一:首先对无距离模糊的回波信号进行接收波束形成以提高主瓣增益, 根据频率分集阵列的接收导向矢量以及接收波束指向得到接收波束形成器的输出信号y
h.p
(k)为:
[0060][0061]
其中为接收导向矢量;
[0062]
步骤五二:随后对接收波束形成后的回波进行传统的距离多普勒sar成像算法处理,得到整个静止观测场景的高分辨宽测绘带成像结果。
[0063]
其它组成及连接方式与具体实施方式三相同。
[0064]
具体实施方式五:参照图1至图8说明本实施方式,本实施方式是对具体实施方式一所述的步骤六作进一步限定,本实施方式中所述所述步骤六中利用步骤四中所得的第二条支路进行场景中运动目标的检测、成像与重定位的具体实施步骤如下:
[0065]
步骤六一:空时自适应处理进行杂波抑制,提高信杂比;
[0066]
步骤六二:动目标精聚焦;
[0067]
经杂波抑制后的目标分布在多个方位向采样单元,需要通过方位向脉冲压缩实现目标方位向聚焦成像,最大限度地增加目标增益,关于方位向匹配滤波器的设计,这里与运动目标参数完全匹配的滤波器参数,保证运动目标的聚焦成像和再定位,其表示式如下:
[0068][0069]
其中f
dc
=2vr/λ为目标运动所引起的多普勒频率,rb为雷达与目标之间的最近斜距,利用上述方位向匹配滤波器在每一个慢时间k对杂波抑制后回波进行滤波,va表示动目标的方位速度,即可得到动目标的精聚焦结果。其它组成及连接方式与具体实施方式四相同。
[0070]
具体实施方式六:参照图1至图8说明本实施方式,本实施方式是对具体实施方式五所述的步骤六一作进一步限定,本实施方式中所述步骤六一中空时自适应处理进行杂波抑制,提高信杂比的具体实施步骤如下:
[0071]
设距离徙动校正后,多通道的动目标、杂波混合回波信号表示为:
[0072]
则目标检测问题可以构造为以下假设检验:
[0073][0074]
s与c分别表示目标与杂波回波,n表示噪声;由于噪声与杂波统计独立,因此可估计得到某个距离门的杂波加噪声的协方差矩阵:
[0075][0076]
其中l表示满足h1假设的距离单元的序号,表示该距离单元的数据,l为选择的距离单元总数。因此,整体的杂波加噪声的协方差矩阵可表示为:
[0077][0078]
则基于最小方差无失真响应准则的滤波器求解问题可以表达为如下形式:
[0079][0080]
其中,w表示滤波器的系数,表示动目标的接收导向矢量;
[0081]
则得到的空时自适应滤波器的权矢量为:
[0082][0083]
则最终所获得的滤波器的输出为:
[0084][0085]
其它组成及连接方式与具体实施方式五相同。
[0086]
结合以上实施方式通过仿真实验对本发明的效果做进一步说明:
[0087]
仿真参数:
[0088]
频率分集阵列合成孔径雷达的参考载频f0=5.3ghz,频率增量δf=8750hz,收发阵列共用半波长等距线阵,阵元数n=4,雷达平台的运动速度v=7600m/s,平台高度 h=500km,脉冲重复频率fr=4000hz,系统带宽为100mhz,距离分辨率和方位分辨率均为1.5m,测绘带宽ws=150km,最大距离模糊次数na=4。
[0089]
仿真内容:
[0090]
仿真1,在上述仿真参数下,以第一距离模糊区域为期望成像区域,采用现有距离多普勒算法对距离模糊回波信号进行成像,结果如图4所示。
[0091]
仿真2,在上述仿真参数下,以第一距离模糊区域为期望成像区域,采用本发明方法对距离模糊回波信号进行成像,结果如图5所示。
[0092]
对比图4和图5可见,本发明方法能够通过距离解模糊,大大提高距离模糊回波信号的成像质量,能够实现对观测场景的高分辨宽测绘带成像。
[0093]
仿真3,在上述仿真参数下,以第一距离模糊区域为期望成像区域,采用本发明方法对距离模糊回波信号进行杂波抑制,结果如图6所示。
[0094]
仿真4,对于杂波抑制后的结果进行动目标精聚焦处理,结果如图7所示。
[0095]
仿真5,将静止场景成像结果与动目标成像结果归一化后取分贝处理,并将两个成像结果叠加在同一张图中,结果如图8所示。
[0096]
通过图6和图7可见,本发明方法能够对于解模糊后的动目标回波实现杂波抑制与精聚焦,最终能够实现对静止观测场景与场景中动目标的高分辨宽测绘带成像。
[0097]
本发明已以较佳实施案例揭示如上,然而并非用以限定本发明,任何熟悉本专业
的技术人员,在不脱离本发明技术方案范围内,当可以利用上述揭示的结构及技术内容做出些许的更动或修饰为等同变化的等效实施案例,但是凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施案例所做的任何简单修改、等同变化与修饰,均仍属本发明技术方案范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1