信号级协同多雷达组网搜索资源分配方法与流程
1.本发明属于雷达抗干扰技术领域,特别涉及信号级协同多雷达组网搜索资源分配方法。
背景技术:
2.随着新的作战对象和作战样式的不断出现,仅依靠单个雷达节点越来越难以满足新的探测需求,从发展历程来看,雷达组网探测先后经历了双/多基地雷达、雷达组网系统、mimo雷达、分布式相参雷达等多种形态。信号级协同雷达组网探测也是一种组网应用形态,介于信号级相参雷达组网探测与数据级融合雷达组网探测之间,是提高雷达抗有源干扰的一种有效手段,在实际应用中取得较好效果。与信号级相参雷达组网相比,其不需要各雷达发射信号相位具有严格的相干性,这使其具有更好的工程实现性;与数据级融合雷达组网相比,其仍满足数据融合需要,但其需要各雷达之间协同工作,即在雷达发射信号时需按照既定时序发射。信号级协同雷达组网综合利用多部雷达的辐射资源,采用一定的时序同时向搜索空域辐射雷达信号,从而可使搜索空域内的有源干扰设备同时在时域、频域、空域甚至极化域等进行干扰资源分配,降低了有源干扰设备在雷达工作域之内干扰性能。由于信号级协同雷达组网除了协同搜索任务之外,还需要执行单部雷达即可完成的非协同搜索任务,如对无干扰空域的目标跟踪,这就会带来如何在各雷达之间分配资源使得协同搜索范围最大化的问题。
技术实现要素:
3.本发明是为了解决现有的三部雷达信号级协同搜索场景下无法在各雷达之间分配资源使得协同搜索范围最大化的问题。本发明提出了信号级协同多雷达组网搜索资源分配方法。本发明提出了信号级协同多雷达组网搜索资源分配方法,包括以下步骤:
4.步骤1、信号级协同雷达组网;
5.步骤2、信号级协同搜索及其时空约束;
6.步骤3、最优化信号级协同搜索范围。
7.作为优选的是,步骤1中,信号级协同雷达组网根据搜索空域在组网雷达之间形成的波程差,对雷达协同发射信号的时序进行控制,使不同雷达的发射信号到达探测空域的时间基本上保持一致。
8.作为优选的是,步骤2中,信号级协同搜索资源分配的主要约束条件包括:单部雷达搜索资源与搜索周期之间的约束和雷达之间搜索周期的时序同步约束:
9.步骤2.1、单部雷达搜索资源与搜索周期之间的关系可由雷达方程导出,根据搜索雷达方程如(1)式
[0010][0011]
其中,r为雷达探测距离,p
av
为雷达平均发射功率,g
t
为发射天线增益,gr为接收天
线增益、λ为雷达波长、σ为目标rcs、k为玻尔兹曼常数,t0为室温下接收机噪声带宽,fn为接收机噪声系数,l为雷达损耗,snr为检测信噪比,tf为搜索周期;假设其总资源一定,不妨设sr0为雷达总资源,令
[0012][0013]
可见,对于特定的雷达,雷达探测距离的4次方与搜索周期成正比,而搜索周期和搜索所占的资源成反比;
[0014][0015]
sr=1-tr,(tr>tr0)
ꢀꢀꢀꢀꢀꢀ
(4)
[0016]
sr0=1-tr0ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0017]
其中sr0(≤1)为初始状态下分配给雷达搜索任务的资源百分比,对应的最佳搜索周期为t
f0
,探测距离为r0,分配给其他高优先级任务的资源比例为tr0;sr为实际分配给雷达搜索任务的资源百分比,对应的搜索周期为tf,探测距离为r,分配给其他高优先级任务的资源比例为tr,随着其中高优先级任务(如跟踪)对雷达资源占用的增多tr(>tr0),必然导致雷达搜索资源sr的减少;
[0018]
对信号级协同雷达组网而言,每部雷达各自需满足式,即
[0019][0020][0021]
其中sr
10
(≤1)为初始状态下分配给雷达1搜索任务的资源百分比,对应的最佳搜索周期为t
f10
,探测距离为r
10
;sr1为实际分配给雷达搜索任务的资源百分比,对应的搜索周期为t
f1
,探测距离为r1;sr
20
(≤1)为初始状态下分配给雷达2搜索任务的资源百分比,对应的最佳搜索周期为t
f20
,探测距离为r
20
;sr2为实际分配给雷达搜索任务的资源百分比,对应的搜索周期为t
f2
,探测距离为r2;由于其信号级协同发射时序存在一定的同步关系,使得两部雷达的协同搜索周期需满足相等的约束,即
[0022]
t
f1
=t
f2
ꢀꢀꢀ
(8);
[0023]
步骤2.2、空间约束与几何构型判定
[0024]
三部雷达为实现信号级协同搜索,要求协同搜索区域必须同时位于三部雷达的探测范围之内,此即信号级协同搜索的空间约束,为判断三部雷达是否满足信号级协同搜索的空间约束,可转换为判断三部雷达各自的探测范围是否存在重叠区域,设雷达探测范围
是以雷达站点坐标为圆心、探测距离为半径的圆,各雷达探测范围可根据需要自适应调整,因而三部雷达协同搜索范围形成的几何构型存在多种可能,总的来说,可将三部雷达具有公共重叠区域的几何构型分为以下三类情况:
[0025]
第一类:此类几何构型的特点是半径最小的圆同时被另外两圆包含,此时,三圆重叠区域面积等于半径最小的圆的面积;
[0026]
第二类,此类几何构型的特点是存在一组包含关系的圆,且其中半径较小的圆与第三个圆存在两个交点,此时三圆重叠区域面积等于其中两个圆的重叠面积;
[0027]
第三类,此类几何构型的特点是三个圆两两相交,包括两个圆相交的重叠面积、3个交点之间的重叠面积和4个交点之间的重叠面积。
[0028]
作为优选的是,步骤3中包括:
[0029]
步骤3.1、信号级协同搜索资源分配优化模型
[0030]
由于协同搜索约束的复杂性,即使在给定雷达参数和资源分配结果情况下,仍需要根据实际的搜索范围构型来解算覆盖面积,不妨设雷达的初始状态下雷达资源sr
10
、sr
20
、sr
30
,对应的最佳搜索周期为t
f10
、t
f20
、t
f30
,归一化探测距离为r
10
、r
20
、r
30
,假定要求的协同搜索周期为tf=t
f1
=t
f2
=t
f3
,三部雷达分配的资源分别为sr1、sr2、sr3(sr1+sr2+sr3=c),在雷达网总资源一定的情况下,不妨设三部雷达搜索重叠范围面积为s0,则可以定义信号级协同搜索优化模型为通过优化sr1,sr2,sr3来进行资源分配使协同搜索范围最大,同时,需要满足以下条件
[0031][0032]
式中,c为常量,表示可用于分配的总资源,约束条件表明,在进行协同搜索资源分配时,各雷达资源分配需满足单部雷达资源分配策略;同时满足协同搜索的时间约束t
f1
=t
f2
=t
f3
;可用于分配的总资源一定;各雷达用于分配的资源不大于本身的归一化总资源;
[0033]
步骤3.2、信号级协同搜索区域面积计算
[0034]
步骤3.2.1两圆相交时的重叠区域
[0035]
为求出两个圆重叠区域的面积,设雷达1部署于a点,其探测范围为以a点为圆心、r1为半径的圆;雷达2部署于b点,其探测范围为以b点为圆心、r2为半径的圆;a点与b点间距为d3,两圆交于c点与d点,
[0036]
s0=s1+s
2-2s3[0037]
其中,s1为扇形acd(b点方向)的面积,s2为扇形bcd(a点方向)的面积,s3为三角形abc的面积,
[0038][0039]
步骤3.2.2、3个交点之间的重叠的面积
[0040]
设雷达1部署于a点,其探测范围为以a点为圆心、r1为半径的圆1;雷达2部署于b点,其探测范围为以b点为圆心、r2为半径的圆2;雷达3部署于c点,其探测范围为以c点为圆心、r3为半径的圆3,圆1、圆2交于j12点与j21点,圆2、圆3交于j23点与j32点,圆3、圆1交于j13点与j31点,由几何知识可知,其重叠区域的面积s0可表示为
[0041]
s0=s
1-s2+s
3-s4+s
5-s6+s7[0042]
其中,s1为扇形aj
12j13
的面积,s2为三角形δaj
12j13
的面积,s3为扇形bj
12j23
的面积,s4为三角形δbj
12j23
的面积,s5为扇形cj
23j13
的面积,s6为三角形δcj
23j13
的面积,s7为三角形δj
12j13j23
的面积;
[0043]
步骤3.2.3、4个交点之间的重叠面积
[0044]
设雷达1部署于a点,其探测范围为以a点为圆心、r1为半径的圆1;雷达2部署于b点,其探测范围为以b点为圆心、r2为半径的圆2;雷达3部署于c点,其探测范围为以c点为圆心、r3为半径的圆3,圆1、圆2交于j12点与j21点,圆2、圆3交于j23点与j32点,圆3、圆1交于j13点与j31点,由几何知识可知,其重叠区域的面积s0可表示为
[0045]
s0=s
1-s2+s
3-s4+s
5-s6+s
7-s8+s9[0046]
其中,s1为扇形aj
12j21
的面积,s2为三角形δaj
12j21
的面积,s3为扇形bj
32j12
的面积,s4为三角形δbj
32j12
的面积,s5为扇形cj
23j32
的面积,s6为三角形δcj
23j32
的面积,s7为扇形bj
21j23
的面积,s8为三角形δbj
21j23
的面积,s9为四边形j
12j21j23j32
的面积;
[0047]
步骤3.3、基于遗传算法的协同资源分配流程
[0048]
信号级协同搜索范围优化模型即在满足约束条件的基础上使得s0取得极大值的问题,算法流程为:首先产生一个满足资源约束条件的初始种群,然后对这个种群中的每一个个体计算其适应度,判断是否满足终止条件,如果满足,则终止运算,输出最优个体为优化结果;如果不满足,则对种群中的个体进行选择、交叉和变异的遗传操作,确保新生成种群中每个个体仍满足资源约束条件,对进化后的子代群体进行适应度计算并重新进行终止条件判断,如此循环下去,直到满足终止条件;
[0049]
步骤3.3.1、创建初始种群
[0050]
设一个种群中个体的数量为np,每个个体表示成一个包含3个元素的实值参数向量,f
i,g
=[sr
i,g,1
,sr
i,g,2
,sr
i,g,3
],(i=1,2,
…np
),i为个体在对应种群中的序号,g为遗传代数,sr
i,g,1
+sr
i,g,2
+sr
i,g,3
=c,c为常量,表示可用于分配的总资源;
[0051]
步骤3.3.2、适应度计算
[0052]
针对一个种群中的每个个体,根据步骤3.2计算重叠区域面积,表示为s
0i
;
[0053]
步骤3.3.3、选择操作
[0054]
采用“轮盘赌”的选择方法,利用每个个体f
i,g
的适应度所占比例的大小来决定其子代保留的可能性,若某个个体的适应度为s
0i
,则它被选中的概率表示为
[0055][0056]
个体适应度越大,则其被选择的机会也越大,反之亦然,具体方法是产生一个[0,
1]内的均匀随机数p
01
,若该随机数小于pi,则该个体被选中作为下一代种群中的新个体;
[0057]
步骤3.3.4、交叉操作
[0058]
将种群中个体两两进行配对,对每一对个体以交叉概率pc交换它们之间的某个元素,具体方法是产生一个[0,1]内均匀分布的随机数p
01
和[1,3]内均匀分布的伪随机整数m
13
,若该随机数小于p
01
<pc,则对配对个体实值向量中第m
13
个元素执行交叉操作,同时,为满足资源约束条件sr
i,g,1
+sr
i,g,2
+sr
i,g,3
=c,对未执行交叉操作的两个元素按原比例分配剩余资源;
[0059]
步骤3.3.5、变异操作
[0060]
对交叉后种群中的每个个体,以变异概率pm改变某个元素,具体方法是产生一个[0,1]内均匀分布的随机数p
01
和[1,3]内均匀分布的伪随机整数m
13
,若该随机数小于p
01
<pm,则对配对个体实值向量中第m
13
个元素执行变异操作,同时,为满足资源约束条件sr
i,g,1
+sr
i,g,2
+sr
i,g,3
=c,对未执行变异操作的两个元素按原比例分配剩余资源。
[0061]
本发明针对三部雷达信号级协同搜索场景下有限雷达资源的搜索资源分配问题,从单部雷达搜索资源分配策略出发,确定了信号级协同搜索资源分配的时空约束条件,分析了三部雷达满足信号级协同搜索约束的几何构型及其判定方法,推导了每种几何构型下的协同搜索区域面积计算方法,建立了协同搜索优化模型及基于遗传算法的协同资源分配流程,最后设置典型场景,通过仿真分析得到了典型结论,对实际的雷达信号级协同搜索应用具有指导意义,解决了现有的三部雷达信号级协同搜索场景下无法在各雷达之间分配资源使得协同搜索范围最大化的问题。
附图说明
[0062]
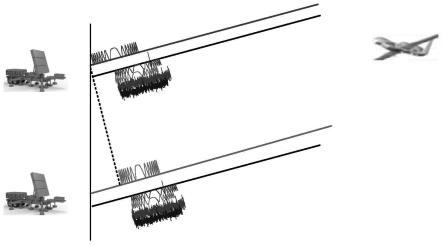
图1为信号级协同搜索示意图;
[0063]
图2为第一类几何构型示意图一;
[0064]
图3为第一类几何构型示意图二;
[0065]
图4为第一类几何构型判定流程图;
[0066]
图5为第二类几何构型示意图一;
[0067]
图6为第二类几何构型示意图二;
[0068]
图7为第二类几何构型判定流程图;
[0069]
图8为第三类几何构型示意图一;
[0070]
图9为第三类几何构型示意图二;
[0071]
图10为第三类几何构型示意图三;
[0072]
图11为第三类几何构型判定流程图;
[0073]
图12为两圆相交示意图;
[0074]
图13为三圆两两相交示意图一;
[0075]
图14为三圆两两相交示意图二;
[0076]
图15为遗传算法求解流程图;
[0077]
图16为不同资源下搜索距离与搜索周期关系曲线图;
[0078]
图17为雷达1分配的协同搜索资源sr1示意图一;
[0079]
图18为雷达2可分配的协同搜索资源曲线图一;
[0080]
图19为迭代次数曲线图一;
[0081]
图20为雷达1分配的协同搜索资源sr1示意图二;
[0082]
图21为雷达2可分配的协同搜索资源曲线图二;
[0083]
图22为迭代次数曲线图二;
[0084]
图23为雷达1分配的协同搜索资源sr1示意图三;
[0085]
图24为雷达2可分配的协同搜索资源曲线图三;
[0086]
图25为雷达1分配的协同搜索资源sr1示意图四;
[0087]
图26为雷达2可分配的协同搜索资源曲线图四。
具体实施方式
[0088]
具体实施方式一:参照附图具体说明本实施方式,如图1-26所示,本实施方式所述的信号级协同多雷达组网搜索资源分配方法,包括以下步骤:
[0089]
步骤1、信号级协同雷达组网;
[0090]
步骤2、信号级协同搜索及其时空约束;
[0091]
步骤3、最优化信号级协同搜索范围。
[0092]
具体实施方式二:参照附图具体说明本实施方式,如图1-26所示,所述步骤1中,信号级协同雷达组网根据搜索空域在组网雷达之间形成的波程差,对雷达协同发射信号的时序进行控制,使不同雷达的发射信号到达探测空域的时间基本上保持一致。
[0093]
本实施方式中,与单部相控阵雷达天线各阵元间的波程差加权补偿类似,信号级协同雷达组网根据搜索空域在组网雷达之间形成的波程差,对雷达协同发射信号的时序进行控制,使不同雷达的发射信号到达探测空域的时间基本上保持一致,这就使得该区域的有源干扰设备必须在同时间内对干扰资源进行分配,以使对每一部雷达起到干扰效果。由于信号级协同发射可以在频域、波形域以及空域等进行分集,可能使干扰设备无法同时对所有信号级协同组网雷达进行干扰,因此,信号级协同雷达组网比单部雷达具有更优秀的抗干扰效果,其基本原理如图1所示。雷达任务通常是多样化的,如除了空域搜索之外,还需要对目标进行跟踪等任务,因此单部雷达存在的资源分配问题在信号级协同雷达组网中同样存在,且由于信号级协同所需要的时序相关性,使非协同搜索任务所需资源在各雷达中的分配直接影响到协同搜索任务的综合性能,如协同搜索范围的大小的问题。
[0094]
具体实施方式三:参照附图具体说明本实施方式,如图所示,所述步骤2中,信号级协同搜索资源分配的主要约束条件包括:单部雷达搜索资源与搜索周期之间的约束和雷达之间搜索周期的时序同步约束:
[0095]
步骤2.1、单部雷达搜索资源与搜索周期之间的关系可由雷达方程导出,根据搜索雷达方程如(1)式
[0096][0097]
其中,r为雷达探测距离,p
av
为雷达平均发射功率,g
t
为发射天线增益,gr为接收天线增益、λ为雷达波长、σ为目标rcs、k为玻尔兹曼常数,t0为室温下接收机噪声带宽,fn为接收机噪声系数,l为雷达损耗,snr为检测信噪比,tf为搜索周期;假设其总资源一定,不妨设sr0为雷达总资源,令
[0098][0099]
可见,对于特定的雷达,雷达探测距离的4次方与搜索周期成正比,而搜索周期和搜索所占的资源成反比;
[0100][0101]
sr=1-tr,(tr>tr0)
ꢀꢀꢀꢀꢀꢀ
(4)
[0102]
sr0=1-tr0ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0103]
其中sr0(≤1)为初始状态下分配给雷达搜索任务的资源百分比,对应的最佳搜索周期为t
f0
,探测距离为r0,分配给其他高优先级任务的资源比例为tr0;sr为实际分配给雷达搜索任务的资源百分比,对应的搜索周期为tf,探测距离为r,分配给其他高优先级任务的资源比例为tr,随着其中高优先级任务(如跟踪)对雷达资源占用的增多tr(>tr0),必然导致雷达搜索资源sr的减少;
[0104]
对信号级协同雷达组网而言,每部雷达各自需满足式,即
[0105][0106][0107]
其中sr
10
(≥1)为初始状态下分配给雷达1搜索任务的资源百分比,对应的最佳搜索周期为t
f10
,探测距离为r
10
;sr1为实际分配给雷达搜索任务的资源百分比,对应的搜索周期为t
f1
,探测距离为r1;sr
20
(≤1)为初始状态下分配给雷达2搜索任务的资源百分比,对应的最佳搜索周期为t
f20
,探测距离为r
20
;sr2为实际分配给雷达搜索任务的资源百分比,对应的搜索周期为t
f2
,探测距离为r2;由于其信号级协同发射时序存在一定的同步关系,使得两部雷达的协同搜索周期需满足相等的约束,即
[0108]
t
f1
=t
f2
ꢀꢀꢀꢀ
(8);
[0109]
步骤2.2、空间约束与几何构型判定
[0110]
三部雷达为实现信号级协同搜索,要求协同搜索区域必须同时位于三部雷达的探测范围之内,此即信号级协同搜索的空间约束,为判断三部雷达是否满足信号级协同搜索的空间约束,可转换为判断三部雷达各自的探测范围是否存在重叠区域,设雷达探测范围是以雷达站点坐标为圆心、探测距离为半径的圆,各雷达探测范围可根据需要自适应调整,因而三部雷达协同搜索范围形成的几何构型存在多种可能,总的来说,可将三部雷达具有公共重叠区域的几何构型分为以下三类情况:
[0111]
如图2和图3所示,第一类:此类几何构型的特点是半径最小的圆同时被另外两圆包含,此时,三圆重叠区域面积等于半径最小的圆的面积;判定三部雷达协同搜索范围满足此类几何构型的流程如图4所示。
[0112]
如图5和图6所示,第二类,此类几何构型的特点是存在一组包含关系的圆,且其中半径较小的圆与第三个圆存在两个交点,此时三圆重叠区域面积等于其中两个圆的重叠面积;判断三部雷达协同搜索范围满足此种几何构型的流程如图7所示。
[0113]
如图8、图9和图10所示第三类,此类几何构型的特点是三个圆两两相交,包括两个圆相交的重叠面积、3个交点之间的重叠面积和4个交点之间的重叠面积。此种情况下,重叠区域面积分为3种情况,如图6所示,图8为两个圆相交的重叠面积,图9为3个交点之间的重叠面积,图10为4个交点之间的重叠面积,判断三部雷达协同搜索范围满足此类几何构型的流程如图11所示。
[0114]
表1雷达搜索资源分配调整策略
[0115]
策略搜索周期探测距离其他资源1tf(>t
f0
)r0tr(>tr0)2t
f0
r(<r0)tr(>tr0)3tfrtr(>tr0)
[0116]
本实施方式中,对单部雷达而言,相控阵雷达通过适当调整搜索参数r、tf来适应搜索资源的减少。一般地,参数调整策略有如下几种,见表1。策略1是调整相控阵雷达的搜索周期来适应搜索资源的减少,而保持雷达的探测距离不变。策略2是调整雷达的探测距离而保持雷达初始的最优搜索周期不变。策略3则是综合策略1和策略2,同时改变雷达的搜索周期和探测距离,在有限的搜索资源下求得最优的搜索周期和探测距离使得相控阵雷达的搜索性能达到最优。
[0117]
具体实施方式四:参照附图具体说明本实施方式,如图1-26所示,步骤3中包括:
[0118]
步骤3.1、信号级协同搜索资源分配优化模型
[0119]
由于协同搜索约束的复杂性,即使在给定雷达参数和资源分配结果情况下,仍需要根据实际的搜索范围构型来解算覆盖面积,不妨设雷达的初始状态下雷达资源sr
10
、sr
20
、sr
30
,对应的最佳搜索周期为t
f10
、t
f20
、t
f30
,归一化探测距离为r
10
、r
20
、r
30
,假定要求的协同搜索周期为tf=t
f1
=t
f2
=t
f3
,三部雷达分配的资源分别为sr1、sr2、sr3(sr1+sr2+sr3=c),在雷达网总资源一定的情况下,如何在各雷达之间分配资源使得协同搜索范围最大化是协同搜索面临的关键问题之一,上文以三部雷达进行信号级协同组网搜索为例,分析了信号级协同搜索的时空约束条件,不妨设三部雷达搜索重叠范围面积为s0,则可以定义信号级协同搜索优化模型为通过优化sr1,sr2,sr3来进行资源分配使协同搜索范围最大,同时,需要满足以下条件
[0120][0121]
式中,c为常量,表示可用于分配的总资源,约束条件表明,在进行协同搜索资源分配时,各雷达资源分配需满足单部雷达资源分配策略;同时满足协同搜索的时间约束t
f1
=t
f2
=t
f3
;可用于分配的总资源一定;各雷达用于分配的资源不大于本身的归一化总资源;
[0122]
步骤3.2、信号级协同搜索区域面积计算
[0123]
步骤3.2.1两圆相交时的重叠区域
[0124]
为求出两个圆重叠区域的面积,设雷达1部署于a点,其探测范围为以a点为圆心、r1为半径的圆;雷达2部署于b点,其探测范围为以b点为圆心、r2为半径的圆;a点与b点间距为d3,两圆交于c点与d点,
[0125]
s0=s1+s
2-2s3[0126]
其中,s1为扇形acd(b点方向)的面积,s2为扇形bcd(a点方向)的面积,s3为三角形abc的面积,
[0127][0128]
步骤3.2.2、3个交点之间的重叠的面积
[0129]
设雷达1部署于a点,其探测范围为以a点为圆心、r1为半径的圆1;雷达2部署于b点,其探测范围为以b点为圆心、r2为半径的圆2;雷达3部署于c点,其探测范围为以c点为圆心、r3为半径的圆3,圆1、圆2交于j12点与j21点,圆2、圆3交于j23点与j32点,圆3、圆1交于j13点与j31点,由几何知识可知,其重叠区域的面积s0可表示为
[0130]
s0=s
1-s2+s
3-s4+s
5-s6+s7[0131]
其中,s1为扇形aj
12j13
的面积,s2为三角形δaj
12j13
的面积,s3为扇形bj
12j23
的面积,s4为三角形δbj
12j23
的面积,s5为扇形cj
23j13
的面积,s6为三角形δcj
23j13
的面积,s7为三角形δj
12j13j23
的面积;
[0132]
步骤3.2.3、4个交点之间的重叠面积
[0133]
设雷达1部署于a点,其探测范围为以a点为圆心、r1为半径的圆1;雷达2部署于b点,其探测范围为以b点为圆心、r2为半径的圆2;雷达3部署于c点,其探测范围为以c点为圆心、r3为半径的圆3,圆1、圆2交于j12点与j21点,圆2、圆3交于j23点与j32点,圆3、圆1交于j13点与j31点,由几何知识可知,其重叠区域的面积s0可表示为
[0134]
s0=s
1-s2+s
3-s4+s
5-s6+s
7-s8+s9[0135]
其中,s1为扇形aj
12j21
的面积,s2为三角形δaj
12j21
的面积,s3为扇形bj
32j12
的面
积,s4为三角形δbj
32j12
的面积,s5为扇形cj
23j32
的面积,s6为三角形δcj
23j32
的面积,s7为扇形bj
21j23
的面积,s8为三角形δbj
21j23
的面积,s9为四边形j
12j21j23j32
的面积;
[0136]
步骤3.3、基于遗传算法的协同资源分配流程
[0137]
信号级协同搜索范围优化模型即在满足约束条件的基础上使得s0取得极大值的问题,一般而言,最大协同搜索范围是几个参数的非线性函数,通常不能直接求出其极值的解析表达式,但可采用遗传算法等优化算法进行求解,通过遗传算法来对雷达资源进行分配,以使协同搜索范围最大化,算法流程为:首先产生一个满足资源约束条件的初始种群,然后对这个种群中的每一个个体计算其适应度,判断是否满足终止条件,如果满足,则终止运算,输出最优个体为优化结果;如果不满足,则对种群中的个体进行选择、交叉和变异的遗传操作,确保新生成种群中每个个体仍满足资源约束条件,对进化后的子代群体进行适应度计算并重新进行终止条件判断,如此循环下去,直到满足终止条件;
[0138]
步骤3.3.1、创建初始种群
[0139]
设一个种群中个体的数量为np,每个个体表示成一个包含3个元素的实值参数向量,f
i,g
=[sr
i,g,1
,sr
i,g,2
,sr
i,g,3
],(i=1,2,
…np
),i为个体在对应种群中的序号,g为遗传代数,sr
i,g,1
+sr
i,g,2
+sr
i,g,3
=c,c为常量,表示可用于分配的总资源;
[0140]
步骤3.3.2、适应度计算
[0141]
针对一个种群中的每个个体,根据步骤3.2计算重叠区域面积,表示为s
0i
;
[0142]
步骤3.3.3、选择操作
[0143]
采用“轮盘赌”的选择方法,利用每个个体f
i,g
的适应度所占比例的大小来决定其子代保留的可能性,若某个个体的适应度为s
0i
,则它被选中的概率表示为
[0144][0145]
个体适应度越大,则其被选择的机会也越大,反之亦然,具体方法是产生一个[0,1]内的均匀随机数p
01
,若该随机数小于pi,则该个体被选中作为下一代种群中的新个体;
[0146]
步骤3.3.4、交叉操作
[0147]
将种群中个体两两进行配对,对每一对个体以交叉概率pc交换它们之间的某个元素,具体方法是产生一个[0,1]内均匀分布的随机数p
01
和[1,3]内均匀分布的伪随机整数m
13
,若该随机数小于p
01
<pc,则对配对个体实值向量中第m
13
个元素执行交叉操作,同时,为满足资源约束条件sr
i,g,1
+sr
i,g,2
+sr
i,g,3
=c,对未执行交叉操作的两个元素按原比例分配剩余资源;
[0148]
步骤3.3.5、变异操作
[0149]
对交叉后种群中的每个个体,以变异概率pm改变某个元素,具体方法是产生一个[0,1]内均匀分布的随机数p
01
和[1,3]内均匀分布的伪随机整数m
13
,若该随机数小于p
01
<pm,则对配对个体实值向量中第m
13
个元素执行变异操作,同时,为满足资源约束条件sr
i,g,1
+sr
i,g,2
+sr
i,g,3
=c,对未执行变异操作的两个元素按原比例分配剩余资源。
[0150]
本发明仿真结果如下:
[0151]
1、单部雷达搜索策略调整
[0152]
设某雷达初始状态资源sr0=1,归一化探测距离为r0=1,搜索周期tf0=20s。则根据式3可得到在实际分配的搜索资源下搜索距离与搜索周期的关系曲线,如图5和图6所示,
可以看出,当雷达实际分配的搜索资源受限时,可以通过适当调整搜索参数r、tf来适应搜索资源的减少。若要求搜索范围不变时,则必须增加搜索周期,反之,若要求搜索周期不变时,则搜索范围势必会减小。
[0153]
2、三部相同性能雷达资源分配分析
[0154]
首先讨论三部性能相同的雷达进行信号级组网协同搜索,设雷达的初始状态雷达资源sr
10
=sr
20
=sr
30
=1,总资源为3,可由单部雷达完成的搜索任务所需资源tr=tr
10
=tr
20
=tr
30
=1.5,则可用于信号级组网协同搜索的雷达资源sr=sr
10
+sr
20
+sr
30-tr为1.5。对应的最佳搜索周期为t
f10
=t
f20
=t
f30
=20s,归一化探测距离为r
10
=r
20
=r
30
=1,设在进行组网搜索时,三部雷达布站间距相等,不妨设雷达1、雷达2、雷达3位置坐标分别为(0,0)、(1,0)、仍令协同搜索周期t
f1
=t
f2
=t
f3
=20s,根据优化模型,协同搜索区域面积在雷达1、雷达2实际分配的协同搜索资源平面的等高线图如图5和图6所示。可以看出,单部雷达最大可分配资源为1,两部雷达分配资源之和最大为1.5。在雷达1分配资源给定的条件下,协同搜索区域与雷达2的分配资源的关系曲线如图所示,其为上图的纵剖面。可以看出三部雷达资源分配比为1:1:1时,即每部雷达分配资源为0.5时,协同搜索区域达到最大,而根据4.3节优化模型的遗传算法求解,得到的分配结果为0.4998、0.4998、0.5004。
[0155]
3、三部不同性能雷达资源分配分析
[0156]
当两部不同性能的雷达进行信号级组网协同搜索时,不同性能可由最佳搜索周期和归一化探测距离来表征。
[0157]
情况一:最佳搜索周期相同,而探测距离不同,不妨设雷达的初始状态雷达资源sr
10
=sr
20
=sr
30
=1,总资源为3,可由单部雷达完成的搜索任务所需资源tr=tr
10
=tr
20
=tr
30
=1.5,则可用于信号级组网协同搜索的雷达资源sr=sr
10
+sr
20
+sr
30-tr为1.5。对应的最佳搜索周期为t
f10
=t
f20
=t
f30
=20s,归一化探测距离为r
10
=r
20
=1,r
30
=2,设在进行组网搜索时,三部雷达布站间距相等,不妨设雷达1、雷达2、雷达3位置坐标分别为(0,0)、(1,0)、仍令协同搜索周期t
f1
=t
f2
=t
f3
=20s,根据优化模型,协同搜索区域在雷达1、雷达2实际分配的协同搜索资源平面的等高线图如图4所示。可以看出,单部雷达最大可分配资源为1,两部雷达分配资源之和最大为1.5。在雷达1分配资源给定的条件下,协同搜索区域与雷达2的分配资源的关系曲线如图所示,其为上图的纵剖面。可以看出协同搜索区域达到最大时三部雷达资源分配比不再是1:1:1。根据4.3节优化模型的遗传算法求解,得到的最优分配结果为0.6165、0.6194、0.2641。
[0158]
若其他参数不变,仅归一化探测距离变为r
10
=1,r
20
=2,r
30
=1时的结果如图所示,此时,根据4.3节优化模型的遗传算法求解,得到的最优分配结果为0.6189、0.2636、0.6175。归一化探测距离变为r
10
=2,r
20
=1,r
30
=1时的结果如图所示,此时,根据优化模型的遗传算法求解,得到的最优分配结果为0.2631、0.6169、0.6200。可以看出,为使协同搜索区域最大,性能越好的雷达所需分配的协同搜索资源越少,反之性能较差的雷达所需分配的协同搜索资源越多。另外,从图20、图21和图22中和最优分配结果中可以看出,在等间距布站条件下,为使协同搜索区域最大,性能相同的雷达的资源分配占比总是1:1。
[0159]
情况二:探测距离相同,而最佳搜索周期不同,不妨设对应的最佳搜索周期为t
f10
=10s,t
f20
=t
f30
=20s,归一化探测距离为r
10
=r
20
=r
30
=1。由于信号级协同发射时序存在一定的同步关系,使得两部雷达的协同搜索周期需满足相等的约束,即t
f1
=t
f2
=t
f3
。一般情况下,可使搜索周期短的雷达的周期加长与搜索周期较长的一致,以满足约束条件,根据单部雷达搜索策略调整模型,加长搜索周期可以增加搜索距离,可以看出,雷达1的性能优于雷达2、雷达3,因此,情况二假设下,本质上与情况一假设的求解相同,过程与结果不再重复。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1