一种圆形温度场声学测量拓扑结构重建方法
1.本发明涉及技术领域,特别涉及一种圆形温度场声学测量拓扑结构重建方法。
背景技术:
2.在燃烧过程中,由燃料引起的不稳定燃烧过程以及不均匀的气体流动,会造成测量位置的气体温度快速变化,导致温度测量不准确,因此需要进行温度场重建。这种现象经常发生在如锅炉、燃气轮机、火箭发送机等各类工业及推进装置。
3.不少日常生活场景和工业生产过程都存在着圆形区域温度场重建的需求,但由于需要重建的温度场条件各异,相同的拓扑结构不能适应本温度场时,重建的误差就比较大。目前关于二维平面温度场重建优化的研究多数是针对矩形区域展开讨论,极少设计圆形区域的情况,这是因为圆形区域的边界条件比方形更加模糊,布置声波换能器需考虑的因素更多,从而导致优化的难度增加。因此在圆形区域温度场重建的过程中,还需要对一些影响因素进行优化。
技术实现要素:
4.本发明的目的在于在不改变声波换能器的数量的情况下,调整圆形区域声波换能器的拓扑结构和子温区域划分,来解决圆形区域温度场重建的问题,提供一种圆形温度场声学测量拓扑结构重建方法。
5.为了实现上述发明目的,本发明实施例提供了以下技术方案:一种圆形温度场声学测量拓扑结构重建方法,包括以下步骤:步骤s1:确定声波换能器的数量;基于径向基拟合与奇异值分解结合的方法对圆形区域进行初步划分,在初步划分的圆形区域中包括外圆、内圆;步骤s2:采用粒子群优化算法对所有声波换能器的位置参数、圆形区域中内圆的半径参数、圆形区域中子温区域的弧度参数进行优化,以重构圆形区域的拓扑结构;步骤s3:根据步骤s2得到的圆形区域的拓扑结构,重构温度场,计算圆形区域的温度函数。
6.更进一步地,所述步骤s2具体包括以下步骤:初步划分后确定有j个声波换能器,圆形区域中包括n个子温区域;将j个声波换能器设置在圆形区域的外圆圆周上,声波换能器的初始坐标为(xj,yj),其中j表示第j个声波换能器,j∈j;第j个声波换能器的最佳位置坐标为(x`j,y`j),用极坐标形式表示为:),用极坐标形式表示为:其中,为与横坐标的夹角;将极坐标形式转换为矩阵形式表示:
声波换能器在外圆圆周上的转动角度为,且每个声波换能器的转动角度相互之间无关联;内圆半径为r;n个子温区域的弧度为,i表示第i个子温区域;将j个声波换能器的转动角度为作为位置参数,且位置参数的初始值为中的随机值;将内圆半径r作为半径参数r,且半径参数r的初始值为[1,5]中的随机值;将n个子温区域的弧度作为弧度参数,且内圆中的子温区域的弧度相加为,外圆中的子温区域的弧度相加为;将j个位置参数、1个半径参数、n个弧度参数作为一个维度的参数放入维度为k*(j+1+n)的矩阵a中,矩阵a的变换速度矩阵为v,通过粒子群优化算法对变换速度矩阵v进行迭代,直到变换速度矩阵v的误差满足预设条件或迭代轮次t满足预设条件,得到圆形区域的拓扑结构。
[0007]
更进一步地,所述矩阵a的变换速度矩阵为v,通过粒子群优化算法对变换速度矩阵v进行迭代,直到变换速度矩阵v的误差满足预设条件或迭代轮次t满足预设条件的步骤,包括:第一轮次:将矩阵a1放入重构模型的临时最佳矩阵pbest中,将矩阵a1中所有参数代入重构模型,搜索本组k维的矩阵a1中能使误差最小的一个维度的参数作为本轮次优化的最佳值gbest,由最佳值gbest得出下一轮次矩阵a2的变换速度矩阵v2:其中,a1(k,;)表示第一轮次所使用的k维矩阵a1中的第k维参数;v1(k,;)表示第一轮次所使用的k维矩阵a1中的第k维参数的变换速度,是初始随机值;v2(k,;)表示第二轮次所使用的k维矩阵a2中的第k维参数的变换速度,用于更新第二轮次所使用的k维矩阵a2;pbest(k,;)表示本轮次的k维临时最佳矩阵pbest中的第k维参数;gbest表示本轮次的k维临时最佳矩阵pbest中能使误差最小的一个维度的参数;w、c1、c2分别表示标量常量;rand表示[0,1]的随机标量;第二轮次:使用上一轮次得出的变换速度v2更新矩阵a1,得到本轮次的矩阵a2=a1+v2,将矩阵a2中所有参数带入重构模型,同时将矩阵a2得到的误差与上一轮临时最佳矩阵pbest对应维度参数的误差相对比,如果矩阵a2的误差较小,则更新临时最佳矩阵pbest对应维度的参数,否则不更新;搜索本组k维的临时最佳矩阵pbest中能使误差最小的一个维度的参数作为本轮次优化的最佳值gbest,由最佳值gbest得出下一轮次矩阵a3的变换速度矩阵v3:其中,a2(k,;)表示第二轮次所使用的k维矩阵a2中的第k维参数;v2(k,;)表示第二轮次所使用的k维矩阵a2中的第k维参数的变换速度;v3(k,;)表示第三轮次所使用的k维矩阵a3中的第k维参数的变化速度,用于更新第三轮次所使用的k维矩阵a3;pbest(k,;)表示本轮次的k维临时最佳矩阵pbest中的第k维参数;gbest表示本轮次的k维临时最佳矩阵pbest中能使误差最小的一个维度的参数;直到第t轮次:使用上一轮次得出的变换速度v
t
更新矩阵a
t-1
,得到本轮次的矩阵a
t
=a
t-1
+v
t
,将矩阵a
t
中所有参数带入重构模型,同时将矩阵a
t
得到的误差与上一轮临时最佳
矩阵pbest对应维度参数的误差相对比,如果矩阵a
t
的误差较小,则更新临时最佳矩阵pbest对应维度的参数,否则不更新;搜索本组k维的临时最佳矩阵pbest中能使误差最小的一个维度的参数作为本轮次优化的最佳值gbest,由最佳值gbest得出下一轮次矩阵a
t+1
的变换速度矩阵v
t+1
:其中,a
t
(k,;)表示第t轮次所使用的k维矩阵a
t
中的第k维参数;v
t
(k,;)表示第t轮次所使用的k维矩阵a
t
中的第k维参数的变换速度;v
t+1
(k,;)表示下一轮次所使用的k维矩阵a
t+1
中的第k维参数的变化速度,用于更新下一轮次所使用的k维矩阵a
t+1
;pbest(k,;)表示本轮次的k维临时最佳矩阵pbest中的第k维参数;gbest表示本轮次的k维临时最佳矩阵pbest中能使误差最小的一个维度的参数;直到变换速度矩阵v的误差满足预设条件或迭代轮次t满足预设条件,得到圆形区域的拓扑结构。
[0008]
更进一步地,所述根据步骤s2得到的圆形区域的拓扑结构,重构温度场,计算圆形区域的温度函数的步骤,包括:若在步骤s1中基于径向基拟合方法对圆形区域进行初步划分时,将圆形区域划分为n个子温区域,j个声波换能器在圆形区域中共有q条声波传播路径,设n个子温区域的声波速度分布函数为u(x,y),声波速度分布函数的倒数为f(x,y),声波在圆形区域中沿特定传播路径的声波飞行时间为:其中,lq为第q条声波传播路径,q∈q;tq为该条声波传播路径对应的声波飞行时间;将声波速度分布函数的倒数为f(x,y)表示为以划分子温区域的几何中心为中心的n个径向基函数的线性组合:其中,为待定系数,描述了声波速度分布函数的倒数为f(x,y)在第i个子温区域中的空间特征;(x,y)为温度待测点的位置坐标;为第i个子温区域所选择的径向基函数;其中,(xi,yi)为径向基函数的中心位置坐标,即第i个子温区域的几何中心;在径向基函数确定后定义路程加权数g
qi
为:为求得待定系数,合并公式得到:
定义矩阵:g=(g
qi
),q=1,2,...,q,i=1,2,...,n;,i=1,2,...,n;;其中q表示圆形区域中的声波传播路径,n表示圆形区域中的子温区域,将矩阵整合为,其中描述了声波速度分布函数的倒数为f(x,y),通过可求出温度函数t(x,y)。
[0009]
与现有技术相比,本发明的有益效果:本方案能够在声波换能器数量确定的情况下,将改变声波换能器在圆形区域的布局以及子温区域的划分,基于粒子群优化算法以温度场重构模型的均方根误差最小为目标,从而更精确的对温度场进行重构。
附图说明
[0010]
为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍, 应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
[0011]
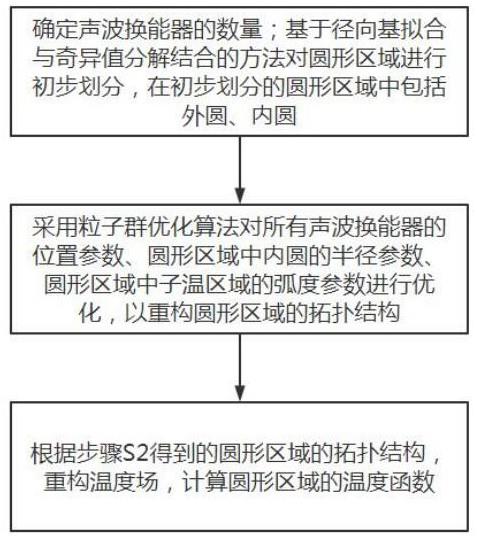
图1为本发明方法流程图;图2为本发明实施例圆形区域初步划分的拓扑结构;图3为本发明实施例2圆形区域优化后的拓扑结构。
具体实施方式
[0012]
下面将结合本发明实施例中附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0013]
应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。同时,在本发明的描述中,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性,或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。
[0014]
实施例1:本发明通过下述技术方案实现,如图1所示,一种圆形温度场声学测量拓扑结构重建方法,包括以下步骤:步骤s1:确定声波换能器的数量;基于径向基拟合方法对圆形区域进行初步划分,在初步划分的圆形区域中包括外圆、内圆。
[0015]
在工程实用中,会出现诸如单峰、双峰、三峰甚至混合峰温度场,对于这些不同的
温度场,采用同样的拓扑结构分布并没有将其中温度场的差异考虑进去,因此无法将重构温度场误差降至最低。
[0016]
本方案不改变温度场中声波换能器的数量,假设某个温度场中已设置了5个声波换能器(j=5),圆形区域温度场重构算法目前包括最小二乘法、径向基拟合与最小二乘法结合、径向基拟合与奇异值分解结合等重构方法,其中径向基拟合与奇异值分解结合的方法能使基本误差最小,因此本实施例以该方法为例。
[0017]
要重建出一个圆形区域的温度场时,径向基重构方法一般可以将具有5个声波换能器的圆形区域初步划分为15个子温区域,请参见图2,tr1-tr5分别为5个声波换能器的位置,初步划分的圆形区域中包括外圆、内圆,其中外圆中具有10个子温区域(虚线部分分别为1-10),内圆中具有5个子温区域(虚线部分分别为11-15)。
[0018]
需要解释的是,径向基重构方法可以将任意数量声波换能器所在的区域划分为对应数量的子温区域,具体的划分过程本方案不再赘述,属于现有技术。
[0019]
步骤s2:采用粒子群优化算法对所有声波换能器的位置参数、圆形区域中内圆的半径参数、圆形区域中子温区域的弧度参数进行优化,以重构圆形区域的拓扑结构。
[0020]
经过步骤s1初步划分后确定有5个声波换能器(j=5),经过径向基重构方法将5个声波换能器所在的圆形区域划分为15个子温区域(n=15),将5个声波换能器设置在圆形区域的外圆圆周上,请参见图2,本方案为了针对不同温度场,计算出其中声波换能器和子温区域的最佳拓扑结构,采用粒子群优化算法(particle swarm optimization,pso)对初步划分的圆形区域中的各个参数进行优化,以得到最佳的拓扑结构。
[0021]
首先请参见图2中所述的坐标轴,任一个声波换能器的初始坐标为(xj,yj),其中j表示第j个声波换能器,j∈j。那么第j个声波换能器的最佳位置坐标为(x`j,y`j),用极坐标的形式表示为:的形式表示为:其中,为与横坐标的夹角;将极坐标形式转换为矩阵形式表示:相对于声波换能器的初始位置,声波换能器在外圆圆周上的转动角度为,转动角度是相对于圆心的,且每个声波换能器的转动角度相互之间无关联;内圆半径为r;n个子温区域的弧度为,i表示第i个子温区域。
[0022]
将5个声波换能器的转动角度为作为位置参数,且位置参数的初始值为中的随机值;将内圆半径r作为半径参数r,且半径参数r的初始值为[1,5]中的随机值;将15个子温区域的弧度作为弧度参数,且内圆中的子温区域的弧度,外圆中的子温区域的弧度。
[0023]
将5个位置参数、1个半径参数、15个弧度参数作为一个维度的参数:
将该一个维度的参数放入k维的矩阵a中,假设k=100,则表示矩阵a中共有100行,每一行代表一个维度的上述参数。定义矩阵a的变换速度矩阵为v,通过粒子群优化算法对变换速度矩阵v进行迭代:第一轮次:将矩阵a1放入重构模型的临时最佳矩阵pbest中,将矩阵a1中所有参数代入重构模型,搜索本组k维的矩阵a1中能使误差最小的一个维度的参数作为本轮次优化的最佳值gbest,由最佳值gbest得出下一轮次矩阵a2的变换速度矩阵v2:其中,a1(k,;)表示第一轮次所使用的k维矩阵a1中的第k维参数;v1(k,;)表示第一轮次所使用的k维矩阵a1中的第k维参数的变换速度,是初始随机值;v2(k,;)表示第二轮次所使用的k维矩阵a2中的第k维参数的变换速度,用于更新第二轮次所使用的k维矩阵a2;pbest(k,;)表示本轮次的k维临时最佳矩阵pbest中的第k维参数;gbest表示本轮次的k维临时最佳矩阵pbest中能使误差最小的一个维度的参数;w、c1、c2分别表示标量常量;rand表示[0,1]的随机标量;第二轮次:使用上一轮次得出的变换速度v2更新矩阵a1,得到本轮次的矩阵a2=a1+v2,将矩阵a2中所有参数带入重构模型,同时将矩阵a2得到的误差与上一轮临时最佳矩阵pbest对应维度参数的误差相对比,如果矩阵a2的误差较小,则更新临时最佳矩阵pbest对应维度的参数,否则不更新;搜索本组k维的临时最佳矩阵pbest中能使误差最小的一个维度的参数作为本轮次优化的最佳值gbest,由最佳值gbest得出下一轮次矩阵a3的变换速度矩阵v3:其中,a2(k,;)表示第二轮次所使用的k维矩阵a2中的第k维参数;v2(k,;)表示第二轮次所使用的k维矩阵a2中的第k维参数的变换速度;v3(k,;)表示第三轮次所使用的k维矩阵a3中的第k维参数的变化速度,用于更新第三轮次所使用的k维矩阵a3;pbest(v,;)表示本轮次的k维临时最佳矩阵pbest中的第k维参数;gbest表示本轮次的k维临时最佳矩阵pbest中能使误差最小的一个维度的参数;直到第t轮次:使用上一轮次得出的变换速度v
t
更新矩阵a
t-1
,得到本轮次的矩阵a
t
=a
t-1
+v
t
,将矩阵a
t
中所有参数带入重构模型,同时将矩阵a
t
得到的误差与上一轮临时最佳矩阵pbest对应维度参数的误差相对比,如果矩阵a
t
的误差较小,则更新临时最佳矩阵pbest对应维度的参数,否则不更新;搜索本组k维的临时最佳矩阵pbest中能使误差最小的一个维度的参数作为本轮次优化的最佳值gbest,由最佳值gbest得出下一轮次矩阵a
t+1
的变换速度矩阵v
t+1
:
其中,a
t
(k,;)表示第t轮次所使用的k维矩阵a
t
中的第k维参数;v
t
(k,;)表示第t轮次所使用的k维矩阵a
t
中的第k维参数的变换速度;v
t+1
(k,;)表示下一轮次所使用的k维矩阵a
t+1
中的第k维参数的变化速度,用于更新下一轮次所使用的k维矩阵a
t+1
;pbest(k,;)表示本轮次的k维临时最佳矩阵pbest中的第k维参数;gbest表示本轮次的k维临时最佳矩阵pbest中能使误差最小的一个维度的参数。
[0024]
直到变换速度矩阵v的误差满足预设条件或迭代轮次t满足预设条件,得到圆形区域的拓扑结构。由此可以确定重构的圆形区域的拓扑结构,即j个声波换能器、内圆半径、子温区域弧度都通过迭代找到了最佳的位置和参数,使得圆形区域划分了最佳的拓扑结构。
[0025]
步骤s3:根据步骤s2得到的圆形区域的拓扑结构,重构温度场,计算圆形区域的温度函数。
[0026]
传统的声波测温原理为:对于理想气体而言,其气体介质中声波传输速度v和温度t之间的函数关系为:其中v为声波传播速度,t为气体截止温度,r为理想气体普适常数,m为气体摩尔质量,γ为气体绝热指数。对于特定的气体或确定的气体混合物而言,为一固定可知的常数。
[0027]
因此,气体环境下的声波传播速度v将只取决于气体温度t,由于b均为事先可以确定的固定常数,故通过测量声波在该路径上的传播时间t就可以获得该条路径上的平均温度t:对于特定区域,距离l已知,因此当得知声波在某个区域中传播的时间t,就可以得到该区域的平均温度t。
[0028]
在本方案中,圆形区域温度场重构时,将圆形区域划分为15个子温区域(n=15),5个声波换能器(j=5)在圆形区域中共有20条声波传播路径(q=20),假设15个子温区域的声波速度分布函数为为u(x,y),声波速度分布函数的倒数为f(x,y),声波在圆形区域中沿特定传播路径的声波飞行时间为:其中,lq为第q条声波传播路径,q∈q;tq为该条声波传播路径对应的声波飞行时间。
[0029]
将声波速度分布函数的倒数为f(x,y)表示为以划分子温区域的几何中心为中心的n个径向基函数的线性组合:
其中,为待定系数,描述了声波速度分布函数的倒数为f(x,y)在第i个子温区域中的空间特征;(x,y)为温度待测点的位置坐标;为第i个子温区域所选择的径向基函数;其中,(xi,yi)为径向基函数的中心位置坐标,即第i个子温区域的几何中心;在径向基函数确定后定义路程加权数g
qi
为:为求得待定系数,合并公式得到:定义矩阵:g=(g
qi
),q=1,2,...,q,i=1,2,...,n;,i=1,2,...,n;;其中q表示圆形区域中的声波传播路径,n表示圆形区域中的子温区域,将矩阵整合为,其中g描述了q条路径对径向基函数的积分,是距离信息,描述了声波速度分布函数的倒数为f(x,y),是速度信息,通过可求出温度函数t(x,y)。
[0030]
综上所述,本方案能够在声波换能器数量确定的情况下,将改变声波换能器在圆形区域的布局以及子温区域的划分,基于粒子群优化算法以温度场重构模型的均方根误差最小为目标,从而更精确的对温度场进行重构。
[0031]
实施例2:本实施例作为实施例1的实验验证:首先,使用径向基拟合与奇异值分解结合的方法,声波换能器为5个,子温区域的划分如图2所示,在衡量一个温度场重建是否达到最优时,使用以下四种误差来衡量:最大误差:最小误差:平均绝对误差:平均均方根误差:其中n为圆形区域中随机挑选的n个待测点,本实施例中n取121*121;tr表示重建的温度场;tm表示原温度场;tm
mean
表示原温度场的n个待测点的平均温度。
[0032]
由于平均均方根误差不受某个极值点的影响,更能反应重构后的温度场的整体误差,选用以最终重建的温度场平均均方根误差最小的目标函数。
[0033]
其次,使用上述方法得出三个温度场的最优拓扑结构,以双峰偏移温度场为例,请参见图3为优化后的拓扑结构。
[0034]
最后,对于优化后的结果与优化前的结果进行对比,计算其与标准模型的误差,得出其中不仅目标函数(平均均方根误差)减小50%,其余误差也有减小,可以看出优化后的重
构结构更适用当前温度场。
[0035]
如表1所示为单峰偏斜误差比较:表1 单峰偏斜(优化前)单峰偏斜(优化后)最大误差69.2363.64最小误差00平均绝对误差29.2211.64平均均方根误差2.41.01如表2所示为双峰偏斜误差比较:表2 双峰偏斜(优化前)双峰偏斜(优化后)最大误差279.62341.39最小误差00平均绝对误差62.8436.94平均均方根误差7.934.51如表3所示为三峰偏斜误差比较:表3 三峰偏斜(优化前)三峰偏斜(优化后)最大误差336.43352.37最小误差00平均绝对误差91.3760.94平均均方根误差9.486.20以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应所述以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1