一种基于MEMS麦克风的声像仪系统的制作方法
一种基于mems麦克风的声像仪系统
技术领域
1.本发明涉及噪声测量的技术领域,具体涉及一种基于mems麦克风的声像仪系统。
背景技术:
2.随着社会的发展,现在我们的生产生活越来越依赖于各种各样的设备,虽然它们给我们的日常生活带来了便利,但也产生了一系列问题,其中就包括噪声污染,它给人们的身心健康带来了严峻的挑战,长期处在噪声环境中,对设备寿命和人体健康危害都非常大。
3.当前针对噪声的控制主要从噪声源、噪声传播路径和接受者保护三个途径着手。最直接和有效的方法就是从噪声产生源头上控制噪声,而无论采用哪种噪声控制方法,首先要做的就是弄清楚主要噪声源发声位置,进而采取相应的检查和控制措施。其中非接触、远距离传声器阵列技术因为可以直接对噪声源实施可视化识别定位,成为了研究的重点,得到了广泛的应用。
4.声像仪系统以图像或视频的形式直观呈现声源位置帮助人们非常快速便捷的找到设备噪声源位置因此得到了大力的发展。目前传统的声像仪系统尺寸大、安装繁琐、适用范围窄、成本高,噪声定位不够准确和直观,因此很有必要提供一种简单高效、适用性强的声像仪系统。
技术实现要素:
5.本发明的目的是提出一种基于mems麦克风的声像仪系统,有效解决现有声像仪系统适用范围小、定位精度低、互动性差的问题。
6.本发明的技术方案:
7.本技术实施例提供一种基于mems麦克风的声像仪系统,包括传声阵列测量单元以及声源定位处理单元,
8.所述传声阵列测量单元,用于获得噪声设备的声压信号,以及所属噪声设备的视频图像;
9.所述声源定位处理单元,用于对声压信号和图像信息进行处理,最终以分布图或视频图像的形式显示定位结果。
10.所述传声阵列测量单元包括阵列支架,所述阵列支架上安装mems麦克风以及摄像头,mems麦克风采集噪声设备的声压信号,摄像头对噪声设备进行拍照或者实时进行视频图像采集;
11.所述mems麦克风采集的声压信号通过同步数据采集单元传输给声源定位处理单元;
12.所述摄像头与声源定位处理单元连接,用以将采集的图像信息传输给声源定位处理单元;
13.所述声源定位处理单元对声压信号和图像信息进行处理,最终以分布图或视频图像的形式显示定位结果。
14.所述阵列支架安装在可调节式三脚架上,所述摄像头安装在阵列支架的中心。
15.所述mems麦克风设置有64个,64个mems麦克风按照质数螺旋阵形安装在阵列支架上。
16.所述mems麦克风和同步数据采集单元有线连接。
17.所述声源定位处理单元包括用于实现单通道的音频信号可视化的音频处理模块、用于对摄像头拍摄的图片进行分析的视频校准模块、用于复现对应时刻的声像图的离线噪声源检测模块、用于实现切换和选择功能的定位模块以及用于对mems麦克风和摄像头进行配置的硬件配置模块。
18.所述音频处理模块实现单通道的音频信号可视化,显示该通道信号的波形和频谱以及进行多通道的信号叠加和对比。
19.所述视频校准模块对摄像头拍摄的图片进行分析,通过修正水平平移,垂直平移,旋转角参数,修正视频模块的数据。
20.所述离线噪声源检测模块通过将mems麦克风采集的声压信号和摄像头采集的图像信息相结合,采用离线噪声源定位的方式复现对应时刻的声像图。
21.所述定位模块具备算法切换、动态范围选择和频率带选择功能。
22.所述硬件配置模块配置所有通道mems麦克风的灵敏度和修正系数,以及摄像头的开启/关闭状态。
23.与现有技术相比,本发明的有益效果是:本发明的声像仪系统采用了mems麦克风作为传声器,其成本低、稳定性强、便捷性好,并采用指数螺旋阵形,提高了系统的噪声定位精度;同时声像仪软件具备的多个模块可以满足用户的不同需求,适用范围更大、可操作性更好、系统的功能更加强大。
附图说明
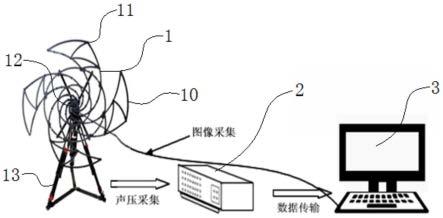
24.图1为本发明的系统结构示意图;
25.图2为本发明的噪声定位流程示意图;
26.图3为本发明的软件功能模块示意图。
具体实施方式
27.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
28.如图1所示,实施例1,本技术实施例提供一种基于mems麦克风的声像仪系统,包括传声阵列测量单元1、同步数据采集单元2以及声源定位处理单元3,所述传声阵列测量单元1包括阵列支架10,所述阵列支架10上安装mems麦克风11以及摄像头12,mems麦克风11采集噪声设备的声压信号,摄像头12对噪声设备进行拍照或者实时进行视频图像采集;所述mems麦克风11采集的声压信号通过同步数据采集单元2传输给声源定位处理单元3;所述摄像头12与声源定位处理单元3连接,用以将采集的图像信息传输给声源定位处理单元3;所述声源定位处理单元3对声压信号和图像信息进行处理,最终以分布图或视频图像的形式
显示定位结果。所述阵列支架10安装在可调节式三脚架13上,所述摄像头12安装在阵列支架10的中心。所述mems麦克风11设置有64个,64个mems麦克风11按照质数螺旋阵形安装在阵列支架10上,此阵形具有抗空域混叠的性能和较好的旁瓣抑制能力,且mems麦克风具备成本低、便捷性好等优点。所述mems麦克风11和同步数据采集单元2有线连接。
29.所述声源定位处理单元3采用安装有声像仪软件的计算机。
30.如图2所述,本实例所述的基于mems麦克风的声像仪系统,其具体定位流程为:
31.利用64个mems麦克风采集噪声信号数据并传输给同步数据采集单元2。
32.摄像头进行同步的图像采集并传输给声源定位处理单元3的计算机。
33.同步数据采集单元2对采集到的声信号进行初步处理并将处理后的数据传输给声源定位处理单元3的计算机。
34.在声源定位处理单元3声像仪软件中通过声源定位后处理算法将获取的噪声源中的声信息以色阶图成像与摄像机采集的图像进行叠加从而确定设备噪声源的分布图,实现对噪声源的可视化定位。
35.如图3所述,本实例所述的声源定位处理单元3,其共有音频处理模块、视频校准模块、离线噪声源检测模块、定位模块、硬件配置模块五个模块。
36.音频处理模块:可以实现所有通道的音频信号可视化,也可以实现单通道的音频信号可视化,显示该通道信号的波形和频谱。也可以对特定的多个通道进行信号的叠加和对比。
37.视频校准模块:通过对摄像头拍摄的图片进行分析,修正其水平平移,垂直平移,旋转角等参数,修正视频模块的数据。
38.离线噪声源检测模块:通过将该系统采集的视频文件和音频文件(bin文件)相结合,采用离线噪声源定位的方式复现对应时刻的声像图。
39.定位模块:软件有算法切换功能,可在cbf、srp等多种算法中进行切换;具备动态范围选择功能,可以由用户选择需要成像的动态范围;同时还具有频率带选择功能,可以由用户自己选择感兴趣的频率带,并针对该频率带内的声信号进行计算。
40.硬件配置模块:可以设置所有通道麦克风的灵敏度和修正系数,以及该通道摄像头的开启/关闭状态。当某通道的麦克风损坏时,可以将该通道的麦克风关闭,算法就不会调用该通道麦克风的数据;可以预留设置多个摄像头的参数(水平视角,垂直视角,水平灵敏度,垂直灵敏度),便于系统更换摄像头。
41.最后应当说明的是:以上实施例仅用以说明本发明的技术方案而非对其限制,尽管参照上述实施例对本发明进行了详细的说明,所属领域的普通技术人员应当理解:依然可以对本发明的具体实施方式进行修改或者等同替换,而未脱离本发明精神和范围的任何修改或者等同替换,其均应涵盖在本发明的权利要求保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1