微波驱动的FMCW激光雷达探测装置及其探测方法与流程
微波驱动的fmcw激光雷达探测装置及其探测方法
技术领域
1.本发明涉及激光雷达探测技术领域,具体是是一种微波驱动的调频连续波(frequency modulated continuous wave,以下简称fmcw)激光雷达探测装置及其探测方法。
背景技术:
2.fmcw激光雷达具有探测距离远,抗干扰、不需要高峰值功率等优点。同时,基带fmcw激光雷达采用光学相干探测,可以极大提高接收机的灵敏度。但是基带fmcw激光雷达需要使用窄线宽、高波长调谐精度的激光器,以实现高精度的激光雷达探测。
3.公开号cn107505626b的专利文献公开了一种基于双边带调制的激光测量方法及装置,采用本振信号和两个边带(探测光)进行混频探测。但由于两个边带和本振信号同时混频,会产生信号抖动(jitter),导致探测不精确。文献《dual-sideband linear fmcw lidar with homodyne detection for application in 3d imaging》产生的双边带信号没有载波抑制,会产生信号抖动(jitter),导致探测不精确。
技术实现要素:
4.本发明的目的是要解决高波长调谐精度的激光器的技术问题,提供一种微波驱动的fmcw激光雷达,通过稳定的微波信号对光信号进行驱动,获取载波抑制双边带分离的线性调频信号,结合电频率合成技术,精确控制微波信号频率及光波频率,提高探测精度。
5.本发明的技术解决方案如下:
6.一方面,本发明提供一种微波驱动的fmcw激光雷达探测装置,其特点在于,包括:激光器、微波调制线性调频模块、收发装置和混频探测模块;
7.所述激光器用于输出光信号;所述微波调制线性调频模块用于调制所述光信号进产生载波抑制边带分离的线性调频信号,其中,一侧边带信号作为探测光信号,另一侧边带信号作为本振光信号;所述收发装置用于将所述探测光信号向待探测物体发射,并接收待探测物体反射的回波光信号;所述混频探测模块用于将所述回波光信号与本振光信号混频探测,获得待探测物体的距离和径向速度。
8.进一步,两个边带信号频率差为边带信号和载波信号频率和的两倍。
9.两个边带信号的相位相反。
10.所述待探测物体的距离r和径向速度vr,公式如下:
[0011][0012][0013]
式中,t为所述线性调频信号的周期,δf0为所述线性调频信号的频率振幅,δf1和δf2分别为前半周期的频差和后半周期的频差。
[0014]
优选的,所述微波调制线性调频模块,包括:马赫曾德调制器和分束器;从所述的激光器发出的光信号经分束器分束后,分别进入所述的马赫曾德调制器;通过给所述的马赫曾德调制器两臂上的电光调制器加载微波信号进行调制,产生两路载波抑制双边带线性调频信号,且两路载波抑制双边带线性调频信号中一侧边带相位相反;两路载波抑制双边带线性调频信号经分束器分为两路单边带线性调频信号。
[0015]
优选的,所述微波调制线性调频模块,包括:电光调制器、相位调制器和分束器;
[0016]
从所述的激光器发出的光信号经分束器分为二路光信号,其中一路光信号经分束器再次分为二路,并均电光调制器调制,形成二路边带相位相反的载波单边带线性调频信号,与另一路光信号经相位调制器交叉调制,形成二路载波抑制边带分离的线性调频信号。
[0017]
优选的,所述的混频探测模块包括多模干涉器(mmi)或定向耦合器(dc)和平衡光电探测器(bpd),所述的本振光信号和和回波光信号输入所述的多模干涉器(mmi)或定向耦合器(dc),在所述的多模干涉器(mmi)或定向耦合器(dc)的输出方向是所述的平衡光电探测器(bpd),经所述的平衡光电探测器(bpd)转换后输出混频电信号。
[0018]
另一方面,本发明还提供一种微波驱动的fmcw激光雷达探测方法,其特点在于,包括:
[0019]
对光信号调制产生载波抑制边带分离的线性调频信号,其中,一侧边带信号作为探测光信号,另一侧边带信号作为本振光信号;
[0020]
向待探测物体发射探测光信号;
[0021]
接收待探测物体反射的回波光信号;
[0022]
将所述本振光信号与回波光信号混频,获得待探测物体的距离和径向速度。
[0023]
进一步,所述探测光信号与所述本振光信号为单边带线性调频信号,且二者的边带相位相反。
[0024]
与现有技术相比,本发明的有益效果如下:
[0025]
1)利用两边带分离、混频,避免信号抖动造成的探测误差;
[0026]
2)采用电频率合成技术,精确控制微波信号频率,通过稳定的微波信号对光信号进行驱动,控制光波频率,提高探测精度。
[0027]
3)采用一个边带发射,另一个边带作为本振,提高了能量利用效率,且不不需要使用窄线宽的滤波器,降低硬件需求。
附图说明
[0028]
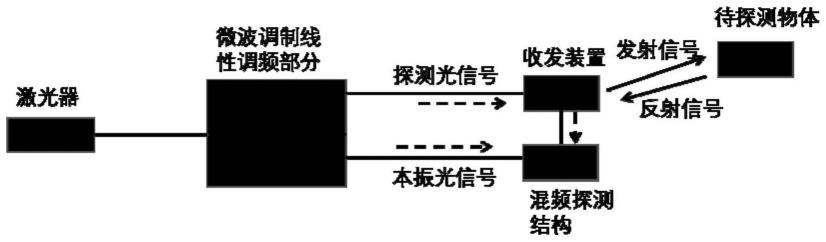
图1是本发明微波驱动的fmcw激光雷达的原理图;
[0029]
图2是本发明中回波光信号和本振光信号于混频探测模块上的显示图;
[0030]
图3是马赫曾德调制器的典型结构示意图,其中,a为多模干涉器(mmi),b为定向耦合器(dc);
[0031]
图4是本发明微波驱动的fmcw激光雷达实施例1的结构示意图
[0032]
图5是实施例1中各阶段信号的光谱图;
[0033]
图6是本发明中混频探测模块实施例1的示意图
[0034]
图7是本发明微波驱动的fmcw激光雷达实施例2的结构示意;
[0035]
图8是实施例2中各阶段信号的光谱图;
[0036]
图9是本发明中混频探测模块实施例2的示意图。
具体实施方式
[0037]
为了使本技术领域的人员更好地理解本发明方案,下面结合附图和具体实施方式对本发明作进一步的详细说明。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0038]
本技术的说明书和权利要求书及上述附图中的术语“第一”、“第二”、“第三”“第四”等是用于区别不同的对象,而不是用于描述特定的顺序。此外术语“包括”和“具有”以及他们任何变形,意图在于覆盖不排他的包含。例如包含了一系列步骤或单元的过程、方法、系统、产品或设备没有限定于已列出的步骤或单元,而是可包括没有列出的步骤或单元。
[0039]
先请参阅图1和图2,图1是本发明微波驱动的fmcw激光雷达的原理图,图中虚线代表光信号在线路中的传播方向。图2是本发明中回波光信号和本振光信号于混频探测模块上的显示图。如图所示,一种微波驱动的fmcw激光雷达,包括激光器、微波线性调频模块、收发装置和混频探测模块。沿所述的激光器的光信号输出方向是所述的微波线性调频模块,该微波线性调频模块对从所述的激光器输入的光信号进行调制,形成载波抑制边带分离的线性调频信号,一侧边带信号作为探测光信号,另一侧边带信号作为本振光信号。
[0040]
在所述的微波线性调频模块输出的本振光信号方向是所述的混频探测模块,在所述的微波线性调频模块输出的探测光信号方向是所述的收发装置,该收发装置将所述的探测光信号发出,经待探测物体反射形成回波光信号,该回波光信号由所述的收发装置接收后输入所述的混频探测模块,所述的回波光信号和本振光信号在所述的混频探测模块进行混频探测,得到所述的待测物体的距离r和径向速度vr信息如下:
[0041][0042][0043]
其中,t为线性调频信号的周期,δf0为线性调频信号的频率振幅,δf1和δf2分别为前半周期的频差和后半周期的频差;
[0044]
所述的待测物体的方向由所述的收发装置发射信号的方向确定。
[0045]
实施例1
[0046]
边带和边带分离方式:以两个边带作为本振光信号和探测信号,强度相近,且两个边带信号频率差为边带和载波信号的两倍,测量更为准确。
[0047]
如图4所示,激光器发出的光信号通过第一分束器1分成两部分,称为第一部分和第二部分:
[0048]
第一部分光信号通过第二分束器2分为第三部分和第四部分;其中,第三部分光信号与第一射频信号进入第一马赫曾德调制器(mach-zehnder modulator,以下缩写为mzm),该第一mzm1的第一输出端口连接第一探测器1以监控输出功率,该第一mzm1的第二输出端口输出第一调制光信号,如图4和图5中a处所示,本发明实施例提供的光谱图的横轴代表波长,纵轴代表光强,第一调制光信号的光谱包括载波和两个边带。第四部分光信号经过第一
相位调制器1后与第一光信号发生干涉,形成第二调制光信号,第二调制光信号的光谱包括两个边带,如图4和图5中b处所示。
[0049]
第二mzm2根据第二射频信号调制第二部分光信号,一路输出载波信号输入第二探测器2,监控输出功率;另一路输出边带信号经第二相位调制器2形成第三调制光信号,第三调制光信号的光谱包括两个边带,如图4和图5中c处所示,且其中一个边带与第二调制光信号的一个边带相位相反。
[0050]
所述第二光信号与第三光信号干涉经第八分束器8,输出第一线性调频信号和第二线性调频信号。第一线性调频信号的光谱包括一个边带,如图4和图5中d处所示。将第一线性调频信号作为探测光信号通过发射装置向待探测物体发射。第二线性调频信号的光谱包括一个边带,且该边带与第一线性调频信号的边带相位相反,如图4和图5中e处所示。将第二线性调频信号作为本振光信号与由接收装置接收的待探测物体的回波光信号经混频探测模块进行混频,得到待探测物体的距离和速度信息。发射装置和接收装置可以单独设置,也可以集成在一起。
[0051]
混频探测模块如图6所示,包括多模干涉器mmi或定向耦合器dc和平衡光电探测器bpd,本振光信号和回波光信号输入多模干涉器mmi或定向耦合器dc,在所述的多模干涉器mmi或定向耦合器dc的输出方向是所述的平衡光电探测器bpd,利用mmi或者dc进行混频,再通过bpd转化为混频电信号,得到待探测物体的空间位置和速度信息。
[0052]
实施例2
[0053]
同样采用边带和边带分离的方法,且微波信号只需要加载到两个光电相位调制器上,不需要加载在两个mzm的两臂。
[0054]
如图7所示,激光器发出的光信号通过第一分束器1分成两部分,称为第一部分光信号和第二部分光信号:
[0055]
第一部分光信号通过第二分束器2分为两部分,称第三部分光信号和第四部分光信号;其中,第一电光相位调制器1根据第一射频信号对第三部分光信号进行调制,输出第一调制光信号,该第一调制光信号的光谱包括载波和两个相位相反的边带,如图7和图8中a处所示。所述第一调制光信号再经第一相位调制器1调制后,输出相位变化后的第二调制光信号,如图7和图8中b处所示。第二电光相位调制器2根据第二射频信号对第四部分光信号进行调制,输出第三调制光信号,该第二调制光信号的光谱包括载波和两个边带,且两个边带的相位与第二调制光信号中一个边带的相位相同,如图7和图8中c处所示。第二调制光信号和第三调制光信号经第三分束器3发生干涉,该第三分束器3的第一输出端输出第四光信号(如图7和图8中d处所示),第三分束器3的第二输出端输出第五光信号(如图7和图8中e处所示)。
[0056]
第二部分光信号经过第四分束器4分为第五和第六部分;其中,第五部分光信号与由第四光信号经第一相位调制器1调制后的光信号进行干涉并经第五分束器分离输出载波抑制一侧边带的线性调频信号(如图7和图8中f处所示),作为探测光信号;第六部分光信号经第二相位调制器2调制后的光信号与第五光信号干涉混合,经第六分束器6分离输出另一侧边带的线性调频信号(如图7和图8中g处所示),作为本振光信号。探测光信号通过收发装置向待探测物体发射出去,经待探测物体反射的回波光信号由收发装置接收后,输入混频探测模块,与本振光信号进行差频,得到待探测物体距离和速度信号。
[0057]
混频探测模块如图9所示,包括双偏振光学混波器oh、第一平衡光电探测器bpd1、第二平衡光电探测器bpd2、电加法和电频率混合器。所述的本振光信号和回波光信号输入所述的双偏振光学混波器oh进行iq混频,再分别通过第一平衡光电探测器bpd1、第二平衡光电探测器bpd2将混频的光信号分别转化为电信号,将从第一平衡光电探测器bpd1、第二平衡光电探测器bpd2输出的电信号通过所述的电加法器相加获得的电信号,再与本振电信号利用所述的电频率混合器mixer进行电混频后输出混频电信号,得到待探测物体的空间位置和速度信息。
[0058]
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1