一种智能水下安全自动化采矿实验装置
1.本发明涉及水下矿物实验技术领域,具体为一种智能水下安全自动化采矿实验装置。
背景技术:
2.海洋是地球最大的资源库,在海底的深处存在各类稀有矿石和珍贵资源,因此海洋的勘探与开采就成了人类解决能源问题的途径之一。此外,不仅仅是海底内部有着矿物资源,海洋分流的大型江河与湖泊底端也是较大的资源库,采集与勘探这类水下资源通常需要使用实验类水下采矿勘探车进行工作。
3.但是现有的水下采矿实验车在安全性方面有所不足,在水底的恶劣环境下如果需要水下实验需要研究人员跟随设备潜入水底,增加了发生事故的风险,同时发生事故后检测数据容易丢失。
4.基于上述,需要设计一种智能水下安全自动化采矿实验装置来解决上述问题。
技术实现要素:
5.本发明的目的在于提供一种智能水下安全自动化采矿实验装置,以解决上述背景技术中提出的现有的水下采矿实验车在安全性方面有所不足,在水底的恶劣环境下如果需要水下实验需要研究人员跟随设备潜入水底,增加了发生事故的风险,同时发生事故后检测数据容易丢失的问题。
6.为实现上述目的,本发明提供如下技术方案:一种智能水下安全自动化采矿实验装置,包括装置中控室,所述装置中控室的一侧设置有总滑动杆,所述总滑动杆上滑动安装有滑块,所述滑块的一侧活动安装有一级机械臂,所述一级机械臂的一侧活动安装有二级机械臂,所述二级机械臂的一侧设置有尖锐矿夹;远程通讯室,所述远程通讯室内部设置有中控处理器,所述远程通讯室的顶端设置有摄像头底座,所述摄像头底座的顶端活动设置有全景摄像头,所述全景摄像头的抗水压性能较好,所述全景摄像头内部设置有夜视仪,所述装置中控室上开设有矿物水下实验舱,所述矿物水下实验舱的顶端设置有矿物入口,所述矿物水下实验舱延伸至装置中控室上部的两侧开设有压力放水泵,所述矿物水下实验舱的内部顶端设置有实验舱门。
7.优选的,所述远程通讯室的一侧设置有信号放大器,所述信号放大器和远程通讯室内部的cpu相连,所述远程通讯室上设置有四个强光灯。
8.优选的,所述二级机械臂的一侧安装有旋转电机,所述旋转电机的一侧与尖锐矿夹的另一侧相连接,所述尖锐矿夹闭合的形状为尖刺状。
9.优选的,所述装置中控室的内部设置有内部电源,所述内部电源的一侧电联有数据分析器,所述数据分析器的一侧电联有硬盘保护器,所述硬盘保护器的一侧电联有x光检测器,所述矿物水下实验舱靠近x光检测器的一侧设置有高强度玻璃。
10.优选的,所述装置中控室的一侧设置有发动机,所述发动机的一侧设置有辅助推进器,所述发动机的顶端设置有方向舵,所述装置中控室的底端设置有进水室。
11.优选的,所述进水室的底端设置有安装板,所述安装板的底端设置有底盘,所述底盘的底端两侧设置有驱动轮,所述底盘上均匀设置有多个缓冲悬挂,所述缓冲悬挂上皆有弹簧,所述缓冲悬挂的底端皆设置有负重轮,所述底盘上设置有多个传动副轮,所述驱动轮、负重轮、传动副轮上皆安装套设有履带。
12.优选的,所述底盘的一侧通过铰链活动安装有支撑器,所述支撑器的底端设置有支撑板体。
13.优选的,所述装置中控室的内部设置有压力监测器,所述装置中控室的内部设置有电弹射导轨,所述电弹射导轨由内部电源供电,所述电弹射导轨上滑动安装有硬盘保护器,所述硬盘保护器的顶端安装有导轨舱门,所述硬盘保护器的内部设置有数据硬盘,所述数据硬盘的一侧设置有防水接口,所述防水接口延伸至硬盘保护器的外部,所述硬盘保护器的底端设置有推进螺旋桨,所述硬盘保护器的底端两侧设置有稳定尾翼,所述硬盘保护器的内部设置有gps定位器。
14.与现有技术相比,本发明的有益效果是:1、通过设置有远程通讯室、摄像头底座、全景摄像头,在实际使用中远程通讯室内部的中控芯片可以和通讯装置连接,一同被水面上的操作员所控制,并操作整个装置进行工作,且摄像头底座上的全景摄像头可以在摄像头底座上转动观察四周环境,全景摄像头内部的夜视仪可以在水下黑暗处提供较好的视野。通过上述结构的设置在实际使用中可以有效解决现有的水下采矿实验车在安全性方面有所不足,在水底的恶劣环境下如果需要水下实验需要研究人员跟随设备潜入水底,增加了发生事故的风险,同时发生事故后检测数据容易丢失的问题。
15.2、通过设置有信号放大器、强光灯,在实际使用中信号放大器可以放大增强远程通讯室内部的信号,减少信号断流或彻底接收不到信号的几率,且强光灯可以对装置周围提供照明,方便全景摄像头在内部夜视仪无法提供有效视野时观察四周环境。进一步通过设置有电弹射导轨、导轨舱门、硬盘保护器,在实际使用中当装置中控室内部的腔室内进水时可以尽快将硬盘保护器从电弹射导轨上发射出去,保护硬盘保护器内部的数据硬盘和数据硬盘内部实验数据的安全。
附图说明
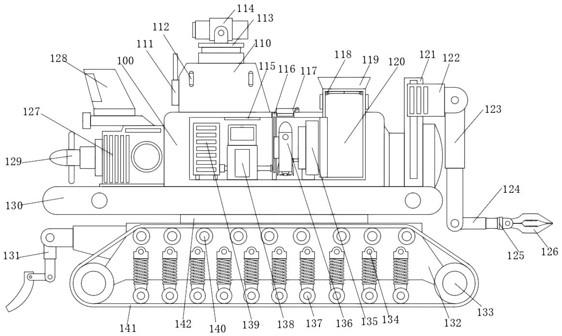
16.图1为本发明的结构侧视剖面示意图;图2为本发明的结构侧视示意图;图3为本发明的部分结构侧视示意图;图4为本发明的部分结构侧视放大示意图;图5为本发明的部分结构侧视示意图;图6为本发明的部分结构剖面放大示意图。
17.图中:100、装置中控室;110、远程通讯室;111、信号放大器;112、强光灯;113、摄像头底座;114、全景摄像头;115、压力监测器;116、电弹射导轨;117、导轨舱门;118、实验舱门;119、矿物入口;120、矿物水下实验舱;121、总滑动杆;122、滑块;123、一级机械臂;124、
二级机械臂;125、旋转电机;126、尖锐矿夹;127、发动机;128、方向舵;129、辅助推进器;130、进水室;131、支撑器;132、底盘;133、驱动轮;134、缓冲悬挂;135、x光检测器;136、硬盘保护器;137、负重轮;138、数据分析器;139、内部电源;140、传动副轮;141、履带;142、安装板;143、gps定位器;144、数据硬盘;145、防水接口;146、推进螺旋桨;147、稳定尾翼。
具体实施方式
18.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
19.请参阅图1-6,本发明提供的一种实施例:一种智能水下安全自动化采矿实验装置,包括装置中控室100,本技术中使用的所有用电器均为市场上可直接购买到的产品,其原理和连接方式均为本领域技术人员熟知的现有技术,故在此不再赘述,装置中控室100的一侧设置有总滑动杆121,总滑动杆121上滑动安装有滑块122,滑块122的一侧活动安装有一级机械臂123,一级机械臂123的一侧活动安装有二级机械臂124,二级机械臂124的一侧设置有尖锐矿夹126;远程通讯室110,远程通讯室110内部设置有中控处理器,远程通讯室110的顶端设置有摄像头底座113,摄像头底座113的顶端活动设置有全景摄像头114,全景摄像头114的抗水压性能较好,全景摄像头114内部设置有夜视仪,装置中控室100上开设有矿物水下实验舱120,矿物水下实验舱120的顶端设置有矿物入口119,矿物水下实验舱120延伸至装置中控室100上部的两侧开设有压力放水泵,矿物水下实验舱120的内部顶端设置有实验舱门118。通过上述结构的设置在实际使用中可以有效解决现有的水下采矿实验车在安全性方面有所不足,在水底的恶劣环境下,如果只凭计算机ai的操作,容易迷失路径和方向导致装置损坏,分析水下实验数据丢失的问题。
20.远程通讯室110的一侧设置有信号放大器111,信号放大器111和远程通讯室110内部的cpu相连,远程通讯室110上设置有四个强光灯112。通过上述结构的设置,在实际使用中信号放大器111可以放大增强远程通讯室110内部的信号,减少信号断流或彻底接收不到信号的几率,且强光灯112可以对装置周围提供照明,方便全景摄像头114在内部夜视仪无法提供有效视野时观察四周环境。
21.二级机械臂124的一侧安装有旋转电机125,旋转电机125的一侧与尖锐矿夹126的另一侧相连接,尖锐矿夹126闭合的形状为尖刺状。通过上述结构的设置在实际使用中遇到较为坚硬的矿石群时可以使用上述结构来进行打洞钻洞,便于将矿石打碎后收集样本进行实验检测。
22.装置中控室100的内部设置有内部电源139,内部电源139的一侧电联有数据分析器138,数据分析器138的一侧电联有硬盘保护器136,硬盘保护器136的一侧电联有x光检测器135,矿物水下实验舱120靠近x光检测器135的一侧设置有高强度玻璃。通过上述结构的设置在实际使用中可以直接将采矿采集到的岩石样本送入矿物水下实验舱120内部进行x光透视和水下应力检测,免去了工作人员需要在水下进行的一些操作,避免工作人员在水下发生危险无法及时救援。
23.装置中控室100的一侧设置有发动机127,发动机127的一侧设置有辅助推进器129,发动机127的顶端设置有方向舵128,装置中控室100的底端设置有进水室130。通过上述结构的设置在实际使用中可以额外的为装置提供一个动力源,进水室130在内部水被排空时可以带着装置漂浮。同时可以让工作人员操作装置在水中漂浮未落底时运动,增大了用户的操作便捷性。
24.进水室130的底端设置有安装板142,安装板142的底端设置有底盘132,底盘132的底端两侧设置有驱动轮133,底盘132上均匀设置有多个缓冲悬挂134,缓冲悬挂134上皆有弹簧,缓冲悬挂134的底端皆设置有负重轮137,底盘132上设置有多个传动副轮140,驱动轮133、负重轮137、传动副轮140上皆安装套设有履带141。通过上述结构的设置在实际使用中可以有效增强装置在水底行进时的越野能力,同时缓冲悬挂134带有减震效果,进一步增大了装置的稳定性。
25.底盘132的一侧通过铰链活动安装有支撑器131,支撑器131的底端设置有支撑板体。通过上述结构的设置在实际使用中,当装置行进并遇到障碍物无法继续推进时,可以使用支撑器131来撑起整个装置的后部,方便装置跨越障碍物继续前进。
26.装置中控室100的内部设置有压力监测器115,装置中控室100的内部设置有电弹射导轨116,电弹射导轨116由内部电源139供电,电弹射导轨116上滑动安装有硬盘保护器136,硬盘保护器136的顶端安装有导轨舱门117,硬盘保护器136的内部设置有数据硬盘144,数据硬盘144的一侧设置有防水接口145,防水接口145延伸至硬盘保护器136的外部,硬盘保护器136的底端设置有推进螺旋桨146,硬盘保护器136的底端两侧设置有稳定尾翼147,硬盘保护器136的内部设置有gps定位器143。通过上述结构的设置,在实际使用中,当装置出现意外危险,并已经无法回收时,可以使硬盘保护器136带着内部的数据硬盘144逃离装置,导轨舱门117首先打开,而后硬盘保护器136可在电弹射导轨116上通过电弹射导轨116内部的电源获得电磁加速,同时硬盘保护器136底端的推进螺旋桨146也会提供一个向上的力,使硬盘保护器136快速冲出装置中控室100内部并远离装置中控室100,直到硬盘保护器136内部的电源耗尽,如果硬盘保护器136内部的电源能量足够,可以使硬盘保护器136带着数据硬盘144冲至水面并漂浮,而后用户则可通过gps定位器143定位硬盘保护器136并回收硬盘保护器136,则可以回收硬盘保护器136内部的数据硬盘144和数据硬盘144内部的宝贵实验数据。
27.工作原理:在实际使用中首先把装置放入水面上,用遥控器启动进水室130上的进水阀,进水室130内部会进水从而带动装置缓慢下沉,直到装置彻底进入水内,而后用户随着装置的下沉利用方向舵128和辅助推进器129在水内改变方向,同时借助强光灯112散发的光来观察水下情况寻找合适的着落点,落地后可以使用底部的行走装置探矿,找到矿后先将尖锐矿夹126闭合并旋转尖锐矿夹126来进行打孔,并打开实验舱门118,并将打碎的矿石样本通过矿物入口119放入矿物水下实验舱120内部,此时用户则可以启动x光检测器135和数据分析器138来对矿石样本进行测量实验,并得到矿石样本的内部扫描数据和水下受到压力的数据,并将数据存储在硬盘保护器136内部的数据硬盘144中。
28.当装置在水底的崎岖路面上行驶时,难免会碰到一些障碍物无法跨越,此时用户需要远程遥控将支撑器131和支撑器131底端连接的支撑板体放下,并使支撑板体支撑起整个装置的后部,因此可以使装置的后部悬空,同时驱动轮133会持续驱动履带141前进,此时
则可以跨越障碍物继续前进。同时在跨越障碍物时难免会晃动,因此缓冲悬挂134的弹簧则可以减少震动,避免装置倾覆。
29.当实验装置在水底出现故障无法回收时,需要立即打开导轨舱门117,并启动电弹射导轨116的电磁加速,使硬盘保护器136迅速离开装置并冲向水面,硬盘保护器136内部的电源容量应当保证硬盘保护器136可以进行较远距离的水底冲刺。当硬盘保护器136冲向水面并浮出来后,用户可以通过硬盘保护器136内部安装的gps定位器143来进行定位查找,并回收硬盘保护器136和硬盘保护器136内部的数据硬盘144,这样用户尽管无法回收装置,但是能保住更为珍贵的实验数据。
30.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1