高度测定装置的制作方法
1.本公开涉及一种高度测定装置。
背景技术:
2.以往,已知有测定高度的高度测定装置。某些高度测定装置通过下述(1)式所示的高度计算公式来计算高度。
3.[数式1]
[0004][0005]
其中,h:高度[m]、p0:海平面气压[hpa]、p:当前位置的大气压[hpa]、t:气温[℃]
[0006]
所述(1)式中的大气压p可以使用当前位置的气压传感器的测定值(气压传感器例如公开在专利文献1中)。
[0007]
[背景技术文献]
[0008]
[专利文献]
[0009]
[专利文献1]日本专利特开2019-125675号公报
技术实现要素:
[0010]
[发明要解决的问题]
[0011]
然而,使用所述(1)式计算高度时,有运算负荷大的问题。另外,高度测定时难以获取准确的海平面气压p0,高度的计算精度存在问题。
[0012]
鉴于所述状况,本公开的目的在于提供一种能够抑制运算负荷并且使测定精度良好的高度测定装置。
[0013]
[解决问题的技术手段]
[0014]
例如,本公开的高度测定装置构成为具有:
[0015]
气压传感器;及
[0016]
运算部,获取电源接通时由所述气压传感器测定的大气压测定值作为大气压初始值,逐次计算所述气压传感器所测定的大气压测定值的变化量,基于所述大气压初始值与所述大气压测定值的变化量而逐次计算高度变化量,基于所述高度变化量的累积而计算高度。
[0017]
[发明的效果]
[0018]
根据本公开的高度测定装置,能够抑制运算负荷并且使测定精度良好。
附图说明
[0019]
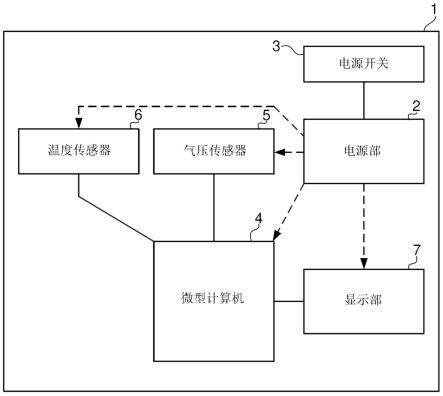
图1是表示第1实施方式的高度测定装置的构成的框图。
[0020]
图2是与第1实施方式的高度测定处理相关的流程图。
[0021]
图3是表示第2实施方式的高度测定装置的构成的框图。
[0022]
图4是与第2实施方式的高度测定处理相关的流程图。
[0023]
图5是表示第3实施方式的高度测定装置的构成的框图。
[0024]
图6是与第3实施方式的高度测定处理相关的流程图。
[0025]
图7是表示随时间经过的高度的计算结果的一例的图。
[0026]
图8是表示第3实施方式的变化例的高度测定装置的构成的框图。
[0027]
图9是用于说明第3实施方式的变化例的效果的图。
具体实施方式
[0028]
以下,参照附图对例示性实施方式进行说明。
[0029]
<1.第1实施方式>
[0030]
图1是表示第1实施方式的高度测定装置的构成的框图。图1所示的高度测定装置1具有电源部2、电源开关3、微型计算机4、气压传感器5、温度传感器6、及显示部7。高度测定装置1例如成为可以由使用者携带的构成。
[0031]
电源部2具有电池(未图示)、及从该电池供给电力的电源电路(未图示)。从电源电路供给的电力如图1中虚线所示,被供给至高度测定装置1的各部。
[0032]
电源开关3是用于切换电源部2的电力供给的接通/断开、即高度测定装置1的电源接通/断开的开关。
[0033]
微型计算机4是构成为能够实施下述高度测定处理的运算部。
[0034]
气压传感器5是用于测定大气压的传感器,例如由压阻方式的气压传感器构成。压阻方式的气压传感器由mems(micro electro mechanical system,微机电系统)构成,所述mems(micro electro mechanical system,微机电系统)将si单晶板作为隔膜,使杂质在该隔膜的表面上扩散而形成电阻电桥电路。气压传感器5的测定结果用于高度测定处理。
[0035]
温度传感器6是用于测定气温的传感器,例如由热敏电阻等构成。温度传感器6的测定结果用于高度测定处理。
[0036]
显示部7构成为能够显示微型计算机4所测定出的高度,例如由液晶显示部构成。
[0037]
对这种构成的第1实施方式的高度测定装置1所进行的高度测定处理加以说明。此处,在本实施方式的高度测定处理中,使用如下述(2)式所示的计算公式来计算高度。(2)式由所述(1)式导出。
[0038]
[数式2]
[0039][0040]
其中,δh:高度的变化量[m]
[0041]
p0:电源接通时的大气压测定值(大气压初始值)[hpa]
[0042]
δp:以p0为初始值的本次大气压测定值与上一次大气压测定值的变化量[hpa]
[0043]
t:气温的测定值[℃]
[0044]
可以通过将由所述(2)式计算出的δh逐次与高度h的初始值累积相加来计算高度
h。此外,高度h的初始值例如设为0。
[0045]
参照图2所示的流程图对具体的高度测定处理进行说明。当通过电源开关3接通电源时,开始图2所示的处理。于是,在步骤s1中,微型计算机4获取气压传感器5的大气压测定结果作为所述(2)式中的p0(大气压初始值)。
[0046]
然后,进入步骤s2,微型计算机4计算利用气压传感器5获得的当前大气压测定值相对于上一次步骤s2中的测定值的变化量,并根据计算结果更新所述(2)式中的δp。其中,电源接通时的第一次是将当前大气压测定值设为p0而δp=p0-p0=0。在该情况下,通过下述步骤s3中的计算而得出δh=0。
[0047]
接着,在步骤s3中,微型计算机4基于p0、δp的值与温度传感器6的测定值(t),使用所述(2)式计算δh。微型计算机4通过将本次计算出的δh与上一次的高度h的计算值相加而计算高度h。其中,第一次是设为上一次的高度h=高度h的初始值来计算高度h。由此,测定当前的高度h。此外,通过设为高度h的初始值=0,能够测定以电源接通时为基准的相对高度。
[0048]
在步骤s3之后,返回到步骤s2。通过反复实施步骤s2与s3,而逐次更新δp,逐次计算δh,从而逐次计算高度h。
[0049]
根据这种本实施方式,由于使用所述(2)式计算高度h,所以能够抑制运算负荷。因此,能够使用运算能力得到抑制的微型计算机4,这在成本等方面有利。另外,由于将电源接通时的大气压测定值设为p0而用于计算,所以,能够根据测定高度h时的环境进行运算,从而能够使高度h的测定精度良好。
[0050]
<2.第2实施方式>
[0051]
图3是表示第2实施方式的高度测定装置的构成的框图。图3所示的高度测定装置1的与所述第1实施方式(图1)的构成的不同点在于具有操作部8。
[0052]
操作部8是用于进行更新所述(2)式中的p0(大气压初始值)的规定操作的构成。所述规定操作例如可以是按下构成为硬件的按钮,或者,也可以是显示部7中的触摸面板上的操作。
[0053]
图4是表示第2实施方式的高度测定装置1中的高度测定处理的流程图。图4所示的高度测定处理包括包含步骤s11~s15的主处理m、及包含步骤s21的子处理sub。
[0054]
当通过电源开关3接通电源时,开始图4所示的主处理m。于是,在步骤s11中,微型计算机4获取气压传感器5的大气压测定结果作为所述(2)式中的p0(大气压初始值)。
[0055]
然后,在步骤s12中,微型计算机4判定是否更新p0。
[0056]
此处,在操作部8中进行了所述规定操作时,开始子处理sub。于是,在步骤s21中,微型计算机4获取气压传感器5的大气压测定结果作为所述(2)式中的p0。获取后,子处理sub完成(结束)。每当进行所述规定操作时,便实施子处理sub。
[0057]
在步骤s12中,微型计算机4确认是否通过子处理sub重新获取p0,已获取时必须进行更新(步骤s12的是),进入步骤s13,微型计算机4将p0更新为步骤s21中所获取的值。在步骤s13之后,进入下述步骤s14。另一方面,在步骤s12中,未通过子处理sub获取p0时,无须更新(步骤s12的否),不进入步骤s13,而进入下述步骤s14。
[0058]
在步骤s14中,微型计算机4计算气压传感器5的当前大气压测定值相对于上一次步骤s14中的测定值的变化量,并根据计算结果更新所述(2)式中的δp。其中,在电源接通
时的第一次或者在步骤s13中更新了p0的情况下,将当前大气压测定值设为p0而δp=p0-p0=0。在该情况下,通过下述步骤s15中的计算而得出δh=0。
[0059]
接着,在步骤s15中,微型计算机4基于p0、δp的值与温度传感器6的测定值(t),使用所述(2)式计算δh。微型计算机4通过将本次计算出的δh与上一次的高度h的计算值相加而计算高度h。其中,在第一次或者在步骤s13中更新了p0的情况下,设为上一次的高度h=高度h的初始值(=0)来计算高度h。由此,测定当前的高度h。在步骤s15之后,返回到步骤s12。
[0060]
像这样,根据本实施方式,可以通过使用者所执行的所述规定操作(更新操作)来进行p0的更新及高度h的初始化。因此,通过使用者在真正想要实施高度h的测定的时点进行更新操作,能够提高高度h的测定精度。另外,能够测定以更新操作时为基准的相对高度h。
[0061]
<3.第3实施方式>
[0062]
图5是表示第3实施方式的高度测定装置1的构成的框图。图5所示的高度测定装置1的与所述第2实施方式(图3)的构成的不同点在于具有移动检测部9。
[0063]
移动检测部9构成为能够检测高度测定装置1在铅直方向(重力方向)上的移动,具有加速度传感器9a。加速度传感器9a所测定的铅直方向的加速度作为移动检测部9的检测结果而输出。
[0064]
图6是表示第3实施方式的高度测定装置1中的高度测定处理的流程图。图6所示的高度测定处理除了包括与所述第2实施方式相同的主处理m及第1子处理sub1以外,还包括第2子处理sub2。
[0065]
当电源接通时开始第2子处理sub2。于是,在步骤s31中,微型计算机4获取气压传感器5的大气压测定结果作为所述(2)式中的p0。
[0066]
然后,在步骤s32中,微型计算机4基于移动检测部9的检测结果,判断高度测定装置1是否发生了高度会产生变化的铅直方向的移动,在判断为发生的情况下,判定为无须更新p0。另一方面,微型计算机4在判断为高度测定装置1未发生高度会产生变化的铅直方向的移动的情况下,判定为必须更新p0。也就是说,在步骤s32中,进行基于移动检测部9的检测结果的p0的更新判定。
[0067]
在主处理m中,在步骤s12中,微型计算机4根据步骤s32中的p0的更新判定结果来判定是否更新p0。此处,在判定为必须更新p0的情况下(步骤s12的是),进入步骤s13,微型计算机4将p0更新为步骤s31中所获取的值。在之后的步骤s14中,将当前大气压测定值设为p0而δp=p0-p0=0。因此,在之后的步骤s15中,计算出δh=0,并将δh与上一次计算出的高度h相加。因此,维持高度h的计算值。
[0068]
此处,参照图7对第1实施方式(图2)与第3实施方式(图6)的高度测定处理的高度h的计算结果的差异进行说明。图7是表示随时间经过的高度h的计算结果的一例的图。图7中表示如下例子,即,在期间t1内,因携带高度测定装置1的使用者行走而高度上升,在期间t2内,所述使用者停止行走(或者在维持高度的情况下行走),在期间t3内,因所述使用者再次行走而高度上升。
[0069]
在图7的例子中,在第1实施方式的情况下,在期间t1内成为高度h随时间经过而上升的结果(实线)。然而,在期间t2内,虽然实际上维持了高度,但受测定的大气压的噪声的
影响而高度h产生了误差(虚线)。测定的大气压的噪声例如指台风等引起的大气压变化、或者空气流动(例如室外的风或室内的空调风等)引起的大气压变化等。
[0070]
与此相对,在第3实施方式中,在期间t1内,通过在步骤s32中判断为高度测定装置1发生了高度会产生变化的铅直方向的移动而判定为无须更新p0,因此,不进入步骤s13,而高度h的计算值上升(实线)。
[0071]
然后,在期间t2内,通过在步骤s32中判断为高度测定装置1未发生高度会产生变化的铅直方向的移动而判定为必须更新p0,因此,在步骤s13中进行p0的更新,维持高度h的计算值(实线)。因此,在期间t2内,成为与高度不上升的实际状态一致的计算结果,而高度h的测定精度提高。
[0072]
然后,在期间t3内,通过在步骤s32中判断为高度测定装置1发生了高度会产生变化的铅直方向的移动而判定为无须更新p0,因此,不进入步骤s13,而高度h的计算值再次上升(实线)。
[0073]
<4.变化例>
[0074]
图8是表示所述第3实施方式的变化例的高度测定装置1的构成的框图。在图8所示的高度测定装置1中,移动检测部9除了具有加速度传感器9a以外,还具有地磁传感器9b。
[0075]
在本变化例中,在图6所示的处理中,在步骤s32中,除了考虑加速度传感器9a的检测结果以外,也考虑地磁传感器9b的检测结果,判断高度测定装置1是否发生了高度会产生变化的铅直方向的移动。
[0076]
更具体来说,在加速度传感器9a所检测出的铅直方向的加速度大致为0时,基于地磁传感器9b的检测结果而磁北的方位未产生变化或连续变化的情况下,判断为高度测定装置1未发生高度会产生变化的铅直方向的移动。另一方面,在加速度传感器9a所检测出的铅直方向的加速度大致为0时,基于地磁传感器9b的检测结果而磁北的方位不连续地变化的情况下,判断为高度测定装置1发生了高度会产生变化的铅直方向的移动。
[0077]
参照图9对这种变化例的效果进行说明。图9是示意性地表示在高楼等建筑物10中携带高度测定装置1的使用者p通过电梯11上升移动的情况的图。也就是说,使用者p的高度通过电梯11而上升。
[0078]
在该情况下,如图9所示,在建筑物10的高度方向上,从低到高依次配置加速区域r1、等速区域r2及减速区域r3。在加速区域r1及减速区域r3中,基于加速度传感器9a的检测结果,在步骤s32中判断为高度测定装置1发生了高度会产生变化的铅直方向的移动。
[0079]
另一方面,在等速区域r2中,由于加速度传感器9a所检测出的加速度大致为0,所以,如果仅根据加速度传感器9a的检测结果进行判断,就有可能错误地判断为高度测定装置1未发生高度会产生变化的铅直方向的移动。然而,在本变化例的情况下,在等速区域r2中,虽然加速度传感器9a所检测出的加速度大致为0,但受构成建筑物10的钢筋混凝土的磁化的影响而基于地磁传感器9b的检测结果的磁北的方位不连续地变化,因此,判断为高度测定装置1发生了高度会产生变化的铅直方向的移动。因此,不进行步骤s13中的p0的更新,而高度h的计算值上升。
[0080]
<5.其它>
[0081]
以上,对例示性实施方式进行了说明,但在本发明的主旨的范围内,实施方式可以进行各种变化。
[0082]
例如,在所述实施方式中,也可以不设置温度传感器6。在该情况下,在利用所述(2)式的计算中,t=规定的固定值。使用温度传感器6的测定结果作为t时,δh的计算精度提高,但在不要求精度的情况下,可以通过不设置温度传感器6来削减成本。
[0083]
<6.附注>
[0084]
如上所述,例如,本公开的高度测定装置(1)具有:
[0085]
气压传感器(5);及
[0086]
运算部(4),获取电源接通时由所述气压传感器测定的大气压测定值作为大气压初始值(p0),逐次计算所述气压传感器所测定的大气压测定值的变化量(δp),基于所述大气压初始值与所述大气压测定值的变化量而逐次计算高度变化量(δh),基于所述高度变化量的累积而计算高度(h)(第1构成)。
[0087]
另外,在所述第1构成中也可以构成为如下,即,所述运算部(4)计算电源接通时将所述高度的初始值设为0时的所述高度,所述高度是将所述高度变化量累积到所述高度的初始值上而获得(第2构成)。
[0088]
另外,在所述第1或第2构成中也可以构成为如下,即,所述运算部(4)在进行了规定操作的情况下,基于所述气压传感器(5)所测定的大气压测定值而更新所述大气压初始值(第3构成)。
[0089]
另外,在所述第3构成中也可以构成为如下,即,所述运算部(4)计算在进行了所述规定操作时将所述高度的初始值设为0时的所述高度,所述高度是将所述高度变化量累积到所述高度的初始值上而获得(第4构成)。
[0090]
另外,在所述第1至第4中的任一构成中也可以构成为如下,即,还具有构成为能够检测所述高度测定装置(1)在铅直方向上的移动的移动检测部(9),且
[0091]
所述运算部(4)基于所述移动检测部的检测结果,判定是否需要更新基于所述气压传感器(5)所测定的大气压测定值的所述大气压初始值(第5构成)。
[0092]
另外,在所述第5构成中也可以构成为如下,即,所述移动检测部(9)具有加速度传感器(9a)(第6构成)。
[0093]
另外,在所述第6构成中也可以构成为如下,即,所述移动检测部(9)还具有地磁传感器(9b),所述运算部(4)在所述加速度传感器(9a)所检测出的加速度大致为0的情况下,基于所述地磁传感器的检测结果来判定是否需要更新所述大气压初始值(第7构成)。
[0094]
另外,在所述第1至第7中的任一构成中也可以构成为如下,即,还具有温度传感器(6),所述运算部(4)除了基于所述大气压初始值与所述大气压测定值的变化量以外,还基于所述温度传感器的检测结果(t)来逐次计算所述高度变化量(第8构成)。
[0095]
另外,在所述第1至第7中的任一构成中也可以构成为如下,即,所述运算部(4)除了基于所述大气压初始值与所述大气压测定值的变化量以外,还基于设为固定值的气温(t)来逐次计算所述高度变化量(第9构成)。
[0096]
[工业上的可利用性]
[0097]
本公开的高度测定装置例如可以用于使用者能够携带的装置。
[0098]
[符号的说明]
[0099]1ꢀꢀꢀꢀ
高度测定装置
[0100]2ꢀꢀꢀꢀ
电源部
[0101]3ꢀꢀꢀꢀ
电源开关
[0102]4ꢀꢀꢀꢀ
微型计算机
[0103]5ꢀꢀꢀꢀ
气压传感器
[0104]6ꢀꢀꢀꢀ
温度传感器
[0105]7ꢀꢀꢀꢀ
显示部
[0106]8ꢀꢀꢀꢀ
操作部
[0107]9ꢀꢀꢀꢀ
移动检测部
[0108]
9a
ꢀꢀꢀ
加速度传感器
[0109]
9b
ꢀꢀꢀ
地磁传感器
[0110]
10
ꢀꢀꢀ
建筑物
[0111]
11
ꢀꢀꢀ
电梯
[0112]
p
ꢀꢀꢀꢀ
使用者
[0113]
r1
ꢀꢀꢀ
加速区域
[0114]
r2
ꢀꢀꢀ
等速区域
[0115]
r3
ꢀꢀꢀ
减速区域。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1