一种入射面自动准直定位系统及定位方法与流程
1.本发明属于光学计量技术领域,涉及一种入射面自动准直定位系统及定位方法。
背景技术:
2.随着高功率激光系统在受控热核反应、核爆模拟、高能激光武器等尖端技术上的应用,为了进一步提高输出激光的功率水平,提高激光器的输出通量,激光系统的尺寸也越来越大。透射比、反射比、光吸收系数和均匀性是评价大口径激光元件的重要特性参数,这些参数直接影响输出激光的功率及效率,对于激光系统的光束质量、系统的稳定性和损伤阈值影响很大,直接制约高功率激光技术的发展。此外这些激光器的功率非常强、持续时间长、能量非常大,激光元件的反射比、透射比、光吸收系数及均匀性对高能激光的功率、效率、光束质量、损伤阈值和系统的稳定性影响很大,研究大口径激光元件的测试技术,对高能激光武器性能的提升具有非常重要的意义。
3.大口径待测光学元件放置在光路中,激光光源对待测光学件即反射镜进行扫描测量,一般激光光源固定不动,通过平移和旋转待测件及探测组件来完成扫描测量,这样就需要保证入射面即光源入射到待测反射镜的镜面(以下简称入射面)与入射光束的垂直性及待测反射镜镜面与载物台旋转轴的重合性,我们称之为准直定位,如何降低人为操作带来的误差和不确定性,实现高精度的自动化调整,是测试仪研制的重要研究内容。
4.常规的激光元件参数测量装置只能对固定角度或一定角度范围内的激光参数进行测量。但是对激光核聚变等装置中的大口径激光元件,需要测量大角度范围内的透射比或者反射比,且激光光学元件特性参数测试仪是一台高度自动化的测量装置。必须研究大口径元件入射角度的自动定位方法和技术,以及透射角/反射角的自动定位方法和技术,以保证测量探测器“准直”接收到透射光/反射光。透反比的测量必须精确确定入射角和透射/反射角,设备要求透射比/反射比测量重复性≤5e-5
,透射比/反射比均匀性测量重复性≤5e-5
;入射角度定位精度优于0.1
°
。对于大口径的激光元件和大入射角度测量范围,如何自动精密定位入射角和透射/反射角,保证这些角度在均匀性测量过程中稳定不变,是测量仪光机设计的难点和关键技术。
5.在光学元件强激光功率损伤阈值测量中,如果入射面定位不准确,经反射后多余的强激光能量不能准确进入能量回收桶,容易对周围设备造成误伤。以前的测量设备中主要通过手动的方式进行人工调节,不易操作,测量的重复性和复现性较差,影响测量的精度。且新研发的测量设备为全自动化设备,待测件进入载物台后,测量是在全封闭状态下进行的,这样就需要入射面能够自动准直定位。
6.测试仪精密安装调试后,装载待测件的四轴载物台和探测器悬臂转台围绕同一个轴心转动。装载待测件的四轴载物台包括两个小二位电动平移台、两个弧形导轨和俯仰调节机构,可以实现待测件前后、左右、方位及俯仰位置姿态调节。同时四轴载物台放置在一个三维电动平台上,可以x轴、y轴移动和方位旋转,从而实现有一定入射角的测量。激光光源对准四轴转载台下方方位旋转轴轴心,待测件入射面的姿态和位置必须满足几何光学对
入射面和法线的准直定位要求,才能保证四轴载物台和探测器悬臂转台角度定位的精度。为实现入射角度和透反射角度的自动精密定位,需要保持待测件入射面与四轴载物台下方二维电动平移台的xy扫描面平行。入射角大于零的测量时,需要旋转待测件,这时待测件的旋转轴应与四轴载物台下方方位旋转轴轴心重合。
7.待测件的入射面如果与四轴载物台下方的二维电动平移台的xy扫描面存在夹角,装载待测件的四轴载物台从0
°
正入射角旋转到指定的入射角度时,入射光束与待测件之间的夹角就不是指定的入射角度。而且进行xy二维扫描时,即使入射光束与待测件之间的夹角不发生变化,待测元件的入射面也会相对入射测量光束发生偏移,从而造成反射光斑在探测器靶面上的移动,如图1所示。由于探测器空间响应度的变化,这种跳动造成的测量不确定度的影响在10-4
量级,严重时光斑可能会跳出探测器。
技术实现要素:
8.(一)发明目的
9.本发明的目的是:提供一种入射面自动准直定位系统及定位方法,通过该方法,使测量时入射面的定位更准确、更简洁,提高测量的重复性和复现性,为高精度测量提供技术保障,同时也减小故障发生率。
10.(二)技术方案
11.为了解决上述技术问题,本发明提供一种入射面自动准直定位系统,其包括:四轴载物台、激光光源、探测组件、超声波位移传感器和光电自准直仪,待测件即大口径反射镜安装在四轴载物台上,激光光源固定于待测件的前方,探测组件布置在待测件后方,超声波位移传感器与激光光源同侧布置,且和激光光源的距离固定不变,其高度和待测件中心相当,光电自准直仪和超声波位移传感器安装在同一个支架上;超声波位移传感器测量待测件入射面到超声波位移传感器的距离值,光电自准直仪测量待测件入射面和光源光轴的角度偏差值,根据所测得距离值和角度偏差值,调整四轴载物台,使得待测件的入射面与光电自准直仪的光轴垂直。
12.其中,所述四轴载物台包括电动平移台、旋转导轨和俯仰调节机构,实现对待测件的前后、左右、方位及俯仰运动调节。所述激光光源到待测件的距离以0度入射角入射时与探测组件不干涉为准。所述探测组件通过悬臂轴旋转到指定角度,且探测组件能够进行姿态调整。所述超声波位移传感器的高度和待测件中心相当,超声波位移传感器到待测件之间的距离设计为0.5米~1米之间。所述超声波位移传感器光轴、光电自准直仪的光轴与入射光束平行。所述超声波位移传感器测量范围大于1米,位置定位精度优于1mm。
13.其中,定位系统还包括数控系统,连接超声波位移传感器、光电自准直仪和四轴载物台;超声波位移传感器将所测得的距离值反馈数控系统,通过计算得出待测件入射面与光源的距离l,与设计距离l0取差值为δl,数控系统通过计算后将δl位移量分解为前后和左右方向的量值,反馈给四轴载物台中的电动平移台,并发出指令使电动平移台移动对应的位移量到设计位置,完成待测件位移姿态的调整;光电自准直仪将角度偏差值反馈给数控系统,数控系统通过分析计算,将角度偏差值分解为方位和俯仰方向的量值,并分别给控制方位和俯仰的电机发出相应指令使其运动到对应位置,完成待测件角度位置姿态自动调整,调整后待测件的入射面与光电自准直仪的光轴垂直,从而确定待测件的0
°
基准入射角。
14.本发明还提供一种入射面自动准直定位方法,定位过程包括以下步骤:
15.(1)将待测件安装在四轴载物台上,此时为待测件的初始位置;
16.(2)将超声波位移传感器固定在激光光源的同侧位置,其光轴和光源光轴平行;
17.(3)将光电自准直仪固定在激光光源的同侧位置,其光轴和光源光轴平行;
18.(4)开启超声波位移传感器和自准直定位仪,测量出待测件入射面到超声波传感器的距离和待测件入射面与自准直定位仪光轴的角度值;
19.(5)数控系统根据上一步得到的距离和角度值,计算出待测件初始位置与设计位置前后、左右的位移量及方位、俯仰的调节量反馈给四轴载物台中对应的电机,并发出指令使其运动到指定位置,完成待测件入射面的自动准直定位。
20.(三)有益效果
21.上述技术方案所提供的入射面自动准直定位系统及定位方法,保证了入射角度和位置定位的精度,提高了测量的重复性和复现性,为高精度自动测量提供了技术保障。
附图说明
22.图1为入射面定位不准引起的测试光斑移动图。
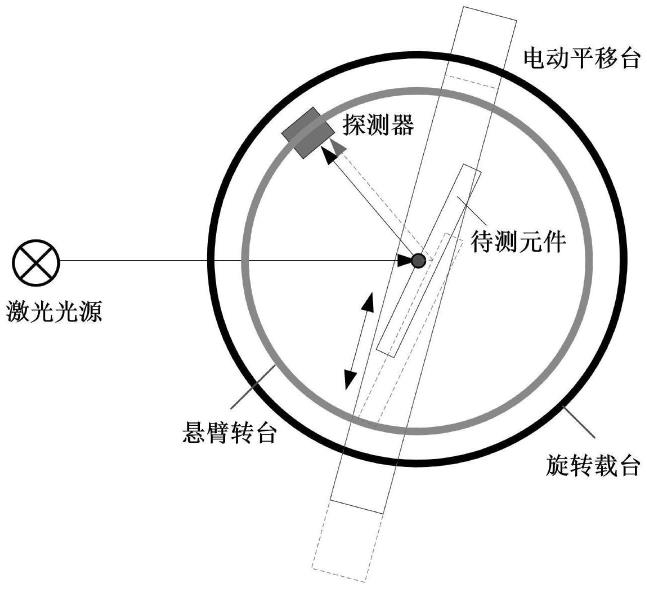
23.图2为本发明定位方法的原理图。
具体实施方式
24.为使本发明的目的、内容和优点更加清楚,下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。
25.参照图2所示,本实施例入射面自动准直定位系统包括四轴载物台、激光光源、探测组件、超声波位移传感器和光电自准直仪,待测件即大口径反射镜安装在四轴载物台上,激光光源固定于待测件的前方,探测组件布置在待测件后方,超声波位移传感器与激光光源同侧布置,且和激光光源的距离固定不变,其高度和待测件中心相当,光电自准直仪和超声波位移传感器安装在同一个支架上;超声波位移传感器测量待测件入射面到超声波位移传感器的距离值,光电自准直仪测量待测件入射面和光源光轴的角度偏差值,根据所测得距离值和角度偏差值,调整四轴载物台,使得待测件的入射面与光电自准直仪的光轴垂直。
26.其中,四轴载物台包括电动平移台、旋转导轨和俯仰调节机构,以实现前后、左右、方位及俯仰运动调节。
27.激光光源到待测件的距离以0度入射角入射时与探测组件不干涉为宜。
28.探测组件通过悬臂轴旋转到指定角度,且探测组件可以进行姿态调整。
29.超声波位移传感器和光电自准直仪固定在同一个稳定的支架上,超声波位移传感器的高度和待测件中心相当,超声波位移传感器到待测件之间的距离设计为0.5米~1米之间,超声波位移传感器光轴与入射光束平行;光电自准直仪的光轴与入射光束平行。
30.目前市面上所购能用来测距的设备多为激光测距机,但其测量范围和测量精度有限,不能满足测量需求。通过对比分析,本实施例采用一款高精度超声波位移传感器,既能满足测量范围需要,也能满足测量精度需要,且体积小、重量轻、安装操作简单,其测量范围大于1米,位置定位精度优于1mm,通过超声波位移传感器可以测量出超声波位移传感器到待测件入射面的距离。
31.本实施例定位系统还包括数控系统,连接超声波位移传感器、光电自准直仪和四轴载物台。
32.超声波位移传感器将所测得的距离值反馈数控系统,通过计算可以得出待测件入射面与光源的距离l,与设计距离l0取差值为δl,数控系统通过计算后将δl位移量分解为前后和左右方向的量值,反馈给四轴载物台中的电动平移台,并发出指令使电动平移台移动对应的位移量到设计位置,完成待测件位移姿态的调整。
33.光电自准直仪将角度偏差值反馈给数控系统,数控系统通过分析计算,将角度偏差值分解为方位和俯仰方向的量值,并分别给控制方位和俯仰的电机发出相应指令使其运动到对应位置,从而完成待测件角度位置姿态自动调整,调整后待测件的入射面与光电自准直仪的光轴垂直,从而确定待测件的0
°
基准入射角,其角度定位精度优于0.01度。
34.基于上述入射面自动准直定位系统,本实施例入射面自动准直定位方法包括以下步骤:
35.(1)将待测件安装在四轴载物台上,即为待测件的初始位置;
36.(2)将高精度超声波位移传感器固定在激光光源的同侧位置,其光轴和光源光轴平行;
37.(3)将高精度光电自准直仪固定在激光光源的同侧位置,其光轴和光源光轴平行;
38.(4)接通高精度超声波传感器和高精度自准直定位仪的电源,测量出待测件入射面到超声波传感器的距离和待测件入射面与自准直定位仪光轴的角度值;
39.(5)数控系统根据上一步得到的距离和角度值,计算出待测件初始位置与理想位置前后左右的位移量及方位、俯仰的调节量反馈给四轴载物台中对应的电机,并发出指令使其运动到指定位置,从而完成待测件入射面的自动准直定位。
40.通过上述方法,用户在进行准直定位时,实现了以下目的:
41.1,本发明可对待测件的姿态自动调整,免去了待测件入射面准直手动定位时需要打开仪器盖反复拆装的麻烦,且操作简单。
42.2,减小了手动调节时带来的定位误差。
43.3,克服了以往手动调节时带来重复性和复现性差的缺点。
44.4,避免了待测件入射面定位不准时带来的激光损伤。
45.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1