一种圆锥雷达的波束扫描方法与流程
1.本发明属于相控阵雷达技术领域,具体涉及一种圆锥雷达的波束扫描方法。
背景技术:
2.随着国家低空航空领域的逐步开放,dmx设备的应用正在快速普及,与此同时dmx设备的黑飞问题逐渐开始威胁社会公众安全,使用雷达技术对dmx目标进行有效探测在防御dmx设备上具有重要意义。
3.目前通常采用相控面阵或面阵与伺服相结合的方法对无人机等dmx目标进行探测,在探测过程中很难实现对360度全方位警情的快速响应。因此,需要发明一种全方位快速响应的低空探测雷达。
技术实现要素:
4.针对上述技术问题,本发明提供一种圆锥雷达的波束扫描方法。
5.具体的技术方案为:
6.一种圆锥雷达的波束扫描方法,波束可在方位维度和俯仰维度扫描。
7.在方位维度,雷达共有4n个tr,每个方位波束的形成需要n(大于等于12)个tr,可实现同时驻留4个波束。根据方位维度波束宽度可分为发射宽波束与发射窄波束,宽波束用于目标搜索,记为搜索波束,窄波束用于目标跟踪,记为跟踪波束,方位波束实现了360
°
全方位扫描。
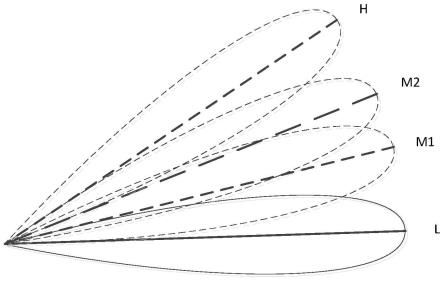
8.在俯仰维度,雷达每个tr含有m(大于等于6)个阵元,根据搜索波束的俯仰中心指向,分为4个搜索波束,记为l、m1、m2、h,跟踪波束可实现-5到+55度内任意俯仰角度的波束驻留。
9.进一步地,本发明所述雷达tr上的每个阵元均含有一个移相器,通过改变使用的tr和移相器配相值形成波束,选择使用的tr时保证以波束指向方位角为中心,左右各使用n/2个tr。宽波束相控值由波束展宽算法形成并固化在程序中,窄波束根据所需指向角实时计算,计算公式为。
[0010][0011]
式中m是列号,n是行号。各阵元的波程差可表示为:
[0012][0013]
其中θ、是待指向的方位角、俯仰角。
[0014]
是第n行的半径,可表示为:
[0015][0016]
其中是最下层天线半径,是线阵间距,由实际安装的阵列天线决定,是阵列天线的半锥角,
[0017]
为阵元方位角,可表示为:
[0018][0019]
进一步地,发射宽波束时使用5个接收波束,发射窄波束时使用2个接收波束,通过改变dbf数值形成不同指向角度的数字波束。所述雷达含有一块或多块信号采集与预处理板卡,实现模拟信号的adc、ddc与dbf处理,dbf数据经高速光纤传输至服务器进行后续雷达信号处理。
[0020]
进一步地,搜索和跟踪波束驻留时间均可根据雷达使用电磁环境灵活修改,在满足对目标探测能力的同时灵活调节搜索跟踪周期。
[0021]
进一步地,搜索波束与跟踪波束根据波束调度算法进行切换,雷达探测目标时分为tws、tas、ctt三种工作模式,tws模式下雷达使用宽波束进行目标搜索,ctt模式下雷达使用跟踪模式进行目标跟踪,tas模式下雷达进行目标搜索与目标跟踪,在跟踪完所有目标后插入若干搜索帧。tws、tas、ctt三种模式可相换切换。
[0022]
tws模式下雷达按波位编号执行搜索任务;
[0023]
ctt模式下,判断所有目标的跟踪次数规则为:
[0024]
目标个数为1个时,设置跟踪次数为1;
[0025]
目标个数为2个时,计算目标间方位角度差,大于等于90
°
时设置跟踪次数为1(2个目标同时采用不用的波束跟踪),小于90
°
时设置跟踪次数为2(2个目标需要分时采用不用的波束跟踪);
[0026]
目标个数为3个时,计算任意2目标方位角度差,都大于等于90
°
时设置跟踪次数为1(3个目标同时采用不用的波束跟踪),2个差值都大于等于90
°
时设置跟踪次数为2(2个目标同时采用不用的波束跟踪,1个目标需要分时采用不用的波束跟踪),都小于90
°
时设置跟踪次数为3(3个目标都需要分时采用不用的波束跟踪);
[0027]
目标个数为4个时,计算任意2目标方位角度差,都大于等于90
°
时设置跟踪次数为1(4个目标同时采用不用的波束跟踪),3个都大于等于90
°
时设置跟踪次数为2(3个目标同时采用不用的波束跟踪,1个目标需要分时采用不用的波束跟踪),2个都大于等于90
°
时设置跟踪次数为3(2个目标同时采用不用的波束跟踪,2个目标需要分时采用不用的波束跟踪),都小于90
°
时设置跟踪次数为4(4个目标需要分时采用不用的波束跟踪)。
[0028]
雷达的tas模式总体流程与ctt模式类似,但跟踪周期大于实际跟踪时间,并在跟踪完毕后进行若干帧扫描。主控板在接收到跟踪指令(包括跟踪目标列表、各目标的积累点数和设定跟踪周期)后,对波束进行调度和分配。主控板根据各目标所处的俯仰角、方位角、积累点数确定同时跟踪的目标,将对各目标的跟踪排列成若干跟踪帧,并计算出完成所有目标跟踪所需的时间。此时设定跟踪周期应大于下一次跟踪时间。用设定跟踪周期减去实际跟踪时间得到扫描时间,将扫描帧排列在扫描时间中,计算出下一次跟踪时间(保证最后扫描帧结束时,实际tas时间小于等于跟踪周期)。得到下一次跟踪时间后,向显控软件发送。
[0029]
与现有技术相比,本发明具有的优点如下:
[0030]
可同时进行多波束、多角度的搜索与跟踪;
[0031]
天线阵列为圆锥形,在保留能对地面目标探测的同时具备更高的仰角探测能力;
[0032]
不同仰角搜索波形和波束驻留时间不同,驻留时间可以灵活调节,对不同使用环境可以灵活适应。
附图说明
[0033]
图1为本发明圆锥阵列雷达阵列安装示意图;
[0034]
图2为本发明四波束同时扫描示意图;
[0035]
图3为本发明俯仰维度宽波束示意图;
[0036]
图4为本发明tr编号与采集板编号示意图;
[0037]
图5为本发明波束形成流程图;
[0038]
图6为本发明雷达模式切换流程图;
[0039]
图7为本发明跟踪次数计算流程。
具体实施方式
[0040]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将对本发明实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0041]
圆锥阵列雷达天线安装示意图如图1所示,假设某圆锥阵列雷达由48个tr组成,每个tr含有6个阵元。
[0042]
如图2所示,发射宽波束方位宽度为30
°
,同时四波位搜索时可每cpi进行4*30=120
°
方位维度探测。
[0043]
如图3所示,俯仰维度l、m1、m2、h4个搜索波位示意图;搜索目标时4个波束顺序切换。
[0044]
该实施例所述雷达n=12,m=48,列号m取值为0到47,行号取值范围为0到5,各tr对应方位角度如图4所示。
[0045]
如图5波束形成流程图所示,执行搜索任务时,首先计算需要使用的连续12个tr,所用tr的根据搜索波束中心角度确定,保证左右各使用6个tr。确认完所有tr后对所用tr的移相器进行配相即可实现发射波束指向的改变。配相角度根据波束展宽算法计算,以固化在程序中,直接下发对应角度即可。
[0046]
执行跟踪任务时,使用的tr同搜索任务,移相器配相值根据以下公式计算:
[0047][0048]
式中m是列号,n是行号。各阵元的波程差δr
mn
(可表示为:
[0049][0050]
其中θ是待指向的方位角、俯仰角。
[0051]
是第n行的半径,可表示为:
[0052]rn
=r
b-nδdsinφ0[0053]
其中是最下层天线半径,是线阵间距,由实际安装的阵列天线决定,是阵列天线的
半锥角,
[0054]
为阵元方位角,可表示为:
[0055][0056]
确定所用tr与tr的阵元配相值后计算所需数字dbf系数,本实施例在搜索帧时使用5个接收波束,编号0至4,5个接收波束俯仰维度均与发射波束指向相同,方位维度接收波束宽度记为θb,5个接收波束依次指向-2θb、-θb、0、θb、2θb,
[0057]
本实施例在跟踪帧时使用2个接收波束,编号0至1,2个接收波束俯仰维度均与发射波束指向相同,2个接收波束依次指向-0.5θb、0.5θb。
[0058]
该实施例中prt个数由上位机配置,可根据雷达布站电磁环境随时调整。
[0059]
tws、ctt、tas按图6所示流程切换,雷达工作时首先由上位机下达监视指令,下位机进入tws模式搜索目标,搜索到目标后上位机根据目标威胁等级在各模式间切换,无威胁时保持tws模式,中等威胁时进入tas模式,高威胁时直接进入ctt模式。ctt模式下目标跟踪次数按图7所示流程进行计算。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1