一种X射线无损检测设备、像素尺寸标定方法及存储介质与流程
一种x射线无损检测设备、像素尺寸标定方法及存储介质
技术领域
1.本发明涉及成像像素标定,尤其涉及一种x射线无损检测设备、x射线成像像素尺寸标定方法及存储介质。
背景技术:
2.现有工业无损检测x射线设备,通常由射线源、探测器、运动机构、数据处理显示装置等部分构成,如下图所示。其中,射线源产生并放射x射线;探测器接收x射线并成像;运动机构包括载物台、射线源、探测器的运动轴及各轴零点,负责承载被测物体并按需运动;数据处理显示装置串联上述各部分协同工作,并处理显示x射线图像。
3.其中,x射线图像在成像后,还需要对其尺寸进行标定。通常的尺寸标定方法是放置标准件(如针规等)在载物台上,然后设定射线源高度和探测器高度,并采集对应标准件的x射线图像,再通过手动测量的方法获得标准件在x射线图像中的像素长度,然后根据标准件的真实长度,计算得到当前条件下x射线图像中每个像素的尺寸,也即为像素长度/真实长度,实现x射线成像图像的标定。
4.根据透射成像原理可知,不同的射线源高度和探测器高度进行组合时,标准件在x射线成像图像的像素大小不同,一旦射线源高度和探测器高度中的任意一个发生变化时,x射线成像图像的像素尺寸就需要重新标定,然而对于x射线成像图像的像素尺寸需要人工测量并计算的方式,其操作复杂,效率低下;同时,也增加了像素尺寸的标定耗时。
技术实现要素:
5.为了克服现有技术的不足,本发明的目的之一在于提供一种x射线无损检测设备,其能够解决现有技术中x射线无损检测设备在x射线成像像素尺寸标定耗时长的问题。
6.本发明的目的之二在于提供一种x射线成像像素尺寸标定方法,其能够解决现有技术中x射线无损检测设备在x射线成像像素尺寸标定耗时长的问题
7.本发明的目的之三在于提供一种存储介质,其能够解决现有技术中x射线无损检测设备在x射线成像像素尺寸标定耗时长的问题。
8.本发明的目的之一采用如下技术方案实现:
9.一种x射线无损检测设备,包括射线源、探测器、处理器、运动机构和载物台;其中,所述射线源,设于所述载物台下方,与处理器电性连接,用于出射x射线并将x射线出射到所述载物台上的标准件,并且所述标准件内包括多个均匀分布的球形物体;所述探测器,设于所述载物台上方,与处理器电性连接,用于生成所述载物台上的标准件在x射线的照射下形成的x射线成像图像并发送给处理器;所述运动机构与处理器电性连接,用于接收处理器的控制指令,以带动所述射线源、探测器的运动,从而调节所述射线源与载物台的距离以及探测器与载物台的距离;所述处理器,用于首先根据系统设定的多个目标位置按照预设顺序通过所述运动机构带动射线源、探测器移动到对应位置,并获取每个目标位置对应的探测器生成的x射线成像图像;
10.然后对每个目标位置对应的x射线成像图像进行图像处理以得出对应的标准件中相邻球形物体的像素距离,并结合探测器像素尺寸计算得出每个目标位置对应的x射线成像图像中标准件内相邻球形物体之间的长度距离;
11.再根据每个目标位置对应的x射线成像图像中标准件内相邻球形物体之间的长度距离,标准件内相邻球形物体之间的实际长度距离,每个目标位置对应的探测器高度、射线源高度以及探测器在零点位置时探测器的成像平面到标准件的距离,射线源在零点位置时射线源的出射焦点到标准件的距离构建得出对应拟合方程,以及对多个拟合方程构建方程组,并对所述方程组进行求解以得出探测器在零点位置时探测器的成像平面到标准件的距离,射线源在零点位置时射线源的出射焦点到标准件的距离;
12.最后,根据探测器在零点位置时探测器的成像平面到标准件的距离、射线源在零点位置时射线源的出射焦点到标准件的距离、探测器的像素尺寸计算得出x射线成像像素尺寸。
13.进一步地,拟合方程的公式为:
14.f0+(1-a(i))*t0=h
tube
(i)-h
fpd
(i)-a(i)*h
tube
(i)(1);
15.其中,f0为探测器在零点位置时探测器的成像平面到标准件的距离;
16.t0为射线源在零点位置时射线源的出射焦点到标准件的距离;
17.i为目标位置的序号,i∈[1,n],n为目标位置总数;
[0018]
a(i)为第i个目标位置的放大倍数,其中,
[0019]
式中,fpdpxsize是探测器像素尺寸,d为每个目标位置对应的x射线成像图像中标准件内相邻球形物体的像素距离,d为标准件内相邻球形物体的实际长度距离,h
tube
(i)为射线源在第i个目标位置时射线源高度,h
fpd
(i)为探测器在第i个目标位置时探测器高度。
[0020]
进一步地,将n个目标位置对应的拟合方程构建形成方程组,并简化为公式(2):
[0021]
px=b
ꢀꢀ
(2);
[0022]
其中,其中,
[0023]
进一步地,所述处理器,用于通过最小二乘法对公式(2)进行求解以得出射线源在零点位置时射线源的出射焦点到标准件的距离和探测器在零点位置时探测器的成像平面到标准件的距离。
[0024]
进一步地,x射线成像像素尺寸的计算公式为:
[0025][0026]
其中,fpdpxsize是探测器像素尺寸;
[0027]
a为放大倍数,式中,f0为探测器在零点位置时探测器的成像平面到标准件的距离;t0为射线源在零点位置时射线源的出射焦点到标准件的距离;h
tube
为射线源在零点位置时射线源高度,为已知的;h
fpd
为探测器在零点位置时探测器高度,为已知的。
[0028]
本发明的目的之二采用如下技术方案实现:
[0029]
一种x射线成像像素尺寸标定方法,应用于如本发明中的目的之一采用的一种x射线无损检测设备,所述标定方法包括:
[0030]
控制步骤:根据预设的多个目标位置依次控制射线源和探测器分别移动到对应位置上,以控制射线源向载物台上的标准件出射x射线并同时获取对应的x射线成像图像;每个目标位置对应一幅x射线成像图像;
[0031]
获取步骤:对每个目标位置对应的x射线成像图像进行图像处理,以得出对应x射线成像图像中标准件内相邻球形物体的像素距离,并根据探测器像素尺寸计算得出每个目标位置对应的x射线成像图像中标准件内相邻球形物体的长度距离;
[0032]
计算步骤:根据标准件内相邻球形物体的实际长度距离,每个目标位置对应的x射线成像图像中标准件内相邻球形物体的长度距离,每个目标位置对应的探测器高度、射线源高度以及探测器在零点位置时探测器的成像平面到标准件的距离,射线源在零点位置时射线源的出射焦点到标准件的距离构建对应的拟合方程;
[0033]
求解步骤:将多个拟合方程构建形成方程组,并对所述方程组进行求解以得出射线源在零点位置时射线源的出射焦点到标准件的距离与探测器在零点位置时探测器的成像平面到标准件的距离;
[0034]
标定步骤:根据射线源在零点位置时射线源的出射焦点到标准件的距离与探测器在零点位置时探测器的成像平面到标准件的距离和探测器像素尺寸计算得出x射线成像像素尺寸。
[0035]
进一步地,拟合方程的公式为:
[0036]
f0+(1-a(i))*t0=h
tube
(i)-h
fpd
(i)-a(i)*h
tube(i)ꢀꢀ
(1);
[0037]
其中,f0为探测器在零点位置时探测器的成像平面到标准件的距离;
[0038]
t0为射线源在零点位置时射线源的出射焦点到标准件的距离;
[0039]
i为目标位置的序号,i∈[1,n],n为目标位置总数;
[0040]
a(i)为第i个目标位置的放大倍数,其中,
[0041]
式中,fpdpxsize是探测器像素尺寸,d为每个目标位置对应的x射线成像图像中标准件内相邻球
形物体的像素距离,d为标准件内相邻球形物体的实际长度距离,h
tube
(i)为第i个目标位置时射线源高度,h
fpd
(i)为第i个目标位置时探测器高度。
[0042]
进一步地,所述求解步骤还包括:将n个拟合方程构建形成方程组,并简化为公式(2):
[0043]
px=b
ꢀꢀ
(2);
[0044]
其中,其中,
[0045]
所述求解步骤还包括:通过最小二乘法对公式(2)进行求解以得出射线源在零点位置时射线源的出射焦点到标准件的距离和探测器在零点位置时探测器的成像平面到标准件的距离。
[0046]
进一步地,x射线成像像素尺寸的计算公式为:
[0047][0048]
其中,fpdpxsize是探测器像素尺寸;
[0049]
a为放大倍数,式中,f0为探测器在零点位置时探测器的成像平面到标准件的距离;t0为射线源在零点位置时射线源的出射焦点到标准件的距离;h
tube
为射线源在零点位置时射线源高度,为已知的;h
fpd
为探测器在零点位置时探测器高度,为已知的。
[0050]
本发明的目的之三采用如下技术方案实现:
[0051]
一种存储介质,所述存储介质为计算机可读存储介质,其上存储有计算机程序,所述计算机程序为x射线成像像素尺寸标定程序,所述x射线成像像素尺寸标定程序被处理器执行如本发明的目的之二采用的一种x射线成像像素尺寸标定方法的步骤。
[0052]
相比现有技术,本发明的有益效果在于:
[0053]
本发明通过拟合方程将x射线成像像素尺寸的计算转换为探测器在零点位置时探测器的成像平面与标准件的距离和射线源在零点位置时射线源的出射焦点与标准件的距离,从而使得x射线成像像素尺寸不与探测器的高度、射线源高度相关,解决现有技术中探测器与射线源高度发生一旦发生变化后需要对设备的x射线成像像素尺寸进行重新标定导致标定耗时的问题。
附图说明
[0054]
图1为本发明提供的x射线无损检测设备的结构示意图;
[0055]
图2为本发明提供的x射线成像像素尺寸标定方法流程图。
[0056]
图中:1、载物台;2、标准件;3、探测器;4、射线源。
具体实施方式
[0057]
下面,结合附图以及具体实施方式,对本发明做进一步描述,需要说明的是,在不相冲突的前提下,以下描述的各实施例之间或各技术特征之间可以任意组合形成新的实施例。
[0058]
基于现有的x射线图像尺寸标定方法所存在的缺陷,本发明通过对现有的x射线无损检测设备中的x射线图像尺寸标定算法进行改进,从而提高标定效率、降低标定耗时。通过将x射线成像像素尺寸转换成射线源、探测器在零点位置时的高度来计算,使得x射线成像像素尺寸不会随着目标位置变化而引起探测器或射线源的高度变化而变化。
[0059]
如图1所示,本发明所针对的x射线无损检测设备,一般包括射线源4、探测器3、运动机构、载物台1和处理器。
[0060]
其中,载物台1,用于放置标准件2。优选地,本发明中的标准件为二维平面标准件,标准件上包括多个均匀分布的球形物体。每个球形物体在x射线成像图像中表征为类圆形。标准件的尺寸一定时,标准件内相邻球形物体之间的长度距离也是已知的。
[0061]
射线源4,位于载物台1下方,用于产生并放射x射线,并将x射线出射到载物台1上进而出射到标准件2上。
[0062]
探测器3,位于载物台1上方,用于接收标准件2在x射线照射后形成的x射线成像图像,并将x射线成像图像发送给处理器。
[0063]
运动机构与处理器电性连接,用于在处理器的控制下驱动探测器3、射线源4的移动,从而调节探测器3、射线源4与载物台1的距离,也即调节探测器3、射线源4与载物台1上标准件2的距离,以满足对不同x射线的测试需求。由于不同的x射线其所需要的探测器3、射线源4的高度不同,因此,通过设置运动机构可实现灵活调节,满足多种需求。
[0064]
在实际的测量过程中,可根据需求将探测器3或射线源4上下调节来调节其与标准件2之间的距离,以适合不同的标准件2的成像。另外,本发明并不对x射线无损检测设备的硬件做任何的改进,因此,对于运动机构如何对探测器3、射线源4的高度进行调节,本发明不做具体介绍,是本领域技术人员所熟知的技术。
[0065]
另外,对于探测器3、射线源4来说,其本身均有一个零点位置,并且当探测器3、射线源4处于其对应零点位置时探测器3高度、射线源4高度均为已知的,是由设备生产后内置的参数。
[0066]
处理器,还与探测器3、射线源4电性连接,用于接收探测器3发送的x射线成像图像、控制射线源4发射出x射线等。同时,处理器,还用于对接收到的x射线成像图像进行处理。本发明是针对现有的x射线成像像素尺寸标定存在耗时长等问题,提供一种新的x射线成像图像像素尺寸的标定方法,通过将选定的标准件2置于载物台1上,然后再在系统内设定多个目标位置,并按照多个目标位置将探测器3和射线源4依次移动到对应位置上并获取每个目标位置对应的x射线成像图像,以计算得出探测器在零点位置时探测器高度、射线源
在零点位置时射线源高度,进而得出x射线成像图像像素尺寸,由于标定后的x射线成像像素尺寸与探测器实际高度、射线源实际高度无关,解决现有技术中每次探测器或射线源的位置发生变化时,都需要对x射线成像图像像素尺寸重新标定导致标定耗时等问题。
[0067]
其中,每个目标位置均包括探测器3的位置和射线源4的位置。从前述可知,可根据需求将探测器3与载物台1的距离进行调节,同样地对于射线源4的位置也可以进行调节。本发明通过在系统内设置多个目标位置,该目标位置实际上是指探测器3位置与射线源4位置的组合。根据每个目标位置中探测器3的位置和射线源4的位置,并以探测器3的零点位置和射线源4的零点位置作参考来实现对探测器3与射线源4的控制。
[0068]
在按照每个目标位置将探测器3和射线源4移动到对应位置上时,处理器,控制射线源4出射x射线,并通过探测器3接收x射线成像图像。
[0069]
优选地,本实施例中设定有n个目标位置,则处理器会接收到n个目标位置的x射线成像图像,然后对每个x射线成像图像进行图像处理以得出每个x射线成像图像的像素尺寸,并结合每个目标位置对应的探测器3高度、射线源4高度和标准件2中相邻像素的距离构建得出对应的拟合方程。
[0070]
具体地,该拟合方程为:
[0071]
f0+(1-a(i))*t0=h
tube
(i)-h
fpd
(i)-a(i)*h
tube(i)ꢀꢀ
(1)。
[0072]
其中,f0为探测器3在零点位置时探测器3的成像平面到标准件2的距离。
[0073]
t0为射线源4在零点位置时射线源4的出射焦点到标准件2的距离。
[0074]
i为目标位置的序号,i∈[1,n],n为目标位置总数,为常数,具体可根据需求预先设定。
[0075]
a(i)为第i个目标位置的放大倍数,其中,
[0076]
式中,fpdpxsize是探测器3像素尺寸,d为每个目标位置对应的x射线成像图像中标准件内相邻球形物体的像素距离,d为标准件内相邻球形物体的实际长度距离,h
tube
(i)为第i个目标位置时射线源4高度,h
fpd
(i)为在第i个目标位置时探测器3高度。
[0077]
从公式(1)中可知,探测器3在零点位置时探测器3的成像平面到标准件2的距离、射线源4在零点位置时射线源4的出射焦点到标准件2的距离、探测器3像素尺寸不会随着探测器3和射线源4的位置变化而变化的。
[0078]
因此,本发明将n个拟合方程堆叠构成方程组,并简化为公式(2):
[0079]
px=b
ꢀꢀ
(2)。
[0080]
其中,
[0081]
也即,通过对公式(2)进行求解即可得出探测器3在零点位置时探测器3的成像平面到标准件2的距离、射线源4在零点位置时射线源4的出射焦点到标准件2的距离,然后再根据探测器3在零点位置时探测器3的成像平面到标准件2的距离、射线源4在零点位置时射线源4的出射焦点到标准件2的距离、探测器3像素尺寸来计算得出x射线成像像素尺寸。
[0082]
优选地,本发明通过最小二乘法对公式(2)进行求解。另外,对于公式(2)进行求解还可以采用其他算法实现,对于方程组的求解是本领域技术人员所熟知的。
[0083]
优选地,本发明还给出x射线成像像素尺寸的计算公式为:
[0084][0085]
其中,fpdpxsize是探测器3像素尺寸。
[0086]
a为放大倍数,式中,f0为探测器3在零点位置时探测器3的成像平面到标准件2的距离;t0为射线源4在零点位置时射线源4的出射焦点到标准件2的距离;h
tube
为射线源4在零点位置时射线源4高度,为已知的;h
fpd
为探测器3在零点位置时探测器3高度,为已知的。
[0087]
很明显,从公式(3)中可知,x射线成像像素尺寸并不会随着射线源4与探测器3的位置的变化而变化,因此,当探测器3和射线源4的位置发生变化时,无需重新对x射线成像像素尺寸进行标定,提高了标定效率、降低标定耗时。
[0088]
实施例二
[0089]
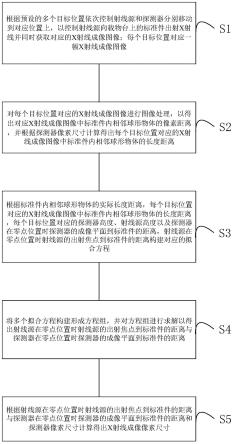
基于实施例一,本发明还提供另一实施例,一种x射线成像像素尺寸标定方法,如图2所示,包括以下步骤:
[0090]
步骤s1、根据预设的多个目标位置依次控制射线源和探测器分别移动到对应位置上,以控制射线源向载物台上的标准件出射x射线并同时获取对应的x射线成像图像;每个目标位置对应一幅x射线成像图像。
[0091]
本发明通过设定多个目标位置,然后依次将射线源和探测器移动到对应位置,然后来获取探测器形成的x射线成像图像。
[0092]
步骤s2、对每个目标位置对应的x射线成像图像进行图像处理,以得出对应x射线成像图像中标准件内相邻球形物体的像素距离,并根据探测器像素尺寸计算得出每个目标位置对应的x射线成像图像中标准件内相邻球形物体的长度距离。
[0093]
通过对x射线成像图像进行图像处理后可得出x射线成像图像中标准件内相邻球形物体之间的像素距离,然后结合探测器像素尺寸计算得出每个目标位置对应的x射线成像图像中标准件内相邻球形物体的长度距离。由于不同的目标位置,标准件在成像后,标准
件在x成像图像中显示的相邻球形物体之间的距离也不同。因此,对于每个目标位置对应的x射线成像图像进行图像处理,并结合探测器像素尺寸即可得出每个目标位置的x射线成像图像的标准件中相邻球形物体之间的距离,也即相邻球形物体的长度距离。
[0094]
步骤s3、根据标准件内相邻球形物体的实际长度距离,每个目标位置对应的x射线成像图像中标准件内相邻球形物体的长度距离,每个目标位置对应的探测器高度、射线源高度以及探测器在零点位置时探测器的成像平面到标准件的距离,射线源在零点位置时射线源的出射焦点到标准件的距离构建对应的拟合方程。
[0095]
通过构建方程的方式来得出关于探测器在零点位置时探测器的成像平面到标准件的距离,射线源在零点位置时射线源的出射焦点到标准件的距离的方程,以便对其进行求解。
[0096]
其中,拟合方程的公式为:
[0097]
f0+(1-a(i))*t0=h
tube
(i)-h
fpd
(i)-a(i)*h
tube(i)ꢀꢀ
(1);
[0098]
其中,f0为探测器在零点位置时探测器的成像平面到标准件的距离;
[0099]
t0为射线源在零点位置时射线源的出射焦点到标准件的距离;
[0100]
i为目标位置的序号,i∈[1,n],n为目标位置总数;
[0101]
a(i)为第i个目标位置的放大倍数,其中,
[0102]
式中,fpdpxsize是探测器的像素尺寸,d为每个目标位置对应的x射线成像图像中标准件内相邻球形物体的像素距离,d为标准件内相邻球形物体的实际长度距离,h
tube
(i)为第i个目标位置时射线源高度,h
fpd
(i)为第i个目标位置时探测器高度。
[0103]
步骤s4、将多个拟合方程构建形成方程组,并对方程组进行求解以得出射线源在零点位置时射线源的出射焦点到标准件的距离与探测器在零点位置时探测器的成像平面到标准件的距离。
[0104]
将多个拟合方程组成方程组后,再对方程组进行求解可得出探测器在零点位置时探测器的成像平面到标准件的距离,射线源在零点位置时射线源的出射焦点到标准件的距离。
[0105]
优选地,本发明采用最小二乘法对方程组进行求解。
[0106]
其中,将n个目标位置对应的拟合方程构建形成方程组,并简化为公式(2):
[0107]
px=b
ꢀꢀ
(2);
[0108]
其中,
[0109]
步骤s5、根据射线源在零点位置时射线源的出射焦点到标准件的距离与探测器在零点位置时探测器的成像平面到标准件的距离和探测器像素尺寸计算得出x射线成像像素尺寸。
[0110]
其中,x射线成像像素尺寸的计算公式为:
[0111][0112]
其中,fpdpxsize是探测器像素尺寸;
[0113]
a为放大倍数,式中,f0为探测器在零点位置时探测器的成像平面到标准件的距离;t0为射线源在零点位置时射线源的出射焦点到标准件的距离;h
tube
为射线源在零点位置时射线源高度,为已知的;h
fpd
为探测器在零点位置时探测器高度,为已知的。
[0114]
实施例三
[0115]
基于实施例二,本发明还提供一种存储介质,所述存储介质为计算机可读存储介质,其上存储有计算机程序,所述计算机程序为x射线成像像素尺寸标定程序,所述x射线成像像素尺寸标定程序被处理器执行以下步骤:
[0116]
控制步骤:根据预设的多个目标位置依次控制射线源和探测器分别移动到对应位置上,以控制射线源向载物台上的标准件出射x射线并同时获取对应的x射线成像图像;每个目标位置对应一幅x射线成像图像;
[0117]
获取步骤:对每个目标位置对应的x射线成像图像进行图像处理,以得出对应x射线成像图像中标准件内相邻球形物体的像素距离,并根据探测器像素尺寸计算得出每个目标位置对应的x射线成像图像中标准件内相邻球形物体的长度距离;
[0118]
计算步骤:根据标准件内相邻球形物体的实际长度距离,每个目标位置对应的x射线成像图像中标准件内相邻球形物体的长度距离,每个目标位置对应的探测器高度、射线源高度以及探测器在零点位置时探测器的成像平面到标准件的距离,射线源在零点位置时射线源的出射焦点到标准件的距离构建对应的拟合方程;
[0119]
求解步骤:将多个拟合方程构建形成方程组,并对所述方程组进行求解以得出射线源在零点位置时射线源的出射焦点到标准件的距离与探测器在零点位置时探测器的成像平面到标准件的距离;
[0120]
标定步骤:根据射线源在零点位置时射线源的出射焦点到标准件的距离与探测器在零点位置时探测器的成像平面到标准件的距离和探测器像素尺寸计算得出x射线成像像素尺寸。
[0121]
进一步地,拟合方程的公式为:
[0122]
f0+(1-a(i))*t0=h
tube
(i)-h
fpd
(i)-a(i)*h
tube(i)ꢀꢀ
(1);
[0123]
其中,f0为探测器在零点位置时探测器的成像平面到标准件的距离;
[0124]
t0为射线源在零点位置时射线源的出射焦点到标准件的距离;
[0125]
i为目标位置的序号,i∈[1,n],n为目标位置总数;
[0126]
a(i)为第i个目标位置的放大倍数,其中,
[0127]
式中,fpdpxsize是探测器像素尺寸,d为每个目标位置对应的x射线成像图像中标准件内相邻球形物体的像素距离,d为标准件内相邻球形物体的实际长度距离,h
tube
(i)为第i个目标位置时射线源高度,h
fpd
(i)为第i个目标位置时探测器高度。
[0128]
进一步地,所述求解步骤还包括:将n个拟合方程构建形成方程组,并简化为公式(2):
[0129]
px=b
ꢀꢀ
(2);
[0130]
其中,其中,
[0131]
所述求解步骤还包括:通过最小二乘法对公式(2)进行求解以得出射线源在零点位置时射线源的出射焦点到标准件的距离和探测器在零点位置时探测器的成像平面到标准件的距离。
[0132]
进一步地,x射线成像像素尺寸的计算公式为:
[0133][0134]
其中,fpdpxsize是探测器像素尺寸;
[0135]
a为放大倍数,式中,f0为探测器在零点位置时探测器的成像平面到标准件的距离;t0为射线源在零点位置时射线源的出射焦点到标准件的距离;h
tube
为射线源在零点位置时射线源高度,为已知的;h
fpd
为探测器在零点位置时探测器高度,为已知的。
[0136]
上述实施方式仅为本发明的优选实施方式,不能以此来限定本发明保护的范围,本领域的技术人员在本发明的基础上所做的任何非实质性的变化及替换均属于本发明所
要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1