一种半球谐振陀螺正交耦合误差标定方法与流程
1.本发明涉及陀螺技术领域,尤其涉及一种半球谐振陀螺正交耦合误差标定方法。
背景技术:
2.半球谐振陀螺是一种极具发展前景的新型高精度陀螺,其优点在于:体积小,精度高,功耗低,可靠性高,启动时间短,机械部件结构简单,工作温度范围大,抗电离辐射能力强,对线性过载不敏感,断电时稳定性好,制造半球谐振陀螺时可以实现自动化生产等,此外,半球谐振陀螺还具有较长的寿命,有关资料表明:半球谐振陀螺可以连续工作15年以上并保持所要求的性能,因此被公认为是最长寿命的陀螺。
3.谐振子生产制造过程受制于目前工艺的局限,谐振子的唇缘、半球壳表面、支撑杆会产生微小的裂纹。当谐振子振动时,裂纹的大小和分布情况还可能发生变化,影响陀螺的使用寿命。这些裂纹还会影响谐振子的刚度,并残留内应力;裂纹的分布不均匀从而残留的内应力分布不均匀,导致谐振子不同位置的刚度不一致和不同位置的阻尼的不一致。
4.谐振子周向的刚度和质量的不均会导致频率裂解的产生,频率裂解的含义是指刚度和质量的傅里叶展开四次谐波会导致谐振子在自由振动状态下会出现两个相互正交的频率轴,谐振子振动波腹处在这两个轴时分别达到最大固有频率和最小固有频率,固有振动频率较小的轴称为“重”轴,固有振动频率较大的轴称为“轻”轴,最大固有频率和最小固有频率的差值称为频率裂解。
5.消除频率裂解的方式是对谐振子唇缘的质量分布四次谐波进行消除,一种直观的修调方式是构造与谐振子上初始四次谐波质量分布函数相位相差180
°
的谐波质量分布函数与之抵消,在谐振子上添加或消除质量块。
6.频率裂解会使波节点振幅快速增长,若没有正交回路对波节点振幅的抑制,谐振子的四波腹振动最终会消失,驻波变为行波,导致无法对振型进行检测。波节点振幅还会引起陀螺漂移,为了减小陀螺在力反馈模式下的漂移,一般会通过修调的方式将刚度轴对准电极轴。频率裂解会存在残余,在半球谐振陀螺的控制系统里一般通过与哥氏力正交的正控制力抑制频率裂解,因为该控制力与哥氏力正交,所以一般将此控制力称为正交控制力。当正交控制力施加的相位不准确时,会产生正交耦合误差,该误差会影响陀螺零偏,从而影响陀螺精度。
技术实现要素:
7.本发明所要解决的技术问题是提供一种半球谐振陀螺正交耦合误差标定方法,通过二阶多项式拟合判断达到最小值时的控制力相位,并将该控制力相位反馈给陀螺的dds,将正交控制相位进行重新标定,防止陀螺产生正交耦合误差,从而保证陀螺的精度。
8.本发明是通过以下技术方案予以实现:一种半球谐振陀螺正交耦合误差标定方法,其包括如下步骤:
s1:将陀螺处在静态环境中,保持陀螺敏感角速度为定值;s2:控制正交控制力的相位,使其在设定区间内变化;s3:计算模块根据式(1)计算出相应的正交控制力;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1);其中为振动频率,表示频率裂解值,为相位耦合误差,表示力到角速度的标度,为陀螺敏感角速度,表示频率轴的位置;s4:计算模块通过二阶多项式(2)拟合得到,达到最小值时的相位 为式(3);
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
ꢀꢀꢀꢀꢀ
(3)其中表示时刻的正交控制相位,拟合的二次项为,拟合的一次项为, x为拟合参数;s5: 计算模块将 反馈给上位机,上位机控制陀螺的dds将正交控制相位替换为 。
9.优化的,s2中设定区间为 。
10.进一步,相位 每次变化为0.1
°
,步长为1秒。
11.优化的,每隔两小时重复一次步骤s1-s5。
12.发明的有益效果本发明提供的一种半球谐振陀螺正交耦合误差标定方法,具有如下优点:本发明通过改变正交控制力相位,并计算出相对应的正交控制力,然后通过二阶多项式进行拟合,判断达到最小值时的控制力相位,并将该控制力相位反馈给陀螺的dds,将正交控制相位进行重新标定,可以防止陀螺产生正交耦合误差,保证陀螺的精度。
附图说明
13.图1是二位弹簧-质点运动模型图;图2是质点运动轨迹图。
具体实施方式
14.一种半球谐振陀螺正交耦合误差标定方法,其包括如下步骤:s1: 将陀螺处在静态环境中,保持陀螺敏感角速度为定值;s2:控制正交控制力的相位 ,使其在设定区间内变化;s3: 计算模块根据式(1)计算出相应的正交控制力;
ꢀꢀꢀꢀꢀꢀꢀꢀ
(1);其中为振动频率,表示频率裂解值,为相位耦合误差,表示力到角速度的标度,为陀螺敏感角速度,表示频率轴的位置;s4:计算模块通过二阶多项式(2)拟合得到,达到最小值时的相位 为式(3);
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
ꢀꢀꢀꢀꢀ
(3)其中表示时刻的正交控制相位,拟合的二次项为,拟合的一次项为, x为拟合参数;s5: 计算模块将 反馈给上位机,上位机控制陀螺的dds将正交控制相位替换为 。
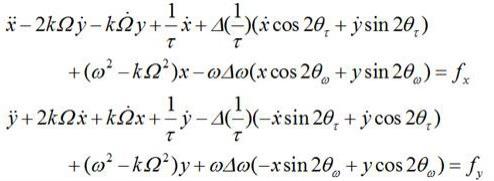
15.半球谐振陀螺运动微分方程可以基于基尔霍夫—李雅夫假设,假设外部输入角速度远小于谐振子的谐振频率,谐振子假定是理想的,不存在阻尼、质量不均匀等误差,推导得到;将谐振子各点的位移按不可拉伸薄壳的二阶固有振型展开,采用布勃诺夫—加廖尔金法列出描述谐振子的n=2阶情况下的振动,如式(4)所示;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)其中、表示x电极和y电极处谐振子振动位移,为进动系数,为陀螺敏感角
速度,表示阻尼时间常数,表示阻尼不均,表示阻尼轴位置,为振动频率,为频率裂解误差项,表示频率轴的位置,、表示在x轴和y轴施加的控制力。
16.式(4)表示的微分方程对应的解为式(5)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)半球谐振陀螺的通过振动信号解调的方式将振动信息转换为椭圆参数、、,,其中代表振动驻波波腹点振幅,代表振动驻波波节点振幅,代表振型角, 表示初始振动相位。为了便于对陀螺进行控制,可以通过待定系数法对(4)式表示的微分方程进行求解。
17.理想状态下,抵消哥式力的力反馈控制力与抑制频率裂解的正交控制力为一组相位相差90度的控制力。但是由于线路误差,与会存在相位耦合误差,该误差会导致正交控制力耦合到上,影响陀螺零偏,存在误差时和的关系可以表示为式(1);
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)其中表示力到角速度的标度,为陀螺敏感的角速度,表示频率裂解值,为频率轴相对检测轴的偏角。
18.由式(1)可以看出,输入相应的正交控制力的相位 值,根据式(1)就可以得到相应的正交控制力的值。
19.若将正交控制输出随相位的变化绘制成曲线,则为一条抛物线,抛物线最低点对应的正交控制相位即为无误差的控制力相位。而抛物线的最低点的确定,决定了值的准确程度。
20.因此,通过最小二乘法建模,得到式(6)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)其中,z为时间序列,x为拟合参数。
21.然后通过二阶多项式(2)拟合进行拟合,可以得到二阶多项式的二次项,及一次项为,而达到最小值即抛物线的最低点时有。因此该点对应的相位则为待
求的无误差的正交控制相位。
22.ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)其中表示时刻的正交控制相位,拟合的二次项为,拟合的一次项为,待求的无误差的正交控制相位为式(3):
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)因此,将求得的值反馈给上位机,上位机控制陀螺的dds(直接数字式频率合成器)将正交控制相位替换为 ,可以准确的消除陀螺产生的正交耦合误差,保证陀螺的精度。
23.优化的,s2中设定区间为 ,其中 为当前相位值。
24.可以在此区间内得到多组数据,保证能够得到正交控制力的最低点,便于后期的拟合。
25.进一步,相位 每次变化为0.1
°
,步长为1秒,便于计算模块读取数据及计算,并且有利于后期拟合。
26.优化的,每隔两小时重复一次步骤s1-s4,通过上述方法定时对陀螺的正交耦合误差进行标定,可以减少陀螺的正交耦合误差,保证陀螺的工作精度。
27.综上所述,本发明提出的一种半球谐振陀螺正交耦合误差标定方法,通过改变正交控制力相位,并计算出相对应的正交控制力,然后通过二阶多项式进行拟合,判断达到最小值时的控制力相位,并将该控制力相位反馈给陀螺的dds,将正交控制相位进行重新标定,可以防止陀螺产生正交耦合误差,保证陀螺的精度。
28.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1