一种粪便肠道菌群样本快速送检机器人的制作方法
1.本发明涉及粪便肠道菌群样本处理技术领域,具体说是一种粪便肠道菌群样本快速送检机器人。
背景技术:
2.粪便常规是体检里面非常常见的一种检查,被检查人员也就是受试者需要自己去采集粪便肠道菌群样本,再将采集到的样本放入无菌的保存管中,并交给护士长或者前台护士,然后由相关医护人员再将保存管送至检验科室进行检验,而在将粪便肠道菌群样本送至检验科室过程中,医护人员通常需要借助送检设备对样本进行盛放,并通过设备将样本推送至检验科室。
3.然而,现有的送检设备在使用过程中存在很大的缺陷,现有的送检设备需要医护人员进行推动,并且需要人工方式对样本进行整理,使用不够智能,也不够方便,降低了使用的便利性,无法降低医护人员的工作强度,同时,人工方式进行整理,容易导致样本出现混淆,现有的送检设备不是面向受试者的,受试者需要拿着样本找到护士长或者相关负责送检的人员,一方面,无法为受试者提供便利,另一方面,受试者将样本送至相关负责送检的人员手中这一环节,拖延了样本送至检验科室的时间,会对样本的有效性造成影响,现有的送检设备无法准确计算送检时间,进而无法根据送检时间合理安排送检频率,从而无法在保证样本有效的情况下一次性尽可能多的转送样本。
技术实现要素:
4.针对现有技术中的问题,本发明提供了一种粪便肠道菌群样本快速送检机器人。
5.本发明解决其技术问题所采用的技术方案是:一种粪便肠道菌群样本快速送检机器人,包括行走组件、存放柜和制冷压缩机,所述行走组件的顶部安装有存放柜,所述存放柜的顶部安装有制冷压缩机,其中,所述存放柜中部偏下处水平设置有上下隔板,所述存放柜通过上下隔板分隔出上下两个腔室,所述存放柜的上腔室通过两个竖板分隔出三个功能空间,所述上下隔板对应三个功能空间处均开设有通孔,所述存放柜其中一端的功能空间内设置有摆放组件,所述存放柜的另外两个功能空间的顶部内壁均固定有扣紧组件,两个所述扣紧组件上均紧扣有若干个上下叠放的托盘,所述存放柜的下腔室内安装有托运组件,所述托运组件上安装有托举组件,所述存放柜外侧安装有存放通道,所述存放通道与安装摆放组件的工作空间对应,所述存放柜一侧安装有与两个上下腔室对应的柜门,该机器人通过对受试者提取的样本进行存放,并自动将受试者的样本送至检验处,整个过程不需要送检医护人员参与,该机器人可以被布置在厕所旁边,使受试者在提取到样本后,能够更加快速以及更加方便的将样本送出,减少了受试者寻找送检医护人员的时间,同时,也提高了受试者使用的便利性,该机器人通过设置存放柜,一方面,能够收取大量的样本,另一方面,受试者将样本放入后,非检验科人员无权打开,进而使样本能更加安全以及更加可靠的被送至检验处,该机器人通过设置制冷压缩机进行制冷,使存放柜中的样本内的菌群不易
受损,通过托运组件和托举组件配合,使该机器人能够对摆放满的托盘进行堆叠,并自动取出空闲托盘供摆放组件继续摆放样本,一方面,使该存放柜能够存放更多样本,提高该存放柜的存放能力,另一方面,实现对样本存放的有序整理,使存放的样本不会在存放柜内挤压,保证了样本的安全,同时,也使检验科人员能够按照托盘整盘取出样本,进而减少了检验科医护人员整理样本的时间,同时,也使检验科人员能够更快的进行检验工作,提高样本的检测速度;其中,所述摆放组件包括两个前后移动轨板、一个左右移动轨板和一个升降轨板,两个所述前后移动轨板呈平行设置,所述左右移动轨板移动配合在前后移动轨板上,所述左右移动轨板上左右移动配合有左右移板,所述左右移板远离左右移动轨板的一侧升降配合有升降轨板,所述升降轨板的底部安装有电动夹持器。
6.优选的,行走组件包括行走底架和行走车体,行走车体为箱体结构,且行走车体通过若干个固定支杆安装在行走底架顶部,行走底架底部两侧均安装有一对行走轮,行走底架的底部安装有两个分别驱动两对行走轮转动的行走驱动电机。
7.优选的,行走车体内设置有蓄电池以及控制车辆行进的plc控制器一,行走车体周侧安装有防碰撞超声波传感器,行走车体前后端部均安装有可转动的摄像头,行走车体一端顶部安装有激光雷达,plc控制器一控制行走驱动电机,且plc控制器通过通讯线路分别与防碰撞超声波传感器、摄像头以及激光雷达连接,通过使用plc控制器一对该机器人的行走组件进行控制,使该机器人能自动寻找路线移动,通过plc控制器一和plc控制器二的配合使用,使该机器人对送检每个环节花费的时间控制的更加精准,进而使该机器人更加容易的去设定送检频率,能一次性转送更多的样本,通过在行走组件上安装防碰撞超声波传感器、摄像头以及激光雷达,使该机器人送检路线能够规划的更加合理,使送检速度更快,同时,也使该机器人送检过程更加安全,不会发生碰撞。
8.优选的,两个前后移动轨板均传送配合有传送带,两个传送带从左右移动轨板两端带动左右移动轨板移动,左右移动轨板上转动配合有丝杆一,左右移板与左右移动轨板相扣,左右移板通过与丝杆一螺纹配合在左右移动轨板上移动,升降轨板一侧竖直转动配合有与左右移板螺纹配合的丝杆二,升降轨板通过丝杆二升降配合在左右移板一侧,通过前后移动轨板、左右移动轨板和升降轨板带动,调节电动夹持器前后左右以及上下的位置,通过调节电动夹持器的位置,将存放通道内的保存管夹起并排放在托盘上的样本筒内。
9.优选的,托运组件包括底板、传动链和载板,底板水平固定在存放柜下腔室底部,底板上传动配合有传动链,底板一端安装有驱动传动链传动的托运驱动电机,载板滑动配合在底板顶部,且载板的底部与传动链连接,载板通过传动链带动移动,通过托运驱动电机带动,使传动链传动,传动链带动载板移动,通过移动载板,带动托举组件移动。
10.优选的,托举组件包括液压缸、液压杆和托举板,液压缸竖直规定在载板上,液压缸的顶部设有液压杆,液压杆的顶部固定有呈“工”字型结构的托举板,且托举板呈水平设置,托举板顶部开设有与托盘大小相适配的凹槽,通过液压缸带动,使液压杆移动,通过移动液压杆,调节托举板的高度,通过将托举板设置为“工”字型结构,使扣板能够从托举板两侧将托盘托起,通过在托举板上设置凹槽,使托盘在托举板上不易动,更加稳定,保证了托举组件以及托运组件运送托盘的可靠性和安全性。
11.优选的,托盘的顶部等间距设置有若干个样本筒,样本筒内设置有开设有若干个
可存放试管和样本管的置物槽,通过在一个样本筒上设置多个置物槽,方便将一位受试者的多个样本集中存放在一起,避免受试者样本混淆,托盘的底部设置固定有若干个杠铃状的顶杆,顶杆的高度大于样本筒的高度,托盘顶部位于样本筒的间隙处设置有数量与顶杆数量相同位置与顶杆位置相同的环状底座,多个托盘堆叠时,上方托盘底部的顶杆插入下方托盘顶部的环状底座内,通过设置顶杆,使托盘在堆叠时不会挤压样本筒和样本筒内的样本,通过设置环状底座与顶杆适配,使托盘堆叠后不会向一侧偏移,保证堆叠的稳定和可靠。
12.优选的,扣紧组件包括移动顶架、双向丝杠和两个移块,移动顶架呈倒置的“u”字型结构,移动顶架的底部焊接有滑轨,移动顶架的靠近滑轨的一侧转动配合有双向丝杠,移动顶架一端安装有驱动双向丝杠转动的紧扣驱动电机,两个移块的顶部均焊接有与滑轨滑动配合的滑块,两个移块均通过滑块滑动配合在移动顶架底部,两个移块一侧均焊接有与双向丝杠螺纹配合的螺母,且两个螺母分别位于双向丝杠正螺纹一端和反螺纹一端,两个移块的底部均焊接有呈“l”型结构的扣板,两个扣板呈对称设置,堆叠一起的若干个托盘通过两个扣板勾起,通过紧扣驱动电机带动双向丝杠转动,双向丝杠两端为反向的螺纹,所以使两个移块呈相向或者反向同步移动,进而使两个扣板实现相互靠近或者相互远离的动作,使两个扣板能够从底部托起堆叠的托盘以及能够从堆叠的托盘底部抽出。
13.优选的,存放柜安装有存放通道的一侧设置有人脸识别摄像头,存放柜一侧位于人脸识别摄像头下方安装有触控显示面板,存放柜上安装有播报音响,存放柜顶部的制冷压缩机向存放柜上腔室提供冷源,存放柜中安装有plc控制器二,存放通道上安装有通过plc控制器二控制的通道门,通过存放柜上的人脸识别系统,确认受试者身份,并通过plc控制器二控制,将存放通道打开,受试者将保存管放入存放通道内,通过人脸识别受试者身份,并通过摆放组件对受试者提取的样本进行分类存放,根据机器人上人脸识别系统确认受试者身份信息,通过plc控制器二实现自动摆放,同时,也使该机器人对受试者提取的样本管理更加方便,比人工方式,更加不易出错,一方面,降低了样本混淆的可能,提高了该机器人使用的可靠性,另一方面,检验科的人员检测样本时,也更加的方便不易出错,大大减轻检验科医护人员的工作强度,通过播报音响播送样本采集方法以及该机器人的自助使用方法。
14.优选的,该粪便肠道菌群样本快速送检机器人的使用方法具体包括以下步骤:步骤一:将该机器人停放在医院厕所旁边,采集新鲜的粪便样本后,放入无菌保存管中,受试者拿着存有粪便肠道菌群样本的保存管来到该机器人旁,通过存放柜上的人脸识别系统,确认受试者身份,并通过plc控制器二控制,将存放通道打开,受试者将保存管放入存放通道内,通过前后移动轨板、左右移动轨板和升降轨板带动,调节电动夹持器前后左右以及上下的位置,通过调节电动夹持器的位置,将存放通道内的保存管夹起并排放在托盘上的样本筒内,该托盘通过托举组件支撑在摆放组件下方;步骤二:托举组件上托盘摆满保存管后,通过液压缸带动,使液压杆移动,通过移动液压杆,调节托举板的高度,将托举板向下调节,使托举板以及托举板上托盘进入存放柜的下腔室,通过托运驱动电机带动,使传动链传动,传动链带动载板移动,通过移动载板,带动托举组件移动,移动托举组件到另一端,再次通过液压缸驱动,将托举板连同托盘向上送入存放柜上腔室用于存放样本的功能空间内最低处后停下,此时,通过该功能空间内的紧
扣驱动电机驱动,使两个扣板反向移动,使扣板从叠放的托盘底部脱离,叠放的托盘连同托举板上的托盘一起被托举组件支撑,在通过液压缸驱动,使托举板带动叠放的托盘向上移动一个托盘厚度大小的距离,再次将两个扣板相互靠近,从叠放的托盘底部将整摞托盘托起,至此将摆满样本保存管托盘的叠放操作,通过托运组件将托举组件送至存放柜中部,通过液压缸驱动,将托举板升高到存放柜中部功能区叠放的空闲托盘底部,将托住空闲托盘底部的两个扣板移开,将托举板托举所有空闲托盘向下移动一个托盘厚度的距离,再将两个扣板相互靠近从叠放的倒数第二个空闲托盘底部将除最底部一个托盘外的其他空闲托盘托起,通过液压缸驱动,向下移动托举板,托举板带动最下方一个空闲托盘向下移动,再次通过托运组件将托举组件连同空闲托盘送至摆放组件处;步骤三:当该机器人存放柜内所有空闲托盘都存放有样本保存管后或者当存放柜中有样本快要超过设定存放时间后,通过plc控制器一进行控制,使行走驱动电机带动行走轮转动,通过行走轮转动,使行走组件行进,通过行走组件带动该机器人行走,按照plc控制器一种设定的行进路线,使该机器人带动存放柜向检验科室移动,将粪便肠道菌群样本快速送到检验科室,检验科室人员有权限打开该机器人存放柜的柜门,直接将存放有样本的托盘一个一个取出。
15.本发明的有益效果:(1)本发明中,该机器人通过对受试者提取的样本进行存放,并自动将受试者的样本送至检验处,整个过程不需要送检医护人员参与,从而大大减轻了前台送检医护人员的工作量,该机器人通过人脸识别受试者身份,并通过摆放组件对受试者提取的样本进行分类存放,从而进一步减轻前台送检医护人员的工作负担,根据机器人上人脸识别系统确认受试者身份信息,通过plc控制器二实现自动摆放,从而使该机器人更加智能,同时,也使该机器人对受试者提取的样本管理更加方便,比人工方式,更加不易出错,一方面,降低了样本混淆的可能,提高了该机器人使用的可靠性,另一方面,检验科的人员检测样本时,也更加的方便不易出错,大大减轻检验科医护人员的工作强度,且该机器人可以被布置在厕所旁边,使受试者在提取到样本后,能够更加快速以及更加方便的将样本送出,减少了受试者寻找送检医护人员的时间,从而提高该机器人使用的效率,同时,也提高了受试者使用的便利性,该机器人通过设置存放柜,一方面,能够收取大量的样本,从而提高该机器人对样本的转送能力,另一方面,受试者将样本放入后,非检验科人员无权打开,进而使样本能更加安全以及更加可靠的被送至检验处,从而避免出现不相干人员将样本破坏的情况。
16.(2)本发明中,该机器人通过设置制冷压缩机进行制冷,使存放柜中的样本内的菌群不易受损,从而使检验科对样本检测的结果更加准确,通过托运组件和托举组件配合,使该机器人能够对摆放满的托盘进行堆叠,并自动取出空闲托盘供摆放组件继续摆放样本,一方面,使该存放柜能够存放更多样本,提高该存放柜的存放能力,从而进一步提高该机器人转送样本的能力,另一方面,实现对样本存放的有序整理,使存放的样本不会在存放柜内挤压,保证了样本的安全,同时,也使检验科人员能够按照托盘整盘取出样本,进而减少了检验科医护人员整理样本的时间,从而进一步提高检验科医护人员使用的便利性,同时,也使检验科人员能够更快的进行检验工作,提高样本的检测速度。
17.(3)本发明中,通过使用plc控制器一对该机器人的行走组件进行控制,使该机器人能自动寻找路线移动,从而进一步提高该机器人使用的智能化程度,通过plc控制器一和
plc控制器二的配合使用,使该机器人对送检每个环节花费的时间控制的更加精准,进而使该机器人更加容易的去设定送检频率,从而使该机器人在保证样本不会失效的前提下,能一次性转送更多的样本,通过在行走组件上安装防碰撞超声波传感器、摄像头以及激光雷达,使该机器人送检路线能够规划的更加合理,使送检速度更快,从而进一步提高该机器人的使用效率,同时,也使该机器人送检过程更加安全,不会发生碰撞,从而提高该机器人使用的可靠性。
附图说明
18.下面结合附图和实施例对本发明进一步说明。
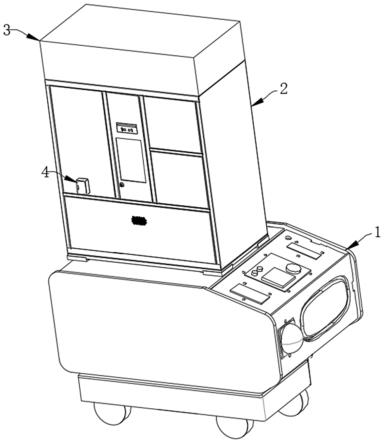
19.图1为本发明整体结构示意图。
20.图2为本发明行走组件结构示意图。
21.图3为本发明行走组件去除行走车体结构示意图。
22.图4为本发明存放柜内部结构示意图。
23.图5为图4中a区域细节放大图。
24.图6为本发明托盘结构示意图。
25.图7为本发明托运组件结构示意图。
26.图8为本发明托举组件结构示意图。
27.图9为本发明扣紧组件结构示意图。
28.图中:1、行走组件;101、行走底架;102、行走轮;103、行走驱动电机;104、行走车体;2、存放柜;201、上下隔板;3、制冷压缩机;4、存放通道;5、摆放组件;501、前后移动轨板;502、左右移动轨板;503、左右移板;504、升降轨板;505、电动夹持器;6、托盘;601、顶杆;7、托运组件;701、底板;702、传动链;703、载板;704、托运驱动电机;8、托举组件;801、液压缸;802、液压杆;803、托举板;9、扣紧组件;901、移动顶架;902、滑轨;903、双向丝杠;904、紧扣驱动电机;905、移块;906、滑块;907、螺母;908、扣板;10、样本筒。
具体实施方式
29.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
30.如图1-图9所示,本发明所述的一种粪便肠道菌群样本快速送检机器人,包括行走组件1、存放柜2和制冷压缩机3(型号:lfk-4hp),行走组件1的顶部安装有存放柜2,存放柜2的顶部安装有制冷压缩机3,其中,存放柜2中部偏下处水平设置有上下隔板201,存放柜2通过上下隔板201分隔出上下两个腔室,存放柜2的上腔室通过两个竖板分隔出三个功能空间,上下隔板201对应三个功能空间处均开设有通孔,存放柜2其中一端的功能空间内设置有摆放组件5,存放柜2的另外两个功能空间的顶部内壁均固定有扣紧组件9,两个扣紧组件9上均紧扣有若干个上下叠放的托盘6,存放柜2的下腔室内安装有托运组件7,托运组件7上安装有托举组件8,存放柜2外侧安装有存放通道4,存放通道4与安装摆放组件5的工作空间对应,存放柜2一侧安装有与两个上下腔室对应的柜门,该机器人通过对受试者提取的样本进行存放,并自动将受试者的样本送至检验处,整个过程不需要送检医护人员参与,从而大大减轻了前台送检医护人员的工作量,该机器人可以被布置在厕所旁边,使受试者在提取
到样本后,能够更加快速以及更加方便的将样本送出,减少了受试者寻找送检医护人员的时间,从而提高该机器人使用的效率,同时,也提高了受试者使用的便利性,该机器人通过设置存放柜2,一方面,能够收取大量的样本,从而提高该机器人对样本的转送能力,另一方面,受试者将样本放入后,非检验科人员无权打开,进而使样本能更加安全以及更加可靠的被送至检验处,从而避免出现不相干人员将样本破坏的情况,该机器人通过设置制冷压缩机3进行制冷,使存放柜2中的样本内的菌群不易受损,从而使检验科对样本检测的结果更加准确,通过托运组件7和托举组件8配合,使该机器人能够对摆放满的托盘6进行堆叠,并自动取出空闲托盘6供摆放组件5继续摆放样本,一方面,使该存放柜2能够存放更多样本,提高该存放柜2的存放能力,从而进一步提高该机器人转送样本的能力,另一方面,实现对样本存放的有序整理,使存放的样本不会在存放柜2内挤压,保证了样本的安全,同时,也使检验科人员能够按照托盘6整盘取出样本,进而减少了检验科医护人员整理样本的时间,从而进一步提高检验科医护人员使用的便利性,同时,也使检验科人员能够更快的进行检验工作,提高样本的检测速度;其中,摆放组件5包括两个前后移动轨板501、一个左右移动轨板502和一个升降轨板504,两个前后移动轨板501呈平行设置,左右移动轨板502移动配合在前后移动轨板501上,左右移动轨板502上左右移动配合有左右移板503,左右移板503远离左右移动轨板502的一侧升降配合有升降轨板504,升降轨板504的底部安装有电动夹持器505。
31.本发明实施例的一个可选实施方式中,行走组件1包括行走底架101和行走车体104,行走车体104为箱体结构,且行走车体104通过若干个固定支杆安装在行走底架101顶部,行走底架101底部两侧均安装有一对行走轮102,行走底架101的底部安装有两个分别驱动两对行走轮102转动的行走驱动电机103。
32.本发明实施例的一个可选实施方式中,行走车体104内设置有蓄电池以及控制车辆行进的plc控制器一(型号:c200hs),行走车体104周侧安装有防碰撞超声波传感器(型号:kt40-r1602),行走车体104前后端部均安装有可转动的摄像头,行走车体104一端顶部安装有激光雷达(型号:s10b-9011ba),plc控制器一控制行走驱动电机106,且plc控制器通过通讯线路分别与防碰撞超声波传感器、摄像头以及激光雷达连接,通过使用plc控制器一对该机器人的行走组件1进行控制,使该机器人能自动寻找路线移动,从而进一步提高该机器人使用的智能化程度,通过plc控制器一和plc控制器二(型号:c200hs)的配合使用,使该机器人对送检每个环节花费的时间控制的更加精准,进而使该机器人更加容易的去设定送检频率,从而使该机器人在保证样本不会失效的前提下,能一次性转送更多的样本,通过在行走组件1上安装防碰撞超声波传感器、摄像头以及激光雷达,使该机器人送检路线能够规划的更加合理,使送检速度更快,从而进一步提高该机器人的使用效率,同时,也使该机器人送检过程更加安全,不会发生碰撞,从而提高该机器人使用的可靠性。
33.本发明实施例的一个可选实施方式中,两个前后移动轨板501均传送配合有传送带,两个传送带从左右移动轨板502两端带动左右移动轨板502移动,左右移动轨板502上转动配合有丝杆一,左右移板503与左右移动轨板502相扣,左右移板503通过与丝杆一螺纹配合在左右移动轨板502上移动,升降轨板504一侧竖直转动配合有与左右移板503螺纹配合的丝杆二,升降轨板504通过丝杆二升降配合在左右移板503一侧,通过前后移动轨板501、左右移动轨板502和升降轨板504带动,调节电动夹持器505前后左右以及上下的位置,通过
调节电动夹持器505的位置,将存放通道4内的保存管夹起并排放在托盘6上的样本筒10内。
34.本发明实施例的一个可选实施方式中,托运组件7包括底板701、传动链702和载板703,底板701水平固定在存放柜2下腔室底部,底板701上传动配合有传动链702,底板701一端安装有驱动传动链702传动的托运驱动电机704,载板703滑动配合在底板701顶部,且载板703的底部与传动链702连接,载板703通过传动链702带动移动,通过托运驱动电机704带动,使传动链702传动,传动链702带动载板703移动,通过移动载板703,带动托举组件8移动。
35.本发明实施例的一个可选实施方式中,托举组件8包括液压缸801、液压杆802和托举板803,液压缸801竖直规定在载板703上,液压缸801的顶部设有液压杆802,液压杆802的顶部固定有呈“工”字型结构的托举板803,且托举板803呈水平设置,托举板803顶部开设有与托盘6大小相适配的凹槽,通过液压缸801带动,使液压杆802移动,通过移动液压杆802,调节托举板803的高度,通过将托举板803设置为“工”字型结构,使扣板908能够从托举板803两侧将托盘6托起,通过在托举板803上设置凹槽,使托盘6在托举板803上不易动,更加稳定,保证了托举组件8以及托运组件7运送托盘6的可靠性和安全性。
36.本发明实施例的一个可选实施方式中,托盘6的顶部等间距设置有若干个样本筒10,样本筒10内设置有开设有若干个可存放试管和样本管的置物槽,通过在一个样本筒10上设置多个置物槽,方便将一位受试者的多个样本集中存放在一起,避免受试者样本混淆,托盘6的底部设置固定有若干个杠铃状的顶杆601,顶杆601的高度大于样本筒10的高度,托盘6顶部位于样本筒10的间隙处设置有数量与顶杆601数量相同位置与顶杆601位置相同的环状底座,多个托盘6堆叠时,上方托盘6底部的顶杆601插入下方托盘6顶部的环状底座内,通过设置顶杆601,使托盘6在堆叠时不会挤压样本筒10和样本筒10内的样本,通过设置环状底座与顶杆601适配,使托盘6堆叠后不会向一侧偏移,保证堆叠的稳定和可靠。
37.本发明实施例的一个可选实施方式中,扣紧组件9包括移动顶架901、双向丝杠903和两个移块905,移动顶架901呈倒置的“u”字型结构,移动顶架901的底部焊接有滑轨902,移动顶架901的靠近滑轨902的一侧转动配合有双向丝杠903,移动顶架901一端安装有驱动双向丝杠903转动的紧扣驱动电机904,两个移块905的顶部均焊接有与滑轨902滑动配合的滑块906,两个移块905均通过滑块906滑动配合在移动顶架901底部,两个移块905一侧均焊接有与双向丝杠903螺纹配合的螺母907,且两个螺母907分别位于双向丝杠903正螺纹一端和反螺纹一端,两个移块905的底部均焊接有呈“l”型结构的扣板908,两个扣板908呈对称设置,堆叠一起的若干个托盘6通过两个扣板908勾起,通过紧扣驱动电机904带动双向丝杠903转动,双向丝杠903两端为反向的螺纹,所以使两个移块905呈相向或者反向同步移动,进而使两个扣板908实现相互靠近或者相互远离的动作,使两个扣板908能够从底部托起堆叠的托盘6以及能够从堆叠的托盘6底部抽出。
38.本发明实施例的一个可选实施方式中,存放柜2安装有存放通道4的一侧设置有人脸识别摄像头,存放柜2一侧位于人脸识别摄像头下方安装有触控显示面板,存放柜2上安装有播报音响,存放柜2顶部的制冷压缩机3向存放柜2上腔室提供冷源,存放柜2中安装有plc控制器二,存放通道4上安装有通过plc控制器二控制的通道门,通过存放柜2上的人脸识别系统,确认受试者身份,并通过plc控制器二控制,将存放通道4打开,受试者将保存管放入存放通道4内,通过人脸识别受试者身份,并通过摆放组件5对受试者提取的样本进行
分类存放,从而进一步减轻前台送检医护人员的工作负担,根据机器人上人脸识别系统确认受试者身份信息,通过plc控制器二实现自动摆放,从而使该机器人更加智能,同时,也使该机器人对受试者提取的样本管理更加方便,比人工方式,更加不易出错,一方面,降低了样本混淆的可能,提高了该机器人使用的可靠性,另一方面,检验科的人员检测样本时,也更加的方便不易出错,大大减轻检验科医护人员的工作强度,通过播报音响播送样本采集方法以及该机器人的自助使用方法。
39.本发明实施例的一个可选实施方式中,该粪便肠道菌群样本快速送检机器人的使用方法具体包括以下步骤:步骤一:将该机器人停放在医院厕所旁边,采集新鲜的粪便样本后,放入无菌保存管中,受试者拿着存有粪便肠道菌群样本的保存管来到该机器人旁,通过存放柜2上的人脸识别系统,确认受试者身份,并通过plc控制器二控制,将存放通道4打开,受试者将保存管放入存放通道4内,通过前后移动轨板501、左右移动轨板502和升降轨板504带动,调节电动夹持器505前后左右以及上下的位置,通过调节电动夹持器505的位置,将存放通道4内的保存管夹起并排放在托盘6上的样本筒10内,该托盘6通过托举组件8支撑在摆放组件5下方;步骤二:托举组件8上托盘6摆满保存管后,通过液压缸801带动,使液压杆802移动,通过移动液压杆802,调节托举板803的高度,将托举板803向下调节,使托举板803以及托举板803上托盘6进入存放柜2的下腔室,通过托运驱动电机704带动,使传动链702传动,传动链702带动载板703移动,通过移动载板703,带动托举组件8移动,移动托举组件8到另一端,再次通过液压缸801驱动,将托举板803连同托盘6向上送入存放柜2上腔室用于存放样本的功能空间内最低处后停下,此时,通过该功能空间内的紧扣驱动电机904驱动,使两个扣板908反向移动,使扣板908从叠放的托盘6底部脱离,叠放的托盘6连同托举板803上的托盘6一起被托举组件8支撑,在通过液压缸801驱动,使托举板803带动叠放的托盘6向上移动一个托盘6厚度大小的距离,再次将两个扣板908相互靠近,从叠放的托盘6底部将整摞托盘6托起,至此将摆满样本保存管托盘6的叠放操作,通过托运组件7将托举组件8送至存放柜2中部,通过液压缸801驱动,将托举板803升高到存放柜2中部功能区叠放的空闲托盘6底部,将托住空闲托盘6底部的两个扣板908移开,将托举板803托举所有空闲托盘6向下移动一个托盘6厚度的距离,再将两个扣板908相互靠近从叠放的倒数第二个空闲托盘6底部将除最底部一个托盘6外的其他空闲托盘6托起,通过液压缸801驱动,向下移动托举板803,托举板803带动最下方一个空闲托盘6向下移动,再次通过托运组件7将托举组件8连同空闲托盘6送至摆放组件5处;步骤三:当该机器人存放柜2内所有空闲托盘6都存放有样本保存管后或者当存放柜2中有样本快要超过设定存放时间后,通过plc控制器一进行控制,使行走驱动电机106带动行走轮102转动,通过行走轮102转动,使行走组件1行进,通过行走组件1带动该机器人行走,按照plc控制器一种设定的行进路线,使该机器人带动存放柜2向检验科室移动,将粪便肠道菌群样本快速送到检验科室,检验科室人员有权限打开该机器人存放柜2的柜门,直接将存放有样本的托盘6一个一个取出。
40.在使用时,首先,将该机器人停放在医院厕所旁边,采集新鲜的粪便样本后,放入无菌保存管中,受试者拿着存有粪便肠道菌群样本的保存管来到该机器人旁,通过存放柜2上的人脸识别系统,确认受试者身份,并通过plc控制器二控制,将存放通道4打开,受试者
将保存管放入存放通道4内,通过前后移动轨板501、左右移动轨板502和升降轨板504带动,调节电动夹持器505前后左右以及上下的位置,通过调节电动夹持器505的位置,将存放通道4内的保存管夹起并排放在托盘6上的样本筒10内,该托盘6通过托举组件8支撑在摆放组件5下方,该机器人通过对受试者提取的样本进行存放,并自动将受试者的样本送至检验处,整个过程不需要送检医护人员参与,从而大大减轻了前台送检医护人员的工作量,该机器人通过人脸识别受试者身份,并通过摆放组件5对受试者提取的样本进行分类存放,从而进一步减轻前台送检医护人员的工作负担,根据机器人上人脸识别系统确认受试者身份信息,通过plc控制器二实现自动摆放,从而使该机器人更加智能,同时,也使该机器人对受试者提取的样本管理更加方便,比人工方式,更加不易出错,一方面,降低了样本混淆的可能,提高了该机器人使用的可靠性,另一方面,检验科的人员检测样本时,也更加的方便不易出错,大大减轻检验科医护人员的工作强度,且该机器人可以被布置在厕所旁边,使受试者在提取到样本后,能够更加快速以及更加方便的将样本送出,减少了受试者寻找送检医护人员的时间,从而提高该机器人使用的效率,同时,也提高了受试者使用的便利性,该机器人通过设置存放柜2,一方面,能够收取大量的样本,从而提高该机器人对样本的转送能力,另一方面,受试者将样本放入后,非检验科人员无权打开,进而使样本能更加安全以及更加可靠的被送至检验处,从而避免出现不相干人员将样本破坏的情况,然后,托举组件8上托盘6摆满保存管后,通过液压缸801带动,使液压杆802移动,通过移动液压杆802,调节托举板803的高度,将托举板803向下调节,使托举板803以及托举板803上托盘6进入存放柜2的下腔室,通过托运驱动电机704带动,使传动链702传动,传动链702带动载板703移动,通过移动载板703,带动托举组件8移动,移动托举组件8到另一端,再次通过液压缸801驱动,将托举板803连同托盘6向上送入存放柜2上腔室用于存放样本的功能空间内最低处后停下,此时,通过该功能空间内的紧扣驱动电机904驱动,使两个扣板908反向移动,使扣板908从叠放的托盘6底部脱离,叠放的托盘6连同托举板803上的托盘6一起被托举组件8支撑,在通过液压缸801驱动,使托举板803带动叠放的托盘6向上移动一个托盘6厚度大小的距离,再次将两个扣板908相互靠近,从叠放的托盘6底部将整摞托盘6托起,至此将摆满样本保存管托盘6的叠放操作,通过托运组件7将托举组件8送至存放柜2中部,通过液压缸801驱动,将托举板803升高到存放柜2中部功能区叠放的空闲托盘6底部,将托住空闲托盘6底部的两个扣板908移开,将托举板803托举所有空闲托盘6向下移动一个托盘6厚度的距离,再将两个扣板908相互靠近从叠放的倒数第二个空闲托盘6底部将除最底部一个托盘6外的其他空闲托盘6托起,通过液压缸801驱动,向下移动托举板803,托举板803带动最下方一个空闲托盘6向下移动,再次通过托运组件7将托举组件8连同空闲托盘6送至摆放组件5处,该机器人通过设置制冷压缩机3进行制冷,使存放柜2中的样本内的菌群不易受损,从而使检验科对样本检测的结果更加准确,通过托运组件7和托举组件8配合,使该机器人能够对摆放满的托盘6进行堆叠,并自动取出空闲托盘6供摆放组件5继续摆放样本,一方面,使该存放柜2能够存放更多样本,提高该存放柜2的存放能力,从而进一步提高该机器人转送样本的能力,另一方面,实现对样本存放的有序整理,使存放的样本不会在存放柜2内挤压,保证了样本的安全,同时,也使检验科人员能够按照托盘6整盘取出样本,进而减少了检验科医护人员整理样本的时间,从而进一步提高检验科医护人员使用的便利性,同时,也使检验科人员能够更快的进行检验工作,提高样本的检测速度,最后,当该机器人存放柜2内所有空闲托盘6都
存放有样本保存管后或者当存放柜2中有样本快要超过设定存放时间后,通过plc控制器一进行控制,通过plc控制器一进行控制,使行走驱动电机106带动行走轮102转动,通过行走轮102转动,使行走组件1行进,通过行走组件1带动该机器人行走,按照plc控制器一种设定的行进路线,使该机器人带动存放柜2向检验科室移动,将粪便肠道菌群样本快速送到检验科室,检验科室人员有权限打开该机器人存放柜2的柜门,直接将存放有样本的托盘6一个一个取出,通过使用plc控制器一对该机器人的行走组件1进行控制,使该机器人能自动寻找路线移动,从而进一步提高该机器人使用的智能化程度,通过plc控制器一和plc控制器二的配合使用,使该机器人对送检每个环节花费的时间控制的更加精准,进而使该机器人更加容易的去设定送检频率,从而使该机器人在保证样本不会失效的前提下,能一次性转送更多的样本,通过在行走组件1上安装防碰撞超声波传感器、摄像头以及激光雷达,使该机器人送检路线能够规划的更加合理,使送检速度更快,从而进一步提高该机器人的使用效率,同时,也使该机器人送检过程更加安全,不会发生碰撞,从而提高该机器人使用的可靠性。
41.以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施方式和说明书中的描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入本发明要求保护的范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1