基于毫米波雷达和激光雷达的汽车自开门防撞系统及方法与流程
1.本发明涉及智能汽车技术领域,具体涉及一种基于毫米波雷达和激光雷达的汽车自开门防撞系统及方法。
背景技术:
2.随着汽车的普及,发生的交通安全事故也越来越多,其中,因疏忽大意、未观察到车门附近行人或车辆而直接开车门,造成人员、车辆撞门的安全事故,在交通事故中占了很大比例。因此,如何防止撞门交通事故的发生,是本领域技术人员目前需要解决的技术问题。
3.另外,随着汽车保有量的增加,城市内有限的停车位间距设计虽然可以满足绝大多数汽车的乘员开启车门上下车的便利性,但是汽车种类的差异导致车身宽度千差万别,如果按照最大乘用车尺寸设计城市内两两平行的停车位空间,必然造成资源浪费。为尽可能多的满足停车需求,目前市内停车位的空间仅为够用,谈不上宽敞。并且,如果再遇到个别司机不规范停车现象,无法保证实际尽可能的等间距停车,必然会导致个别车位空间狭小,乘员下车时由于未留意空间大小导致突然大角度开启车门造成不必要的双方汽车损伤。为此开发汽车自动控制车门开启角度防撞装置非常有必要。
技术实现要素:
4.本发明主要是为了解决车门开启过程中容易因疏忽大意造成人员、车辆撞门的安全事故的问题,提出了一种基于毫米波雷达和激光雷达的汽车自开门防撞系统,包括依次连接的障碍物探测装置、a/d数模转换器、dsp处理器和角度控制器,障碍物探测装置包括安装在车门下端装饰板的毫米波雷达及安装在车窗b柱饰板和前三角饰板的激光雷达,通过本系统实现车门周围障碍物感应,获取车门周围障碍物的角度信息,根据车门周围障碍物的角度信息控制车门的开启角度,或控制车门不开启,或控制车门暂停开启,防止汽车自开门过程中发生撞门交通安全事故。
5.为了实现上述目的,本发明采用以下技术方案:基于毫米波雷达和激光雷达的汽车自开门防撞系统,包括依次连接的障碍物探测装置、a/d数模转换器、dsp处理器和角度控制器,所述障碍物探测装置、a/d数模转换器、dsp处理器和角度控制器均与车载控制单元电性连接;所述障碍物探测装置包括安装在车门下端装饰板的毫米波雷达及安装在车窗b柱饰板和前三角饰板的激光雷达,所述毫米波雷达和所述激光雷达均包括芯片及与所述芯片耦接的发射天线和至少两个接收天线,所述毫米波雷达和所述激光雷达均通过所述芯片控制所述发射天线发射电磁波信号及控制所述接收天线接收电磁波信号,并将所述电磁波信号转换为电信号传输至所述a/d数模转换器。
6.本发明提供了一种基于毫米波雷达和激光雷达的汽车自开门防撞系统,包括依次连接的障碍物探测装置、a/d数模转换器、dsp处理器和角度控制器,障碍物探测装置、a/d数模转换器、dsp处理器和角度控制器均与车载控制单元电性连接,障碍物探测装置包括毫米
波雷达和激光雷达,车门下端装饰板由塑料制成,设有安装孔,毫米波雷达设置于安装孔内,毫米波雷达包括第一芯片及与第一芯片耦接的第一发射天线和至少两个第一接收天线,通过第一芯片控制第一发射天线发射电磁波信号及控制第一接收天线接收电磁波信号,并将电磁波信号转换为电信号传输至a/d数模转换器,实现车门下端障碍物感应;车窗b柱饰板和前三角饰板由红透pc材料制成,无需开孔,激光雷达安装在饰板背后,激光雷达包括第二芯片及与第二芯片耦接的第二发射天线和至少两个第二接收天线,通过第二芯片控制第二发射天线发射电磁波信号及控制第二接收天线接收电磁波信号,并将电磁波信号转换为电信号传输至a/d数模转换器,实现车门上端障碍物感应;a/d数模转换器将电信号转换为数字信号;dsp处理器对数字信号进行处理,获得车门周围障碍物的角度信息;角度控制器根据车门周围障碍物的角度信息,控制车门的开启角度,或控制车门不开启,或控制车门暂停开启。当有自动开启车门请求时,通过本系统实现对车门周围障碍物的识别感应,并根据车门周围障碍物的情况自动控制车门的开启角度,或控制车门暂时不开启;在车门开启过程中,继续对车门周围障碍物进行识别感应,并根据车门周围障碍物的情况控制车门是否暂停开启。本系统可以防止汽车自开门过程中发生人员、车辆撞门的交通安全事故,同时避免汽车停靠后乘员下车时由于未留意空间大小导致突然大角度开启车门造成不必要的双方汽车损伤。
7.作为优选,所述a/d数模转换器用于对接收到的电信号进行采样、频谱分析,转换为相应的数字信号,并将所述数字信号传输给所述dsp处理器。
8.作为优选,所述dsp处理器用于对接收到的数字信号进行计算处理,获得车门周围障碍物的角度信息,并将所述车门周围障碍物的角度信息传输给所述角度控制器。
9.作为优选,所述角度控制器用于根据接收到的车门周围障碍物的角度信息自动控制车门的开启角度。当有自动开启车门请求时,获取车门周围障碍物的角度信息,角度控制器据此控制车门的开启角度,或控制车门暂时不开启;在车门开启过程中,继续获取车门周围障碍物的角度信息,角度控制器据此控制车门是否暂停开启。
10.作为优选,所述角度控制器设置在车门铰链处。角度控制器设置在车门铰链处,用于控制车门的开启角度,或控制车门不开启,或控制车门暂停开启。
11.作为优选,所述车门下端装饰板采用塑料制成。由于车门下端装饰板是塑料制成的,可以做开孔处理,利于毫米波雷达布局,实现车门下端物体或人的感应。
12.作为优选,所述车窗b柱饰板和前三角饰板采用红透pc材料制成。车窗b柱饰板和前三角饰板采用红透pc材料,激光雷达可以安装在饰板背后,无需开孔,通过穿透材料实现车门上端物体或人的感应。
13.基于毫米波雷达和激光雷达的汽车自开门防撞方法,适用于上述的基于毫米波雷达和激光雷达的汽车自开门防撞系统,包括以下步骤:步骤s1:在车门下端装饰板安装毫米波雷达,在车窗b柱饰板和前三角饰板安装激光雷达;步骤s2:当有自动开启车门请求时,开始探测车门周围障碍物的角度信息;步骤s3:根据车门周围障碍物的角度信息自动控制车门的开启角度。
14.本发明还提供了一种基于毫米波雷达和激光雷达的汽车自开门防撞方法,先在塑料制成的车门下端装饰板设安装孔,在安装孔内安装毫米波雷达,在红透pc材料制成的车
窗b柱饰板和前三角饰板背后安装激光雷达;当有自动开启车门请求时,对车门周围障碍物进行识别感应,获取车门周围障碍物的角度信息;根据车门周围障碍物的角度信息自动控制车门的开启角度,或控制车门暂时不开启;在车门开启过程中,继续对车门周围障碍物进行识别感应,获取车门周围障碍物的角度信息,并根据车门周围障碍物的角度信息控制车门是否暂停开启。本方法实现对车门周围障碍物的识别感应,避免车门在开启过程中与障碍物发生撞击,提高安全性和可靠性,同时使自动驾驶汽车更加智能化,提升用户使用体验感。
15.作为优选,步骤s2的具体过程,包括以下步骤:步骤s21:当有自动开启车门请求时,毫米波雷达和激光雷达开始工作,通过芯片控制发射天线发射电磁波信号,控制接收天线接收电磁波信号,将电磁波信号转换为电信号并传输给a/d数模转换器;步骤s22:a/d数模转换器对所述电信号进行采样、频谱分析,转换为数字信号并传输给dsp处理器;步骤s23:dsp处理器对所述数字信号进行计算处理,获得车门周围障碍物的角度信息并传输给角度控制器;步骤s24:角度控制器根据接收到的车门周围障碍物的角度信息自动控制车门的开启角度。
16.当有自动开启车门请求时,毫米波雷达通过第一芯片控制第一发射天线发射电磁波信号及控制第一接收天线接收电磁波信号,并将电磁波信号转换为电信号传输至a/d数模转换器,实现车门下端障碍物感应;激光雷达通过第二芯片控制第二发射天线发射电磁波信号及控制第二接收天线接收电磁波信号,并将电磁波信号转换为电信号传输至a/d数模转换器,实现车门上端障碍物感应;a/d数模转换器将电信号转换为数字信号;dsp处理器对数字信号进行处理,获得车门周围障碍物的角度信息;角度控制器根据车门周围障碍物的角度信息,控制车门的开启角度,或控制车门不开启,或控制车门暂停开启。
17.作为优选,步骤s24的具体过程,包括以下步骤:步骤s241:获取训练样本,所述训练样本包括历史车门周围障碍物角度信息及对应的历史车门开启角度;步骤s242:构建初始神经网络模型;步骤s243:使用训练样本训练初始神经网络模型的训练参数,并使用损失函数进行优化,得到目标神经网络模型;步骤s244:将角度控制器接收到的实时车门周围障碍物角度信息输入目标神经网络模型,目标神经网络模型输出对应的实时车门开启角度;步骤s245:角度控制器按照目标神经网络模型输出的实时车门开启角度自动控制车门的开启程度。
18.初始神经网络模型包括神经网络滤波器、神经网络编码器和激活函数输出层,神经网络滤波器包括可参数化的带通滤波器,可参数化的带通滤波器通过训练卷积带通滤波器的训练参数获得。通过训练初始神经网络模型,获得目标神经网络模型,用于获取实时车门周围障碍物角度信息对应的实时车门开启角度,以便角度控制器根据实时车门开启角度自动控制车门开启,更加安全、可靠、高效、精准、智能。
19.因此,本发明的优点是:(1)当有自动开启车门请求时,通过本发明实现对车门周围障碍物的识别感应,并根据车门周围障碍物的情况自动控制车门的开启角度,或控制车门暂时不开启;在车门开启过程中,继续对车门周围障碍物进行识别感应,并根据车门周围障碍物的情况控制车门是否暂停开启,防止汽车自开门过程中发生人员、车辆撞门的交通安全事故,同时避免汽车停靠后乘员下车时由于未留意空间大小导致突然大角度开启车门造成不必要的双方汽车损伤,提高安全性和可靠性;(2)通过目标神经网络模型,输出实时车门开启角度,高效化、精确化、智能化。
附图说明
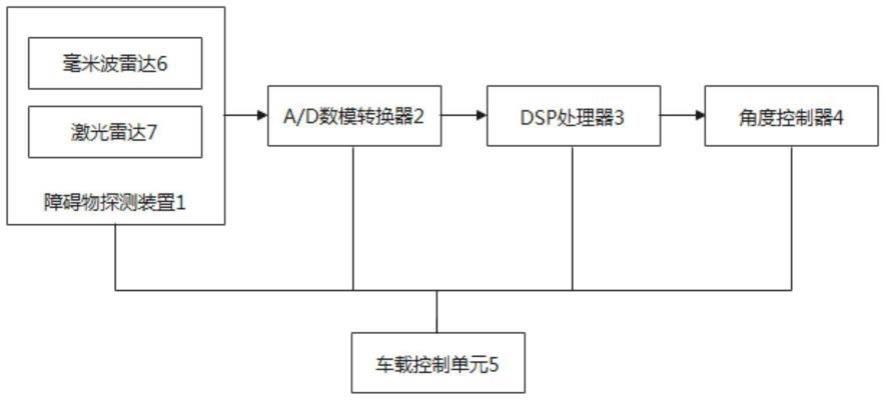
20.图1是本发明实施例一中基于毫米波雷达和激光雷达的汽车自开门防撞系统的结构示意图。
21.图2是本发明实施例一中毫米波雷达和激光雷达的布局示意图。
22.图3是本发明实施例一中发射天线发射电磁波和接收天线接收电磁波的示意图。
23.图4是本发明实施例二中基于毫米波雷达和激光雷达的汽车自开门防撞方法的流程图。
[0024] 1、障碍物探测装置 2、a/d数模转换器 3、dsp处理器 4、角度控制器 5、车载控制单元 6、毫米波雷达 7、激光雷达 8、车门下端装饰板 9、车窗b柱饰板 10、前三角饰板 11、发射天线 12、接收天线。
具体实施方式
[0025]
下面结合附图与具体实施方式对本实施例做进一步的描述。
[0026]
实施例一:基于毫米波雷达和激光雷达的汽车自开门防撞系统,如图1所示,包括依次连接的障碍物探测装置1、a/d数模转换器2、dsp处理器3和角度控制器4,障碍物探测装置1、a/d数模转换器2、dsp处理器3和角度控制器4均与车载控制单元5电性连接;障碍物探测装置1包括安装在车门下端装饰板8的毫米波雷达6及安装在车窗b柱饰板9和前三角饰板10的激光雷达7,如图3所示,毫米波雷达6和激光雷达7均包括芯片及与芯片耦接的发射天线11和至少两个接收天线12,毫米波雷达6和激光雷达7均通过芯片控制发射天线11发射电磁波信号及控制接收天线12接收电磁波信号,并将电磁波信号转换为电信号传输至a/d数模转换器2。
[0027]
本实施例提供了一种基于毫米波雷达和激光雷达的汽车自开门防撞系统,包括依次连接的障碍物探测装置1、a/d数模转换器2、dsp处理器3和角度控制器4,障碍物探测装置1、a/d数模转换器2、dsp处理器3和角度控制器4均与车载控制单元5电性连接,障碍物探测装置1包括毫米波雷达6和激光雷达7,如图2所示,车门下端装饰板8由塑料制成,设有安装孔,毫米波雷达6设置于安装孔内,毫米波雷达6包括第一芯片及与第一芯片耦接的第一发射天线和至少两个第一接收天线,通过第一芯片控制第一发射天线发射电磁波信号及控制第一接收天线接收电磁波信号,并将电磁波信号转换为电信号传输至a/d数模转换器2,实现车门下端障碍物感应;车窗b柱饰板9和前三角饰板10由红透pc材料制成,无需开孔,激光
雷达7安装在饰板背后,激光雷达7包括第二芯片及与第二芯片耦接的第二发射天线和至少两个第二接收天线,通过第二芯片控制第二发射天线发射电磁波信号及控制第二接收天线接收电磁波信号,并将电磁波信号转换为电信号传输至a/d数模转换器2,实现车门上端障碍物感应;a/d数模转换器2对接收到的电信号进行采样、频谱分析,转换为相应的数字信号,并将数字信号传输给dsp处理器3;dsp处理器3对接收到的数字信号进行计算处理,获得车门周围障碍物的角度信息,并将车门周围障碍物的角度信息传输给角度控制器4;角度控制器4设置在车门铰链处,根据车门周围障碍物的角度信息,控制车门的开启角度,或控制车门不开启,或控制车门暂停开启。当有自动开启车门请求时,通过本系统实现对车门周围障碍物的识别感应,并根据车门周围障碍物的情况自动控制车门的开启角度,或控制车门暂时不开启;在车门开启过程中,继续对车门周围障碍物进行识别感应,并根据车门周围障碍物的情况控制车门是否暂停开启。
[0028]
实施例二:基于毫米波雷达和激光雷达的汽车自开门防撞方法,适用于上述的基于毫米波雷达和激光雷达的汽车自开门防撞系统,如图4所示,包括以下步骤:步骤s1:在车门下端装饰板安装毫米波雷达,在车窗b柱饰板和前三角饰板安装激光雷达;步骤s2:当有自动开启车门请求时,开始探测车门周围障碍物的角度信息;步骤s3:根据车门周围障碍物的角度信息自动控制车门的开启角度。
[0029]
本实施例还提供了一种基于毫米波雷达和激光雷达的汽车自开门防撞方法,先在塑料制成的车门下端装饰板设安装孔,在安装孔内安装毫米波雷达,在红透pc材料制成的车窗b柱饰板和前三角饰板背后安装激光雷达;当有自动开启车门请求时,对车门周围障碍物进行识别感应,获取车门周围障碍物的角度信息;根据车门周围障碍物的角度信息自动控制车门的开启角度,或控制车门暂时不开启;在车门开启过程中,继续对车门周围障碍物进行识别感应,获取车门周围障碍物的角度信息,并根据车门周围障碍物的角度信息控制车门是否暂停开启。
[0030]
步骤s2的具体过程,包括以下步骤:步骤s21:当有自动开启车门请求时,毫米波雷达和激光雷达开始工作,通过芯片控制发射天线发射电磁波信号,控制接收天线接收电磁波信号,将电磁波信号转换为电信号并传输给a/d数模转换器;步骤s22:a/d数模转换器对电信号进行采样、频谱分析,转换为数字信号并传输给dsp处理器;步骤s23:dsp处理器对数字信号进行计算处理,获得车门周围障碍物的角度信息并传输给角度控制器;步骤s24:角度控制器根据接收到的车门周围障碍物的角度信息自动控制车门的开启角度。
[0031]
步骤s24的具体过程,包括以下步骤:步骤s241:获取训练样本,训练样本包括历史车门周围障碍物角度信息及对应的历史车门开启角度;步骤s242:构建初始神经网络模型;
步骤s243:使用训练样本训练初始神经网络模型的训练参数,并使用损失函数进行优化,得到目标神经网络模型;步骤s244:将角度控制器接收到的实时车门周围障碍物角度信息输入目标神经网络模型,目标神经网络模型输出对应的实时车门开启角度;步骤s245:角度控制器按照目标神经网络模型输出的实时车门开启角度自动控制车门的开启程度。
[0032]
以上内容,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1