定位方法及装置与流程
本技术涉及定位,特别涉及一种定位方法及装置。
背景技术:
1、随着通信技术的快速发展,通信场景中传输的数据码率越来越大。采用传统的微波通信(如无线通信等)已经不能满足需求。因此,在高速传输场景中,亟需提出一种能够在高速传输的通信场景中对待定位目标进行定位的方法。
2、目前,可以采用相机对目标进行定位,例如,基于单帧图像的定位方法和基于两帧或多帧图像的定位方法。其中,基于单帧图像的定位方法是利用深度学习技术,计算得到物体的位置信息。基于两帧或多帧的定位方法需要对多帧投影图像之间的对应特征元素进行特征匹配,如采用同步定位与建图(simultaneous localization and mapping,slam)方法进行特征匹配,然后根据匹配结果得到目标的定位结果。
3、但是,采用相机对目标进行定位的方法无法同时满足高速传输场景中定位精度和高速传输的要求。
技术实现思路
1、本技术提供了一种定位方法及装置。本技术能够同时满足高速传输场景中对定位精度和高速传输的要求。本技术提供的技术方案如下:
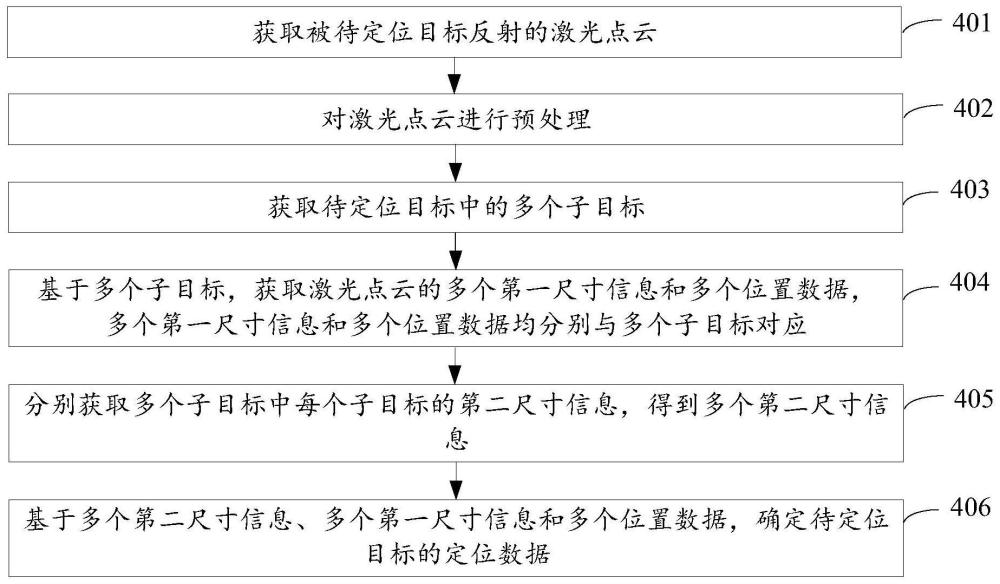
2、第一方面,本技术提供了一种定位方法。该方法包括:获取被待定位目标反射的激光点云;获取激光点云的第一尺寸信息和位置数据;获取待定位目标的第二尺寸信息;基于第一尺寸信息、位置数据与第二尺寸信息,确定待定位目标的定位数据。
3、在本技术提供的定位方法中,基于激光点云对待定位目标进行定位,根据激光点云的第一尺寸信息、位置数据和待定位目标的第二尺寸信息,获取待定位目标的定位数据,能够利用激光高速传输的特性,在高速传输的通信场景中实现对待定位目标的定位。且,在利用激光传输的通信场景中,其后续升级扩容的空间大,且空间光天线增益比微波天线有很大提升(如提升60~90dbi),因此利用激光进行通信对发射功率的要求较低。相应的,降低了对定位使用的激光雷达的要求,使得使用较低成本的激光雷达也能够实现对待定位目标的定位,降低了定位成本。
4、在一种实现方式中,获取待定位目标的第二尺寸信息,包括:获取待定位目标中的多个子目标;分别获取多个子目标中每个子目标的第二尺寸信息,得到多个第二尺寸信息。相应的,获取激光点云的第一尺寸信息和位置数据,包括:基于多个子目标,将激光点云划分至多个点云组,多个点云组与多个子目标对应;分别获取多个点云组中的每个点云组的第一尺寸信息和位置数据,得到多个第一尺寸信息和多个位置数据。基于第一尺寸信息、位置数据与第二尺寸信息,确定待定位目标的定位数据,包括:基于多个第二尺寸信息、多个第一尺寸信息和多个位置数据,确定待定位目标的定位数据。
5、可选的,待定位目标的表面固定有定位标识,激光点云被定位标识反射得到。
6、此时,待定位目标的表面固定有多个定位标识,获取待定位目标中的多个子目标,包括:基于多个定位标识在待定位目标上的部署位置,将待定位目标划分为多个子目标,每个子目标基于一个或多个定位标识划分得到。
7、在一种可实现方式中,基于多个子目标,将激光点云划分至多个点云组,包括:基于多个子目标的部署位置和激光点云中多个激光点的位置,确定与多个子目标中每个子目标对应的激光点,得到与多个子目标对应的多个点云组,每个点云组包括多个激光点。
8、在另一种可实现方式中,基于多个子目标,将激光点云划分至多个点云组,还包括:获取多个子目标中每个子目标的形状特征。相应的,基于多个子目标的部署位置和激光点云中多个激光点的位置,确定与多个子目标中每个子目标对应的激光点,包括:基于多个子目标的部署位置和形状特征,及激光点云中多个激光点的位置,确定与多个子目标中每个子目标对应的激光点。
9、通过在待定位目标的表面固定定位标识,提高了获取到的激光点云的质量,提高了根据激光点云匹配待定位目标的精确度,有利于提高对待定位目标的定位精度,使得该定位方法不仅能够对具有较大尺寸的目标进行定位,还能够对具有较小尺寸的目标进行定位。因此,本技术提供的定位方法能够同时满足高速传输场景中定位精度和高速传输的要求。
10、在一种可实现方式中,定位标识为围绕待定位目标且首尾相连的反光条。
11、可选的,待定位目标的表面固定有多个定位标识,待定位目标在目标投影平面上的正投影的重心,与多个定位标识在目标投影平面上的正投影的重心的平均位置重合,目标投影平面与待定位目标的放置方向垂直。例如,多个定位标识在目标投影平面上的正投影为同心环。
12、并且,多个定位标识中部分或全部的一个或多个目标特征可以对应相同,多个目标特征包括以下部分或全部:反射率、宽度、定位标识与相邻定位标识的间隔。
13、可选的,第一尺寸信息和第二尺寸信息均用于反映宽度。
14、第二方面,本技术提供了一种定位装置,该装置包括:第一获取模块,用于获取被待定位目标反射的激光点云;第二获取模块,用于获取激光点云的第一尺寸信息和位置数据;第三获取模块,用于获取待定位目标的第二尺寸信息;处理模块,用于基于第一尺寸信息、位置数据与第二尺寸信息,确定待定位目标的定位数据。
15、可选的,第三获取模块,具体用于:获取待定位目标中的多个子目标;分别获取多个子目标中每个子目标的第二尺寸信息,得到多个第二尺寸信息。
16、相应的,第二获取模块,具体用于:基于多个子目标,将激光点云划分至多个点云组,多个点云组与多个子目标对应;分别获取多个点云组中的每个点云组的第一尺寸信息和位置数据,得到多个第一尺寸信息和多个位置数据。
17、相应的,处理模块,具体用于:基于多个第二尺寸信息、多个第一尺寸信息和多个位置数据,确定待定位目标的定位数据。
18、可选的,待定位目标的表面固定有定位标识,激光点云被定位标识反射得到。
19、可选的,待定位目标的表面固定有多个定位标识,第三获取模块,具体用于:基于多个定位标识在待定位目标上的部署位置,将待定位目标划分为多个子目标,每个子目标基于一个或多个定位标识划分得到。
20、可选的,第二获取模块,具体用于:基于多个子目标的部署位置和激光点云中多个激光点的位置,确定与多个子目标中每个子目标对应的激光点,得到与多个子目标对应的多个点云组,每个点云组包括多个激光点。
21、可选的,第二获取模块,具体还用于:获取多个子目标中每个子目标的形状特征。
22、相应的,第二获取模块,具体用于:基于多个子目标的部署位置和形状特征,及激光点云中多个激光点的位置,确定与多个子目标中每个子目标对应的激光点。
23、可选的,定位标识为围绕待定位目标且首尾相连的反光条。
24、可选的,待定位目标的表面固定有多个定位标识,待定位目标在目标投影平面上的正投影的重心,与多个定位标识在目标投影平面上的正投影的重心的平均位置重合,目标投影平面与待定位目标的放置方向垂直。
25、可选的,多个定位标识在目标投影平面上的正投影为同心环。
26、可选的,多个定位标识中部分或全部的一个或多个目标特征对应相同,多个目标特征包括以下部分或全部:反射率、宽度、定位标识与相邻定位标识的间隔。
27、可选的,第一尺寸信息和第二尺寸信息均用于反映宽度。
28、第三方面,本技术提供了一种计算机设备,包括存储器和处理器,存储器存储有程序指令,处理器运行程序指令以执行本技术第一方面以及其任一种可能的实现方式中提供的方法。
29、第四方面,本技术提供了一种计算机集群,包括多个计算机设备,多个计算机设备包括多个处理器和多个存储器,多个存储器中存储有程序指令,多个处理器运行程序指令,使得计算机集群执行本技术第一方面以及其任一种可能的实现方式中提供的方法。
30、第五方面,本技术提供了一种计算机可读存储介质,该计算机可读存储介质为非易失性计算机可读存储介质,该计算机可读存储介质包括程序指令,当程序指令在计算机设备上运行时,使得计算机设备执行本技术第一方面以及其任一种可能的实现方式中提供的方法。
31、第六方面,本技术提供了一种包含指令的计算机程序产品,当计算机程序产品在计算机上运行时,使得计算机执行本技术第一方面以及其任一种可能的实现方式中提供的方法。
- 还没有人留言评论。精彩留言会获得点赞!