拖曳式浮游生物偏振成像记录仪
1.本发明属于海洋光学技术领域,特别涉及一种拖曳式浮游生物偏振成像记录仪。
2.
背景技术:
3.浮游生物是海洋食物网的根本,在海洋资源生产中至关重要。但海洋浮游生物种类繁多而且在海洋中分布广阔,如何快速、有效地测量海洋浮游生物的时空分布变化,对海洋资源评估、开发、以及可持续发展策略制定都非常关键。
4.海洋浮游生物测量技术中,通过原位非偏振光学成像的方式能够对浮游生物的种类和丰度进行一定程度的统计和研究,现有原位测量仪器如uvp(underwater video profiler)和vpr(video plankton recorder)。但非偏振光学成像技术仅能获得浮游生物体的散射光强、以及成像的边缘特征信息,而且在水下光场测量中存在成像模糊的问题,这些因素造成了海洋浮游生物种类鉴别困难。
5.因此,如何解决现有海洋原位浮游生物成像信息的局限性问题是研究热点。
技术实现要素:
6.针对上述问题,本发明的目的在于提供一种拖曳式浮游生物偏振成像记录仪,以解决现有海洋原位浮游生物成像信息的局限性问题。
7.为实现上述目的,本发明采取的具体技术方案为:一种拖曳式浮游生物偏振成像记录仪,包括拖曳机械体、生境参数测量舱、光源闪频控制单元和远心偏振成像单元,以及与各单元相连起到控制和数据收集、计算作用的系统主控及数据采集单元;其中,所述拖曳机械体内部设置姿态传感和电动式配重平移台;所述生境参数测量舱内部设有传感器,用于采集测量数据;所述光源闪频控制单元包括偏振光源、电源和光耦触发电路,通过获取设置的成像参数来匹配相机和光源的工作模式;所述远心偏振成像单元包括高速相机和远心偏振成像光路。
8.进一步的,所述拖曳机械体采用水滴型流线设计,以降低拖曳时流体阻力。
9.更进一步的,所述姿态传感采用9轴加速传感器,其采集的姿态数据传送至所述系统主控及数据采集单元,该单元计算拖曳机械体前后重心位置后发送给电动式配重平移台,该电动式配重平移台根据重心位置平移配重,以实现拖曳机械体俯仰姿态的调整。
10.进一步的,所述生境参数测量舱内部集成设有温度、盐度和深度传感器,并能够通过通信接口增设ph值、溶解氧和硝酸盐浓度等传感器;在温度和盐度传感探头处设有平口式进水水槽,深度传感探头位于水槽出水口处,形成前端温盐测量、后端深度测量的布局,仪避免拖曳过程中迎流压力造成深度测量误差。
11.进一步的,所述光源闪频控制单元和远心偏振成像单元均采用电压比较式触发工作模式;所述远心偏振成像单元采用全局曝光成像方式。
12.进一步的,所述远心偏振成像单元结合远心成像和孔径分割偏振成像技术,实现
浮游生物运动状态下生物体征的快速偏振成像。
13.更进一步的,所述远心偏振成像光路的物方远心度小于0.1
°
,物方视场宽度大于50 mm,物方景深大于5 mm,像方畸变率小于0.1%,孔径分割光路所测偏振度为0
°
, 45
°
, 90
°
, 135
°
。
14.进一步的,所述系统主控及数据采集单元具体功能包括系统参数的交互设置、浮游生物图像的采集与存储、以及控制拖曳姿态、相机和光源的工作模式等。
15.所述拖曳式浮游生物偏振成像记录仪能够应用于海洋浮游生物调查中。
16.本发明的优点和有益效果:本发明利用远心成像和分振幅偏振测量相结合的原理,同时获取海洋浮游生物体4个偏振度成像,基于生物体4个偏振态下的形状、透明度、纹理及偏振强度等多种信息,从偏振光吸收和散射变化的角度,分析海洋浮游生物的生物体特征。本发明具有浮游生物体多个偏振度同时成像、测量快速、有效的特点,尤其适用于海洋中大面积海域的浮游生物调查应用。
附图说明
17.图1 为本发明的整体框架示图。
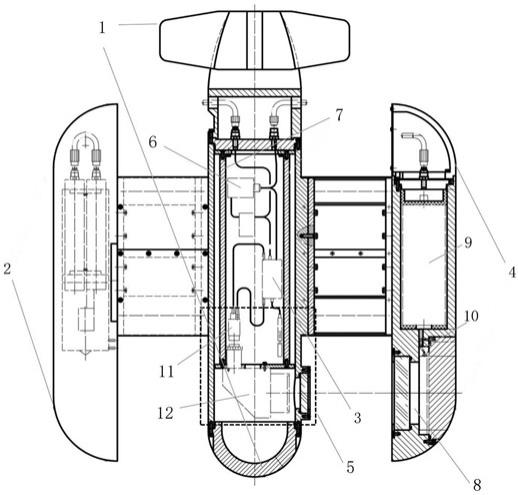
18.图2为本发明的具体结构示意图。
19.图3为实施例2中的识别结果图。
20.图中:1为拖曳机械体、2为生境参数测量舱、3为系统主控及数据采集单元、4为光源闪频控制单元、5为远心偏振成像单元,其中拖曳机械体内部6是姿态传感、7是电动式配重平移台;光源闪频控制单元中,8为偏振光源、9为电源,10为光耦触发电路;远心偏振成像单元中,11为高速相机,12为远心偏振成像光路。
具体实施方式
21.为了使本发明的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本发明进行详细描述。
22.实施例1:如图1和图2 所示,本实施例提供的一种拖曳式浮游生物偏振成像记录仪,包括位于上部的拖曳机械体1、位于两侧的生境参数测量舱2和光源闪频控制单元4、中间设置的系统主控及数据采集单元3、和位于底部的远心偏振成像单元5,所述系统主控及数据采集单元3与各单元相连起到控制和数据收集、计算作用;其中拖曳机械体1内部设置姿态传感6和电动式配重平移台7;生境参数测量舱2内部集成温度、盐度和深度传感器,并能够通过通信接口增设ph值、溶解氧和硝酸盐浓度等传感器;光源闪频控制单元4包括偏振光源8、电源9和光耦触发电路10,通过获取设置的成像参数来匹配相机和光源的工作模式;远心偏振成像单元5包括高速相机11和远心偏振成像光路12。
23.所述拖曳机械体1主体采用水滴型流线设计,降低拖曳时流体阻力。
24.具体的,拖体首部和尾部的曲线方程分别为:首部:
尾部:其中,下标e和r分别表示拖体首部和尾部的参数,是拖体横剖面的最大直径,和分别为进流段和去流段长度(即分别对应拖体首部和尾部位置),和分别是进流段椭圆指数和去流段抛物线指数,和分别为进流段和去流段处距直径处的距离。
25.所述拖曳机械体1内设置的所述姿态传感6采用9轴加速传感器,其采集的姿态数据传送至所述系统主控及数据采集单元3,该单元计算拖曳机械体1前后重心位置后发送给电动式配重平移台7,该电动式配重平移台7根据重心位置平移配重,以实现拖曳机械体1俯仰姿态的调整。
26.生境参数测量舱2中在温度和盐度传感探头处设有平口式进水水槽,深度传感探头位于水槽出水口处,形成前端温盐测量、后端深度测量的布局,避免拖曳过程中迎流压力造成深度测量误差。
27.系统主控及数据采集单元3基于双通道double data rate 4(ddr4)架构,实现系统参数的交互设置、浮游生物图像的采集与存储、以及拖曳姿态、相机和光源的工作模式控制功能。
28.光源闪频控制单元4和远心偏振成像单元5之间,采用电压比较式触发工作模式,远心偏振成像单元5采用全局曝光成像方式。远心偏振成像单元5,包括高速相机11和远心偏振成像光路12,结合远心成像和孔径分割偏振成像技术,实现浮游生物运动状态下生物体征的快速偏振成像。
29.远心偏振成像光路12的物方远心度小于0.1
°
,物方视场宽度大于50mm,物方景深大于5mm,像方畸变率小于0.1%。远心偏振成像光路12的像方,采用分振幅偏振孔径分割技术,孔径分割光路所测偏振度为0
°
, 45
°
, 90
°
, 135
°
。
30.其中,s1,s2,s3和s4为目标物偏振成像的4个stokes分量;i(0
°
),i(45
°
),i(90
°
)和i(135
°
)分别为偏振度为0
°
, 45
°
, 90
°
和135
°
时的成像强度,为成像强度校正常数。
31.实施例2:为了实现观测过程中海洋浮游生物量的自动统计,基于实施例1的拖曳式浮游生物偏振成像记录仪采用的成像记录的方法如下步骤:(1)首先,为了提高偏振图像清晰度、增强成像效果,通过突出感兴趣区域的特征,抑制不感兴趣的特征,扩大图像中不同区域特征之间的差别,以满足海洋浮游生物分析的需要。由于偏振成像方法本身具有提高海洋浮游生物图像对比度的优势,在此基础上,便于采用分段线性灰度增强方法对水下图像进行细节处理。通过扩展感兴趣图像细节的灰度级,压缩不感兴趣图像细节的灰度级,增强图像对比度,能够获得浮游生物清晰的形状轮廓、纹理和结构等信息。
32.(2)然后,在对浮游生物图像灰度化预处理后,采用基于小波变换的阈值图像分割方法,对单幅图像中的生物成像进行边缘检测,即检测灰度级或者结构具有突变的地方,确定一个浮游生物成像区域的边缘。由二进小波变换将图像的直方图分解为不同层次的小波系数,然后依据给定的分割准则和小波系数选择阈值门限,最后利用阈值标出图像分割的区域。整个分割过程是从粗到细,由尺度变化来控制,如果分割不理想,则利用直方图在精细的子空间上的小波系数逐步细化图像分割。分割算法的计算与浮游生物成像尺寸大小呈线性变化。
33.(3)最后,通过浮游生物的形状轮廓、纹理和结构等信息与原始样本库进行匹配分类,实现海洋浮游生物观测过程中生物量的自动统计,图像识别结果如图3所示,能够清楚识别浮游生物。
34.本发明融合远心成像和孔径分割偏振成像技术,通过对海洋浮游生物体偏振成像,同时获得生物体4个偏振态下的形状、透明度、纹理及偏振强度等多种信息,实现不同种类浮游生物体的偏振成像记录,在抑制非偏振光散射成像模糊问题的同时,解决了现有海洋原位浮游生物偏振成像信息不足的问题,来弥补传统浮游生物观测的局限性,从而高效地分析海洋浮游生物的空间分布,有助于对其时空分布及海洋生态环境变化的研究。
35.以上所述的实施例仅用以说明本发明技术方案,而非对其进行方法限制;尽管上述实施例对本发明进行了详述,对于本领域的技术人员来说,依然可以对该实施例所述的技术方案进行修改,或对其中的部分技术特征进行等同性地替换;而这些修改或替换,并不使相应技术方案的本质脱离本发明所要求保护的技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1