一种基于对称区域表面扭曲成分的全极化SAR定标方法
一种基于对称区域表面扭曲成分的全极化sar定标方法
技术领域
1.本发明属于雷达探测领域,具体涉及一种基于对称区域表面扭曲成分的全极化sar定标方法。
背景技术:
2.极化sar是一种有源的微波遥感成像系统,其通过改变发射电磁波的方向以及组合等,具有全天时全天候的微波成像能力,从不同侧面反映被观测地物以及目标的散射特性。随着综合性sar系统的研制以及极化信息的广泛研究与应用,全极化sar相比单极化sar在多角度、多波段等方面具有结合多维信息的能力,在农业、林业、海洋现象、城市规划、地质监测等应用方面展开了广泛以及持续的应用,并得到了丰硕的研究成果。
3.随着极化应用的发展,极化数据各通道之间的相对关系是否正确成为最重要也是最不可忽视的问题。在极化系统运行过程中,系统本身不仅会存在损耗并且受到温度等特性影响,而且在机载sar等系统还会受到外部环境的作用。综合大量研究,上述系统失真主要体现在同极化和交叉极化通道不平衡以及串扰等方面。极化定标主要是利用已知目标的极化特性,通过校正已知目标,求出极化失真参数并将系统校正到可接受水平。现阶段,极化定标主要利用角反射器以及分布式目标进行校正。由于角反射器费时费力并且多频率下要求尺寸不同,为了减少角反射器的使用,现在通常利用分布式目标(多为体散射目标)确定交叉极化通道不平衡以及串扰,同时利用角反射器确定共极化通道不平衡。随着极化定标的发展,现阶段研究聚焦在使用纯分布式目标定标,主要是利用分布式目标确定共极化通道不平衡,进一步去除角反射器的使用。
4.利用分布式目标定标,主要存在两个大问题:一是通过定标模型,确定极化特征与失真参数的等式;二是确定适用极化特征的区域。在共极化通道不平衡的分布式目标定标上,第一个问题主要解决方式为选取裸土区域的无旋性区域、对称性区域、表面扭曲成分为0的区域等;第二个问题通常都认为只要将森林区域与城市区域去除,剩余的农田、沙漠等bragg平面均能满足上述特性,但这样求解较为绝对。
技术实现要素:
5.有鉴于此,本发明的主要目的在于提供一种基于对称区域表面扭曲成分的全极化sar定标方法,能够准确将外定标极化失真参数尽可能准确求解出来。
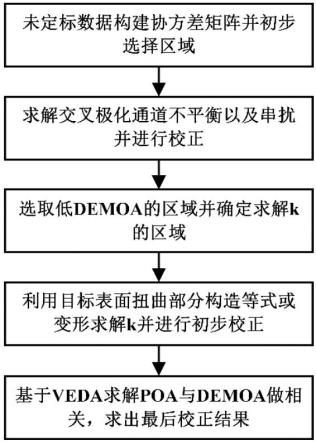
6.为达到上述目的,本发明的技术方案是这样实现的:一种基于对称区域表面扭曲成分的全极化 sar 定标方法,包括如下步骤:步骤 1:基于未定标的全极化 sar 协方差矩阵,选取体散射区域以及表面对称区域并进行分块;步骤 2:基于选取的体散射区域进行交叉极化通道不平衡以及串扰的标定,并对图像进行校正;步骤3:通过方位向以及距离向的坡度百分比求解 demoa,并选取低 demoa 的区
域;其中,demoa为数字高程模型方位角;步骤 4:根据所选表面对称区域以及 demoa 的区域,利用目标表面扭曲部分构造等式或变形式初步确定共极化通道不平衡结果;步骤 5:利用基变换理论准确估计地形的算法求解 poa 与demoa 进行相关,得到去除失真后的共极化通道不平衡值,并对图像完成校正,其中,poa为极化数据反演得到的极化方位角。
7.进一步地,所述步骤 1 包括:首先基于未定标的全极化 sar 协方差矩阵,通过极化参数,选取体散射区域以及表面散射区域,为交叉极化通道不平衡以及串扰和共极化通道不平衡定标做准备;并且简化后续运算,将距离向和方位向进行分块进行后续运算。
8.进一步地,所述步骤 2 包括:利用选取的体散射区域的交叉极化能量较强,信噪比较大,进行交叉极化通道不平衡以及串扰的定标;并依据定标模型,利用求解的定标参数校正 sar 图像。
9.进一步地,所述步骤 3 包括:利用与 sar 图像坐标系一致的数字高程模型数据,求解方位向和距离向坡度百分比并求出 demoa;然后利用阈值选取低 demoa 的区域。
10.进一步地,所述步骤 4 包括:基于选取的低 demoa 的区域中 huynen 参数的目标表面扭曲部分 e 分量为 0 这一极化特性,构造包含共极化通道不平衡的等式,或根据 e 的变形式,即 huynen 参数的目标局部耦合成分 g 进行共极化通道不平衡的定标。
11.进一步地,所述步骤 5 中,利用基变换理论利用准确估计地形的算法求解不同共极化通道不平衡的poa,并与 demoa 做相关,得到最大相关结果下的共极化通道不平衡并对图像完成校正。
12.有益效果:本发明主要利用对称以及demoa为0的裸土huynen参数中目标表面扭曲部分为0或目标局部耦合成分g为0这两个特性进行极化定标。考虑到现在利用角反射器进行定标耗时耗力,所以本发明有益效果之一为舍去角反射器定标,使用纯分布式目标定标使得定标过程准确高效。其次,在未定标图像上直接依据极化参数选取不准确,存在误差。本发明引入外部demoa进行选择,消除部分不确定区域,增加定标精度。
附图说明
13.图1a,图1b为dem坡度示意图;其中,图1a为方位向坡度示意图;图1b为距离向坡度示意图;图2为本发明的基于对称区域表面扭曲成分的全极化sar定标方法流程图;图3a,图3b,图3c,图3d为gf-3数据以及相应的dem数据;其中,图3a为分块的pauli 图像,图3b为前向地理编码后的dem 图,3c为dem 对应的demoa 图,图3d为添加串扰和通道不平衡后的 pauli图;图4a,图4b为利用所提算法求解共极化通道不平衡幅度和相位的结果;其中,图4a为幅度求解结果,图4b为相位求解结果。
具体实施方式
14.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅为本发明的一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域的普通技术人员在不付出创造性劳动的前提下所获得的所有其他实施例,都属于本发明的保护范围。
15.全极化sar系统未定标情况下,利用表面扭曲成分对全极化sar系统进行极化定标具有巨大的重要性。随着全极化sar系统在多场景下迅速地发展与广泛地应用,使用极化定标确定极化系统失真,保证全极化数据正确高效的使用是十分重要的。极化系统失真主要包括同极化与交叉极化系统不平衡以及串扰。现阶段,只使用角反射器进行定标是最准确的定标方式,但是由于角反射器在多场景下不易携带以及不同波段尺寸要求不同,在外场定标实验中较为繁琐,所以现在的研究大部分都使用自然场景中存在的分布式目标进行定标。使用分布式目标定标的准确性一方面体现在使用的算法和定标模型相匹配的程度,另一方面体现在使用算法中利用的分布式目标选取是否准确。使用体散射区域确定同极化以及交叉极化系统不平衡算法已经较为成熟,利用分布式目标确定共极化通道不平衡是现在的研究热点。本发明主要利用在对称区域下,极化方向角(polarization orientation angle,poa)为0的区域表面扭曲成分也为0或目标局部耦合成分为0确定共极化通道不平衡。虽然之前有学者基于表面扭曲成分进行定标,但是选取区域以及使用形式存在问题,使得结果不尽人意。本发明引入数字高程模型(digital elevation model, dem)求出准确dem极化方位角(dem orientation angle,demoa),区域选取不准确的区域,保证准确地确定共极化通道不平衡,进一步得到稳定的极化数据。
16.全极化sar系统未定标情况下,基于整体耦合成分的全极化sar定标流程为:首先基于未定标的全极化sar协方差矩阵,选取体散射区域以及表面对称区域并进行分块;然后基于选取的体散射区域进行交叉极化通道不平衡以及串扰的标定,并对图像进行校正;通过方位向以及距离向的坡度百分比求解demoa,并选取低demoa的区域;根据所选表面对称区域以及demoa的区域,利用目标表面扭曲部分构造等式初步确定共极化通道不平衡结果;通过基变换理论利用准确估计地形的算法(vertical-polarization dominated e=0 deorientation algorithm, veda)求解poa与demoa进行相关,得到去除失真后的共极化通道不平衡值,并对图像完成校正。
17.所述基于整体耦合成分的全极化sar定标方法适用广泛。现如今,对于大多数已知的dem模型,在海域以及水域等自然地物通常会将dem设置为最小值或者是0,导致在利用dem求解poa时存在奇点,在实际精细化定标中,要依据dem数据去除高程为0以下的区域;考虑到存在植被会影响dem的计算,造成误差,所以对于森林等植被茂密的区域可以做多次实验,保证消除误差带来的影响;在利用本发明提出的算法求解共极化通道不平衡k时,主要是利用牛顿迭代法进行求解。对于牛顿迭代法来说,可能存在不收敛的情况,在求解中要进行甄别,去除奇异值带来的影响。
18.基于以上分析,如图2所示,根据本发明的一个实施例,提出一种基于对称区域表面扭曲成分的全极化sar定标方法,该方法包括:步骤1:基于未定标的全极化sar协方差矩阵,选取体散射区域以及表面对称区域并进行分块;
一般地,在极化定标中存在两种极化定标模型,一类以δi(i=1,2,3,4)以及fi(i=1,2)表示,一类以u,v,w,z,α,k表示。其中,δi(i=1,2,3,4)和u,v,w,z均为串扰,fi(i=1,2)和α,k为通道不平衡。由于使用u,v,w,z,α,k能将极化失真以矩阵相乘的形式分隔开,在本发明中将使用该形式,可以表示为:
ꢀꢀꢀꢀꢀ
(1)其中,m为实测数据四极化后向散射矩阵,m
pq
(p,q=h,v)表示为每个极化的测量值;x是串扰失真矩阵,q是交叉极化通道不平衡矩阵,k是同极化通道不平衡矩阵,s是理想的后向散射矩阵。通过式(1)得到极化失真的协方差矩阵为:
ꢀꢀꢀꢀ
(2)其中,为多视处理,做这一步的目的是为了尽可能消除相干斑噪声的影响;上标为共轭转置操作。考虑到极化失真沿入射角存在变化,并且为了计算更加准确,沿sar数据的距离向和方位向进行分块计算。在后续处理中,没有特别说明,将不特别阐述每个数据块的变量名称以及符号,避免引起误解。
19.为了进行分布式目标定标,选取合适区域较为重要。考虑到等效视数可以分辨城区和自然地物,同极化之间的相关性可以分辨森林区域和裸土区域等,本发明利用等效视数以及同极化之间的相关性初步选取对称区域以及森林区域。
20.步骤2:基于选取的体散射区域进行交叉极化通道不平衡以及串扰的标定,并对图像进行校正;将式(2)展开,得到:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)此处主要利用quegan定标法求解交叉极化通道不平衡以及串扰值,即:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
ꢀꢀꢀꢀ
(5)其中,arg(
·
)表示取复数角度,右上标*表示复数共轭。通过式(2),得到去除共极化通道不平衡以及串扰的协方差矩阵为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)需要注意的是,由于去除交叉极化通道不平衡以及串扰后,可以将目标视为满足互易性,所以此处为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)步骤3:通过方位向以及距离向的坡度百分比求解demoa,并选取低demoa的区域;图1a,图1b表示的是坡度示意图,其中x和y分别表示在方位向(图1a)和距离向(图1b)的投影。方位向坡度百分比tanω定义为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)其中,
∆
n1是沿方位向的方位向变化量,通常是以3为步长进行计算;
∆n3a
是沿方位向的dem变化量。同理,距离向坡度百分比tanγr定义为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)其中,
∆
n2是沿距离向的距离向变化量,通常是以3为步长进行计算;
∆n3r
是沿距离向的dem变化量。通过上述求解的方位向和距离向坡度,得到demoa为:
ꢀꢀꢀꢀꢀꢀꢀ
(10)其中,
ϕ
为入射角。根据所选地物的性质符合bragg模型,|s
vv
|2》|s
hh
|2。所以对于地物来说,θ
dem
的基准是以垂直向量为0度,顺时针为负,逆时针为正。通过设置阈值,选取低demoa的区域。并结合上述所选的对称区域,即认为是目标表面扭曲部分为0的区域。
21.步骤4:根据所选表面对称区域以及demoa的区域,利用目标表面扭曲部分构造等式或变形式初步确定共极化通道不平衡结果;由于目标表面扭曲部分为0的区域满足:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)其中,为取实部操作。由于k的存在,使得在所选区域e1不为0。结合通过k影响的整体耦合成分表达式为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)其中,p为k的倒数,o
s12
以及o
s23
分别式(6)中的第一行第二个元素以及第二行第三个元素。容易看出,式(12)存在一个恒解,即p=0。为了去除该解所带来的误差影响,将等式整体除|p|,去除0值所带来的差异,即:
ꢀꢀꢀ
(13)考虑到e1=0对应的实际物理意意义是利用极化得到的poa角度为0,并且其基准轴在poa为0度左右时也是以垂直向量为基准,所以通过上述选取目标得到结果是准确的。对式(13)进行进一步展开,即:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)其中,φ
p
是p的相位。若将式(14)中的余弦函数换成正弦函数,所求得p的相位与式(14)的相位会相差90度,即:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(15)其中,为取虚部,上标*是数字取共轭操作。考虑到g的物理含义为目标局部耦合成分,其为0的区域仍是对称区域的demoa为0的区域,所以也可利用g,即e的变形进行求解。
22.通过牛顿迭代法求解e2/g,求出p,进而求出共极化通道不平衡的备选值。考虑到实际牛顿迭代法可能存在不收敛的问题,将求出的幅度和相位进行滤波,然后进行最小二乘法拟合得到初步结果。
23.步骤5:通过基变换理论利用veda求解poa与demoa进行相关,得到去除失真后的共极化通道不平衡值,并对图像完成校正。
24.将初步得到的共极化通道不平衡k值带入到式(6)中,利用veda求解计算出实际的poa值,消除poa与demoa相位缠绕的问题。并与demoa做相关,得到相关性最大的poa值,所对应的k值即为准确值,所得到的协方差矩阵为最终的协方差矩阵。
25.实施例1
高分三号(gaofen-3,简称gf-3)是我国首颗c波段sar卫星,其具有12种工作模式,涵盖传统的条带成像模式和扫描成像模式,以及面向海洋应用的波成像模式和全球观测成像模式。考虑到利用仿真数据,即对图像添加共极化通道不平衡可以清晰得到算法误差,利于分析,所以本发明利用人工添加通道不平衡以及串扰,对本发明内容进行详尽分析与验证。
26.图3a,图3b,图3c,图3d展示了使用的地距向的gf-3数据以及相应地距向的dem数据。图3a为所选区域的pauli图像,其中选择的区域是中国新疆的沙漠区域。图中的灰白线是考虑到极化失真参数在sar图像中沿入射角变化,并且为了使牛顿迭代法更加准确,对所选sar图像的方位向和距离向进行分块计算。图3b是将外部dem进行前向地理编码转换到sar图像的坐标系上的结果。通过dem与方位向和距离向像素间隔,可以得到demoa图,如图3c所示。由于是通过外部数据直接求解的dem,所以认为是准确的结果。图3d是对sar数据添加串扰以及通道不平衡的结果。可以看出,图像在不同程度上出现了偏差,影响实际的图像识别与应用。
27.图4a,图4b为共极化通道不平衡k定标结果,图4a为k的幅度定标结果,图4b为k的相位定标结果。其中,圆圈代表利用算法估计的结果,通过滤波,将迭代不收敛的点去除,得到图中“*”点。通过对点进行直线拟合,得到点画线,与实线代表的真实值作比较,幅度误差为0.3005db,相位误差为3.4007
°
。可以看出幅度和相位均有较好的拟合效果,相位中另两条线可以通过demoa与poa去除。
28.本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1