一种水深探测的多旋翼飞行平台、探测系统及其探测方法与流程
1.本发明涉及探测飞行平台领域,具体的是一种水深探测的多旋翼飞行平台、探测系统及其探测方法。
背景技术:
2.现有技术中在对水域的深度进行探测时,一般是操作人员操控无人船,通过在无人船船底部安装声波探测器的方式,往河床发射声波,通过计算声波反弹接收的效率以及速度来形成对水深的探测,但是无人船对水域的地势及水流要求较高,并无法灵活的对地势复杂的河床进行深度探测。
3.申请号为201880017203.8的公开了一种用于测量农场水深的无人机,使具有超声波收发器以及红外收发器或微波收发器的无人机(无人飞行器)在农场上空飞行,并根据通过超声波水面反射和微波或红外线地面反射测量的距离的差来测量无人机正下方处的水深;通过使无人机在整个农场上空飞行来精确测量整个农场的水深,但其结构只能测量水深较浅、地势简单、水流很慢的水域,对于地势复杂、水流较快的水域根本无法测量,或测量结果并不准确。
技术实现要素:
4.本发明提供了一种水深探测的多旋翼飞行平台、探测系统及其探测方法,其克服了背景技术中所描述的不足。
5.本发明解决其技术问题的所采用的技术方案是:一种水深探测的多旋翼飞行平台,包括飞行平台本体,所述飞行平台本体包括机舱、机臂、动力系统;所述机舱内设有电源系统;所述机臂环设于机舱的周向表面;所述动力系统包括设于机臂末端的电子调速器、与电子调速器电连接的无刷电机以及与各个无刷电机传动连接的桨叶,所述电子调速器与无刷电机均电连接于电源系统,所述飞行平台本体还包括一探测声呐换能器装置,所述机舱下端通过一刚性连接装置与所述探测声呐换能器装置相连,所述探测声呐换能器装置具有一换能器,所述换能器设于探测声呐换能器装置的下端,并且在探测水深时,所述探测声呐换能器装置没入水中;还包括起降支架,所述起降支架底部设有用于容纳刚性连接装置及探测声呐换能器装置的中空部,所述飞行平台为多旋翼无人机,通过操控无人机,将探测声呐换能器装置没入水中进行测水深,测量结果精准。
6.进一步改进的是,所述刚性连接装置包括设于机舱下方的连接板以及连接管,所述连接板通过多个所述弹性件与机舱下端面相连,所述连接板表面开设有螺纹孔,所述连接管的一端螺纹孔相连,而另一端与探测声呐换能器装置相连,所述连接板为铝合金板,通过弹性件的设置,可以减少飞行平台在起飞降落过程中的振动,延长飞行平台的使用寿命,通过连接管和连接板的可拆卸连接,方便飞行平台的运输,铝合金质量轻,可减少飞行平台的荷载。
7.进一步改进的是,所述弹性件为不等节距圆柱弹簧,不等节距圆柱弹簧。
8.进一步改进的是,所述连接管为空心管状体的玻纤管或碳纤管,所述探测声呐换能器装置通过一连接线与机舱相电连,所述探测声呐换能器装置的连接线贯穿过连接管,空心管状体的玻纤管或碳纤管的质量轻,韧性好,既减小了飞行平台的荷载,又避免了因水流太大折断连接管的风险。
9.进一步改进的是,所述探测声呐换能器装置还包括套设于换能器外侧的船形减阻器。
10.进一步改进的是,所述船形减阻器中部呈圆弧状,两侧呈尖形状,中部与两侧一体成型,减阻器采用类似船的形状,可以减小水中阻力,防止由于水流过大冲断连接管。
11.一种水深探测的探测系统,包括以下模块:探测模块,所述探测模块即为所述的探测声呐换能器装置;gnss系统模块,所述gnss定位系统模块设于所述的机舱内;地面站系统,所述地面站系统包括用于操控多旋翼飞行平台的遥控设备以及设于遥控设备上的用于显示接收飞行平台数据的显示屏;控制模块,所述控制模块设于所述机舱内,探测声呐换能器装置通过贯穿于连接管的连接线连接于控制模块,所述控制模块与地面站系统相互通信连接,所述控制模块与gnss系统模块相互连接,所述控制模块用于定位数据与探测声呐换能器装置反馈的数据的运算,并将运算所得数据传输至地面站系统;飞行控制系统,所述飞行控制系统用于控制飞行平台的飞行,所述飞行控制系统与地面站系统通信连接。
12.一种基于水深探测的飞行平台及探测系统的探测方法,包括以下探测步骤:s1:所述地面站系统操控飞行平台从起降支架上起飞,飞至待测水域的上空;s2:所述控制飞行平台将探测模块没入水中悬停,所述探测声呐换能器装置测得数据后将数据反馈至控制模块;s3:所述控制模块根据gnss系统模块得到的定位数据与探测声呐换能器装置反馈的数据,做运算得到水底点的坐标、高程及深度;s4:所述控制模块将最终计算数据发送至地面站系统,所述地面站系统确认数据后操控飞行平台按照预设定轨迹飞至下一个测量点;s5:所有测量点都测量完毕后,所述地面站系统操控飞行平台飞回起降支架上。
13.本技术方案与背景技术相比,它具有如下优点:可通过本发明提供的飞行平台、飞行系统及其探测方法,可精确地探测水深,而且不受水域的流速和地势影响,打破传统无人船测水深的弊端,能产生巨大的社会效益,应该在市场上广泛地推广使用。
附图说明
14.下面结合附图和实施例对本发明作进一步说明。
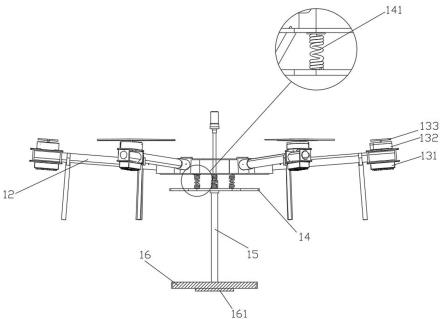
15.图1为本发明的整体结构示意图;图2为飞行平台本体的正视图。
16.图中:机舱11、机臂12、动力系统13、电子调速器131、无刷电机132、桨叶133、连接
板14、连接管15、探测声呐换能器装置16、换能器161、起降支架2。
具体实施方式
17.如图1-2所示,一种用于探测水深的飞行平台,包括飞行平台本体,所述飞行平台本体包括机舱11、机臂12、动力系统13;所述机舱11内设有电源系统;所述机臂12环设于机舱11的周向表面;所述动力系统13包括设于机臂12末端的电子调速器131、与电子调速器131电连接的无刷电机132以及与各个无刷电机132传动连接的桨叶133,所述电子调速器131与无刷电机132均电连接于电源系统,所述飞行平台本体还包括一探测声呐换能器装置16,所述机舱11下端通过一刚性连接装置与所述探测声呐换能器装置16相连,所述探测声呐换能器装置16具有一换能器161,所述换能器161设于探测声呐换能器装置16的下端,并且在探测水深时所述探测声呐换能器装置16没入水中,有必要解释的是,由于通过动力系统13带动飞行平台本体进行飞行属于本领域技术的公知常识,而在此并不对其作进一步赘述;当本发明在使用时,通过控制飞行平台飞行至需要探测水深的水域上空时,通过声呐换能器装置16的声呐光电转换的原理来对水深进行计算与探测,结合gnss差分数据,可得到水底点的坐标、高程,而在此需要解释的是,本技术方案中探测声呐换能器装置16可选用现有技术中具有释放、接收声波的距离探测器或具有相同功能的设备即可。
18.而本实施例中,所述刚性连接装置包括设于机舱11下方的连接板14以及连接管15,所述连接板14通过多个所述弹性件与机舱11下端面相连,所述连接板14表面开设有螺纹孔,所述连接管15的一端螺纹孔相连,而另一端与探测声呐换能器装置16相连,当驾驶飞行平台本体飞行时,便可通过连接管15延长机舱11与水面的距离,并且通过连接管15对探测声呐换能器装置16进行连接,从而避免机舱11过于贴近水面出现水溅入机舱11内的风险,而所述弹性件为141,而所述141以连接板14的中心点环状阵列,因此可采用弹性件或141来连接连接板14,并且所述141为不等节距圆柱弹簧,可通过将141设置为不等节距圆柱弹簧,避免当连接板14摆动的幅度过大时,而造成行平台本体1的姿态失衡;并且,连接管15可采用玻纤管或碳纤管,减少重量但依然保持相应的强度,减少飞行平台本体在飞行时的重量负担。
19.并且,所述连接管15为空心管状体,所述探测声呐换能器装置16通过连接线与机舱11相连,所述探测声呐换能器装置16的连接线贯穿过连接管15,而所述探测声呐换能器装置16还包括套设于换能器161外侧的船形减阻器,所述船形减阻器中部呈圆弧状,两侧呈尖形状,中部与两侧一体成型,减阻器采用类似船的形状,可以减小水中阻力,防止由于水流过大冲断连接管15;并且由于机舱11下侧通过连接管15连接探测声呐换能器装置16,而为了避免在静置时探测声呐换能器装置16撞击地面,可在飞行平台本体的下侧架设起降支架2,而起降支架2内为中空状,起降支架2的深度深于机臂12至船形减阻器之间的距离,在使用时,可通过控制器控制飞行平台本体飞行至起降支架2内,所述起降支架2纵截面呈梯形状。
20.还提供一种水深探测的探测系统,包括以下模块:探测模块,所述探测模块即所述的探测声呐换能器装置16;gnss系统模块,所述gnss定位系统模块设于所述的机舱11内;
地面站系统,所述地面站系统包括用于操控水深探测的多旋翼飞行平台的遥控设备以及设于遥控设备上的用于显示接收飞行平台数据的显示屏;控制模块,所述控制模块设于所述的机舱11内;探测声呐换能器装置16通过贯穿于连接管15的连接线连接于控制模块,所述控制模块与地面站系统相互通信连接,所述控制模块与gnss系统模块相互连接,所述控制模块用于定位数据与探测声呐换能器装置16反馈的数据的运算,并将运算所得数据传输至地面站系统;飞行控制系统,所述飞行控制系统用于控制所述的飞行平台飞行,所述飞行控制系统与地面站系统通信连接。
21.还提供一种水深探测的多旋翼飞行平台及探测系统的探测方法,包括以下探测步骤:s1:所述地面站系统操控飞行平台从起降支架2上起飞,飞至待测水域的上空;s2:所述控制飞行平台将探测模块没入水中并悬停,所述探测声呐换能器装置16测得数据后将数据反馈至控制模块;s3:所述控制模块根据gnss系统模块得到的定位数据与探测声呐换能器装置16反馈的数据,做运算得到水底点的坐标、高程及深度;s4:所述控制模块将最终计算数据发送至地面站系统,所述地面站系统确认数据后操控飞行平台按照预设定轨迹飞至下一个测量点;s5:所有测量点都测量完毕后,所述地面站系统操控飞行平台飞回起降支架2上。
22.以上所述,仅为本发明较佳实施例而已,故不能依此限定本发明实 施的范围,即依本发明专利范围及说明书内容所作的等效变化与修饰,皆应仍属本发明涵盖的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1