弱反射光纤光栅阵列微弱振动强度与位置解调系统及方法
1.本发明涉及一种光纤传感系统技术领域。具体涉及一种弱反射光纤光栅阵列微弱振动强度与位置同时解调系统及及其解调方法。
背景技术:
2.光纤振动传感技术可以探测地震声波、异物入侵、油气管道泄露、建筑桥梁振动等,为人类安全预警活动提供了重要的技术支撑。弱反射光纤光栅阵列,由拉丝塔在线拉丝和激光单脉冲曝光制备而成,已经在人类生产生活中得到广泛应用【黄俊斌,丁朋,唐劲松.弱反射光纤光栅阵列制备、解调与应用进展[j].激光与光电子学进展,2021,58(17):1700005.】。
[0003]
弱反射光纤光栅阵列时域解调技术一般采用mach-zenhder干涉仪、michelson干涉仪或光纤延迟线匹配弱反射光纤光栅阵列形成干涉效应,实现弱反射光纤光栅阵列干涉相位信号的解调,该类方法可以获取相邻弱反射光纤光栅之间的传感光纤相位变化,得出外界扰动强度信息,但无法获取传感光纤的振动位置。为此,将输入光源分为两路,额外一路采用传统分布式光纤检测振动位置的方法解决弱反射光纤光栅阵列无法获取振动位置的问题【zhang x p,sun z h,shan y y,et al.a high performance distributed optical fiber sensor based onφ-otdr for dynamic strain measurement[j].ieee photocics journal,2017,9(3):6802412.】;采用空分复用的方法,检测完弱反射光纤光栅阵列相位变化,再切换光脉冲检测弱反射光纤光栅阵列振动位置【tong y h,li z y,wang j q,et al.high-speed mach-zehnder-otdr distributed optical fiber vibration sensor using medium-coherence laser[j].photonic sensors,2018,8(3):203-212.】,这两种方法本质上都是把振动强度和位置两个物理量分开测量,而将振动强度解调光路和振动位置光路机械叠加而成。但上述的两种方法会导致信号光强减弱,信噪比较低,测量时间上的不连续,无法获取高频振动信号强度和位置。
技术实现要素:
[0004]
本发明提供了一种弱反射光纤光栅阵列微弱振动强度与位置解调系统及方法,以解决振动强度和位置需要分开检测,不能同时检测,无法检测更加微弱的振动信号的问题。
[0005]
本发明公开了一种弱反射光纤光栅阵列微弱振动强度与位置解调系统,包括:脉冲信号产生模块、两个相同的解调模块、弱反射光纤光栅阵列;
[0006]
脉冲信号产生模块分别与两个解调模块连接;弱反射光纤光栅阵列的两端分别与两个解调模块连接。
[0007]
进一步地,所述脉冲信号产生模块包括:第一任意信号发生器、连续激光器、第一声光调制器、光纤放大器、1
×
2耦合器;
[0008]
连续激光器的输出端与第一声光调制器的信号输入端连接;第一任意信号发生器与第一声光调制器的调制信号输入端连接;第一声光调制器的输出端与光纤放大器的输入
端连接;光纤放大器的输出端与1
×
2耦合器的输入端连接;1
×
2耦合器的两个输出端分别与两个调制模块连接。
[0009]
进一步地,所述第一声光调制器的脉冲宽度需要小于2nl/c,其中,n为光纤的有效折射率,c为真空中的光速,l为弱反射光纤光栅阵列的栅距;
[0010]
第一声光调制器的脉冲周期需要大于(n-1)l,其中,n为弱反射光纤光栅阵列中光栅的个数,l为弱反射光纤光栅阵列的栅距。
[0011]
进一步地,所述解调模块包括:第一环形器、第二环形器、第二声光调制器、第二任意信号发生器、光纤延迟线、三个光电探测器、迈克尔逊干涉仪、零差对称解调器;
[0012]
脉冲信号产生模块与第一环形器的1脚连接;第一环形器的2脚与第二声光调制器的信号输入端连接;第二任意信号发生器与第二声光调制器的调制信号输入端连接;第二声光调制器的输出端与光纤延迟线的一端连接;光纤延迟线的另一端与弱反射光纤光栅阵列连接;第一环形器的3脚与第二环形器的1脚连接;第二环形器的2脚与迈克尔逊干涉仪的输入端连接;第二环形器的3脚与一个光电探测器连接;迈克尔逊干涉仪的两个输出端分别与两个光电探测器连接;三个光电探测器与零差对称解调器连接。
[0013]
进一步地,所述迈克尔逊干涉仪的臂差与弱反射光纤光栅阵列的栅距相同。
[0014]
进一步地,所述第二声光调制器在一个周期的[l1+2l0+(n-1)l]n/c至[l1+2l0+(n-1)l]n/c+τ的时间内断光,一个周期的其他时间都通光,其中,n为光纤的有效折射率,c为真空中的光速,l为弱反射光纤光栅阵列的栅距,n为弱反射光纤光栅阵列中光栅的个数,l0为光纤延迟线的长度,l1为耦合器与第二声光调制器之间的连线长度。
[0015]
本发明还提供了一种弱反射光纤光栅阵列微弱振动强度与位置解调系统的解调方法,包括:
[0016]
当探测的干涉区间发生偏移时,通过零差对称解调算法分别获取两个解调模块中光电探测器收到的光强信号的干涉相位信号,计算两个干涉相位信号的平均值获得振动的强度信息;从两个解调模块中分别选择任一一个光电探测器,将两个光电探测器获取的干涉光强进行互相关运算得到振动点的位置信息。
[0017]
本发明具有以下有益效果:
[0018]
本发明采用解调模块中的声光调制器控制光脉冲通断,让有用的弱反射光纤光栅阵列反射光脉冲通过,而无用的光源透射弱反射光纤光栅阵列的光脉冲无法通过,以保护光电探测器;
[0019]
本发明采用2个michelson干涉仪匹配弱反射光纤光栅阵列形成干涉效应,以2个干涉仪的干涉相位信号的平均值作为振动强度信号,可以比单个michelson干涉解调系统测量精度可翻倍,可测量更低强度的微弱信号;
[0020]
本发明在获取振动强度信号的同时,分别选取2个解调模块中任1个干涉光强信号,进行互相关运算,即可获取振动信号的位置信息,该方法可以运算简单,并且可以实时获取位置信息。
附图说明
[0021]
通过参考附图会更加清楚的理解本发明的特征和优点,附图是示意性的而不应理解为对本发明进行任何限制,在附图中:
[0022]
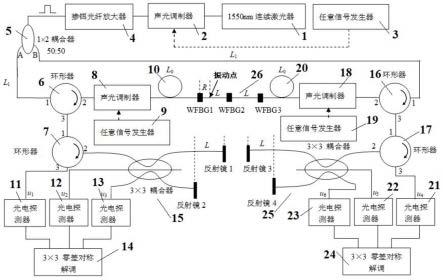
图1为本发明具体实施例的系统图;
[0023]
图2为本发明具体实施例中探测器1-3接收的光强时域图。
具体实施方式
[0024]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例;基于本发明中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0025]
本发明公开了一种弱反射光纤光栅阵列微弱振动强度与位置解调系统,如图1所示:脉冲信号产生模块包括1550nm波长的连续激光器1连接声光调制器2(由任意信号发生器3脉冲信号驱动),依次连接掺铒光纤放大器4、分光比为50:50的1
×
2耦合器5,两个相同的解调模块其中左侧的解调模块包括:环形器6、环形器7、声光调制器8、任意信号发生器9、光纤延迟线10、三个光电探测器11-13、迈克尔逊干涉仪15、零差对称解调器14;右侧的解调模块包括:环形器16、环形器17、声光调制器18、任意信号发生器19、光纤延迟线20、三个光电探测器21-23、迈克尔逊(michelson)干涉仪25、零差对称解调器24;
[0026]1×
2耦合器5的a输出端口连接环形器6的1端口,环形器6的2端口连接声光调制器8(由任意信号发生器9信号驱动),声光调制器8连接线长为l0的光纤延迟线10后,再与栅距为l的弱反射光纤光栅阵列26一端相连,环形器6的3端口与环形器7的1端口相连,环形器7的2端口与臂差为l的michelson干涉仪25相连,环形器7的3端口以及michelson干涉仪25的2个输出端口各连接1个光电探测器,依次记为光电探测器11-13,光电探测器11-13连接3
×
3零差对称解调器14。1
×
2耦合器的b输出端口后续光路与a端口的后续光路相同。系统中声光调制器1的脉冲宽度需要小于2nl/c,n为光纤的有效折射率,c为真空中的光速,如此相邻弱反射光纤光栅反射的光脉冲不会发生重叠,声光调制器1的脉冲周期需要大于(n-1)l,如此相邻周期脉冲在弱反射光纤光栅阵列中反射的光脉冲不会发生重叠。声光调制器8和声光调制器18在一个周期的[l1+2l0+(n-1)l]n/c至[l1+2l0+(n-1)l]n/c+τ的时间内断光,一个周期的其他时间都通光,以保证从弱反射光纤光栅阵列前端反射的光脉冲都能够通过,从弱反射光纤光栅阵列后端透射进阵列的光脉冲都无法通过,以保护光电探测器11-13和光电探测器21-23。
[0027]
假定弱反射光纤光栅阵列中弱反射光纤光栅阵列26的wfbg1和wfbg2之间有一个振动点,该振动点距离wfbg1的长度为r,则距wfbg2的长度为l-r。光电探测器11-13接收的光强时域图如图2所示,其中声光调制器2的脉冲宽度t1t0《2nl/c。wfbg1反射的光脉冲经过臂差为l的michelson干涉仪15的长短臂在时域图上出现2个光脉冲,它们相距t2t0=2nl/c,同理wfbg2时域图上也出现2个相同的光脉冲。由于弱反射光纤光栅阵列26的栅距为l,则wfbg2时域图中的前一个光脉冲距wfbg1时域图中的前一个光脉冲的时长为t2t0=2nl/c,那么wfbg1的后一个脉冲与wfbg2的前一个光脉冲重叠,发生干涉。由此可以通过零差对称解调算法对光电探测器11-13接收到的光强信号计算出振动的干涉相位信号,具体计算方法可以通过【丁朋,吴晶,康德,等.采用弱反射光纤布拉格光栅的声波方向检测[j].中国激光,2020,47(5):0506002】获知,并且光电探测器11-13接收到振动点干涉光强的时间为t1=[l1+2(r+l0)]n/c,同理可以通过零差对称解调算法对光电探测器21-23接收到的光强信
号计算出振动的干涉相位信号,并且光电探测器21-23接收到振动点干涉光强的时间为t2=[l1+2(l-r+l0)+2(n-2)l]n/c。最终通过计算两个干涉相位信号的平均值获得振动的强度信息;可以选取光电探测器11-13中的任一个干涉光强与光电探测器21-23中的任一个干涉光强进行互相关运算,即可得出振动点的位置信息,具体计算方法可以通过【刘波,杨亦飞,张键,等.基于m-z干涉的光纤围栏系统实验研究[j].光子学报,2007,36(6):1013-1017】获知。
[0028]
虽然结合附图描述了本发明的实施例,但是本领域技术人员可以在不脱离本发明的精神和范围的情况下作出各种修改和变型,这样的修改和变型均落入由所附权利要求所限定的范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1