一种用于光掩膜基版的平面度检测方法及系统与流程
1.本发明涉及半导体检测领域,具体涉及一种用于光掩膜基版的平面度检测方法及系统。
背景技术:
2.光掩膜基版是一种硬面光掩膜材料,即光掩膜基版,它是当前及未来微细加工光掩膜制作的主流感光材料(相当于照相用的感光胶卷)。它是在平整的、高光洁度的玻璃基版上通过直流磁控溅射(sp)沉积上氮化铬-氮氧化铬薄膜而形成铬膜基版,再在其上涂敷一层光致抗蚀剂(又称光刻胶)或电子束抗蚀剂制成匀胶铬版。
3.由于掩膜版属于精密零件,因此在光掩膜基版生产出来后,都需要对光掩膜基版的表面平整度进行检查。在对光掩膜基版进行检测时,通常采用干涉法和三远点法对平面度进行检测。而干涉法即根据光的干涉原理在光掩膜基版上形成干涉条纹,通过分析干涉条纹来判断平面度。
4.然而,现有技术中存在对光掩膜基版进行检测的过程中,由于场地环境的亮度不同或者光掩膜基版的尺寸参数的不同,难以采集到清晰的干涉条纹,导致当摄像机拍摄出的干涉条纹不清晰或者不完整时,无法对光掩膜基版的平面度进行精准判断的技术问题。
技术实现要素:
5.本技术提供了一种用于光掩膜基版的平面度检测方法及系统,用于针对解决现有技术中对光掩膜基版进行检测的过程中,由于场地环境的亮度不同或者光掩膜基版的尺寸参数的不同,难以采集到清晰的干涉条纹,导致当摄像机拍摄出的干涉条纹不清晰或者不完整时,无法对光掩膜基版的平面度进行精准判断的技术问题。
6.鉴于上述问题,本技术提供了一种用于光掩膜基版的平面度检测方法及系统。
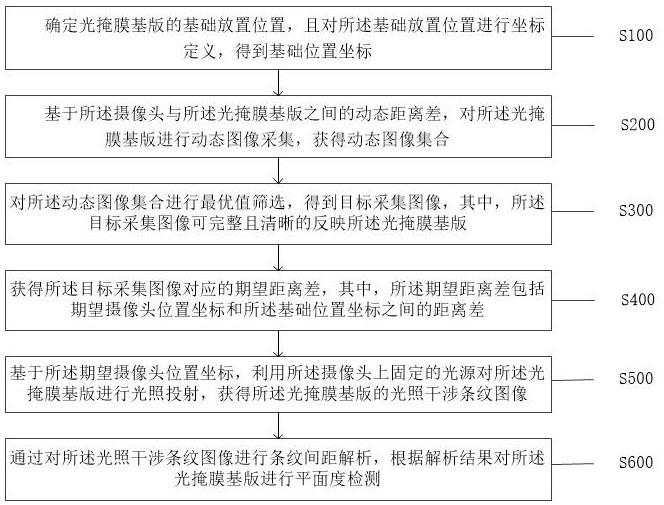
7.本技术的第一个方面,提供了一种用于光掩膜基版的平面度检测方法,所述方法应用于平面度检测系统,且所述平面度检测系统与摄像头通信连接,所述方法包括:确定光掩膜基版的基础放置位置,且对所述基础放置位置进行坐标定义,得到基础位置坐标;基于所述摄像头与所述光掩膜基版之间的动态距离差,对所述光掩膜基版进行动态图像采集,获得动态图像集合;对所述动态图像集合进行最优值筛选,得到目标采集图像,其中,所述目标采集图像可完整且清晰的反映所述光掩膜基版;获得所述目标采集图像对应的期望距离差,其中,所述期望距离差包括期望摄像头位置坐标和所述基础位置坐标之间的距离差;基于所述期望摄像头位置坐标,利用所述摄像头上固定的光源对所述光掩膜基版进行光照投射,获得所述光掩膜基版的光照干涉条纹图像;通过对所述光照干涉条纹图像进行条纹间距解析,根据解析结果对所述光掩膜基版进行平面度检测。
8.本技术的第二个方面,提供了一种用于光掩膜基版的平面度检测系统,所述系统包括:基础位置确定模块,用于确定光掩膜基版的基础放置位置,且对所述基础放置位置进行坐标定义,得到基础位置坐标;图像采集模块,用于基于所述摄像头与所述光掩膜基版之
间的动态距离差,对所述光掩膜基版进行动态图像采集,获得动态图像集合;图像筛选模块,用于对所述动态图像集合进行最优值筛选,得到目标采集图像,其中,所述目标采集图像可完整且清晰的反映所述光掩膜基版;摄像坐标获取模块,用于获得所述目标采集图像对应的期望距离差,其中,所述期望距离差包括期望摄像头位置坐标和所述基础位置坐标之间的距离差;光照投射模块,用于基于所述期望摄像头位置坐标,利用所述摄像头上固定的光源对所述光掩膜基版进行光照投射,获得所述光掩膜基版的光照干涉条纹图像;条纹间距解析模块,用于通过对所述光照干涉条纹图像进行条纹间距解析,根据解析结果对所述光掩膜基版进行平面度检测。
9.本技术中提供的一个或多个技术方案,至少具有如下技术效果或优点:本技术实施例提供的方法通过对摄像头和光掩膜基版之间的空间距离进行不断调整,使得采集到较为完整且清晰的光掩膜基版图像,同时基于该采集图像对应的摄像头位置,利用摄像头上固定的光源对光掩膜基版进行光照投射,从而对光掩膜基版的光照干涉条纹图像进行间距解析,使得根据间距解析结果对光掩膜基版进行平面度检测。达到了基于较为清晰的干涉条纹,对光掩膜基版进行平面度的精准检测的技术效果。
附图说明
10.图1为本技术提供的一种用于光掩膜基版的平面度检测方法流程示意图;图2为本技术提供的一种用于光掩膜基版的平面度检测方法中对所述动态图像集合进行最优值筛选的流程示意图;图3为本技术提供的一种用于光掩膜基版的平面度检测方法中判断所述干涉条纹间距分布是否满足标准等间距分布的流程示意图;图4为本技术提供的一种用于光掩膜基版的平面度检测系统的结构示意图。
具体实施方式
11.本技术提供了一种用于光掩膜基版的平面度检测方法及系统,用于针对解决现有技术中对光掩膜基版进行检测的过程中,由于场地环境的亮度不同或者光掩膜基版的尺寸参数的不同,难以采集到清晰的干涉条纹,导致当摄像机拍摄出的干涉条纹不清晰或者不完整时,无法对光掩膜基版的平面度进行精准判断的技术问题。
12.针对上述技术问题,本技术提供的技术方案总体思路如下:对摄像头和光掩膜基版之间的空间距离进行不断调整,使得采集到较为完整且清晰的光掩膜基版图像,同时基于该采集图像对应的摄像头位置,利用摄像头上固定的光源对光掩膜基版进行光照投射,从而对光掩膜基版的光照干涉条纹图像进行间距解析,使得根据间距解析结果对光掩膜基版进行平面度检测。达到了基于较为清晰的干涉条纹,对光掩膜基版进行平面度的精准检测的技术效果。
13.实施例一如图1所示,本技术提供了一种用于光掩膜基版的平面度检测方法,所述方法包括:步骤s100:确定光掩膜基版的基础放置位置,且对所述基础放置位置进行坐标定义,得到基础位置坐标;
步骤s200:基于所述摄像头与所述光掩膜基版之间的动态距离差,对所述光掩膜基版进行动态图像采集,获得动态图像集合;具体而言,本身请提供的一种用于光掩膜基版的平面度检测方法,可有效解决现有技术中存在的问题,从而对光掩膜基版进行平面度的精准检测。其中,所述基础放置位置,一般的,可将待检测的光掩膜基版放置于玻璃放置台上,确保摄像头对其进行完整的图像采集,所述基础位置坐标为一个原始的具有基准点的坐标参考,使得后续的摄像头调整坐标都是基于该基准坐标进行定义的。
14.进而,可通过对摄像头和光掩膜基版之间的空间距离进行不断调整,使得采集到较为完整且清晰的光掩膜基版图像,其中,所述动态图像集合,为相对于上述的基准点坐标,根据动态可调整的摄像头坐标,利用加固的摄像头对光掩膜基版进行不断图像采集的过程,进而集合而成的各个采集图像结果。
15.步骤s300:对所述动态图像集合进行最优值筛选,得到目标采集图像,其中,所述目标采集图像可完整且清晰的反映所述光掩膜基版;步骤s400:获得所述目标采集图像对应的期望距离差,其中,所述期望距离差包括期望摄像头位置坐标和所述基础位置坐标之间的距离差;进一步的,如图2所示,步骤s300包括:步骤s310:通过对所述动态图像集合中,各基版图像轮廓边缘进行提取,等得到各基版图像轮廓边缘集合;步骤s320:对所述各基版图像轮廓边缘集合与对应的各动态图像边缘集合,进行一一对应的边缘差计算,得到两两边缘差集合;步骤s330:通过对所述两两边缘差集合进行极小值筛选,可获得对应的所述目标采集图像;步骤s340:基于所述期望摄像头位置坐标,将光源信息作为定量参数,对所述摄像头的相机参数进行动态调整,且将动态相机参数作为变量参数;步骤s350:获得所述变量参数对应的多相机采集图像;步骤s360:对所述多相机采集图像进行像素值采集,可得到各图像像素值分布;步骤s370:通过对所述各图像像素值分布进行最大值筛选,可获得目标图像像素对应的目标相机参数;步骤s380:利用所述目标相机参数,对所述目标采集图像进行像素值优化。
16.具体而言,在获得上述各个采集图像结果之后,需要对其进行最优值筛选,便于获得对应的采集坐标进行光照投射。具体的,在进行最优质筛选时,可对各采集图像中光掩膜基版的轮廓覆盖度进行检索,一般的,可筛选采集图像要完全覆盖光掩膜基版的轮廓,且要求采集图像的留白区域面积最小,因此,可通过对所述动态图像集合中,各基版图像轮廓边缘进行提取,等得到各基版图像轮廓边缘集合,所述各基版图像轮廓边缘集合,反映了光掩膜基版的轮廓边缘集合。
17.进而,对所述各基版图像轮廓边缘集合与对应的各动态图像边缘集合,进行一一对应的边缘差计算,得到两两边缘差集合,其中,所述两两边缘差集合反映了任一采集图像边缘与其上覆盖的光掩膜基版的轮廓边缘之间的差值,一般的,差值越小,越说明光掩膜基版的轮廓边缘最大覆盖图像边缘,使得对应的光掩膜基版采集图像像素越高。则所述目标
采集图像,即光掩膜基版的轮廓边缘最大覆盖图像边缘时对应的采集图像。
18.除此之外,为了确保所述目标采集图像的高精度,可基于所述期望摄像头位置坐标,将光源信息作为定量参数,对所述摄像头的相机参数进行动态调整,且将动态相机参数作为变量参数。其中,所述期望摄像头位置坐标,可理解为基于所述基础位置坐标,所述期望距离差相对应的摄像头的位置坐标,可基于所述摄像头位置坐标,完整且较为清晰的对光掩膜基版进行光照干涉条纹采集,同时,所述期望距离差,可理解为当光掩膜基版的轮廓边缘最大覆盖图像边缘时对应的摄像头与光掩膜基版之间的距离差。通过将光源信息作为定量参数即将各类光照参数设置为标准定量,将动态相机参数作为变量参数,通过不断调整摄像头的各项拍照参数,可获得所述变量参数对应的多相机采集图像,所述多相机采集图像,即反映了在同一光照不同相机参数下的采集图像集合。
19.通过对上述多相机采集图像进行像素值解析,可得到各图像像素值分布,其中,像素值反映了图像的清晰度大小,一般的,像素值越大,图像越清晰,通过对所述各图像像素值分布进行最大值筛选,可获得目标图像像素对应的目标相机参数,其中,所述目标图像像素即为筛选获得的最大值像素,所述目标相机参数即为该像素对应的拍照参数,可基于所述目标相机参数,对所述目标采集图像进行像素值优化。确保在满足光掩膜基版的轮廓边缘最大覆盖的基础上,使的对应的像素值最大,图像最为清晰。
20.步骤s500:基于所述期望摄像头位置坐标,利用所述摄像头上固定的光源对所述光掩膜基版进行光照投射,获得所述光掩膜基版的光照干涉条纹图像;步骤s600:通过对所述光照干涉条纹图像进行条纹间距解析,根据解析结果对所述光掩膜基版进行平面度检测。
21.进一步的,步骤s600包括:步骤s610:通过对所述光照干涉条纹图像进行图像解析,可获得干涉条纹间距分布;步骤s620:判断所述干涉条纹间距分布是否满足标准等间距分布;步骤s630:若所述干涉条纹间距分布满足所述标准等间距分布,输出所述光掩膜基版的标准检测结果,其中,所述标准检测结果包括所述光掩膜基版具有光滑平面。
22.其中,如图3所示,步骤s620包括:步骤s621:若所述干涉条纹间距分布不满足所述标准等间距分布,采集干涉条纹中的亮纹偏向信息;步骤s622:基于缺陷检测逻辑,对所述亮纹偏向信息进行逻辑判断;步骤s623:根据所述亮纹偏向信息,若亮纹偏向左侧,则输出所述光掩膜基版的第一缺陷检测结果,其中,所述第一缺陷检测结果包括所述光掩膜基版具有凹陷平面;步骤s624:根据所述亮纹偏向信息,若所述亮纹偏向右侧,则输出所述光掩膜基版的第二缺陷检测结果,其中,所述第二缺陷检测结果包括所述光掩膜基版具有凸起平面。
23.具体而言,在获得最佳摄像头位置,即所述期望摄像头位置坐标之后,进一步的,可利用所述摄像头上固定的光源对所述光掩膜基版进行光照投射,获得所述光掩膜基版的光照干涉条纹图像。即利用光的干涉现象对物体表面进行高精度的平整度检测。由于光掩膜基版是在平整的、高光洁度的玻璃基版上通过直流磁控溅射(sp)沉积上氮化铬-氮氧化铬薄膜而形成铬膜基版,再在其上涂敷一层光致抗蚀剂(又称光刻胶)或电子束抗蚀剂制成
匀胶铬版。因此,可通过氮化铬-氮氧化铬薄膜对光的干涉进行表面平整度的判定。当光照射到薄膜上,被膜的前、后表面反射的两列光形成相干光,如果劈形薄膜厚度均匀变化时,干涉条纹是与劈棱平行的明暗相间的直条纹,相邻条纹间距相等;反之,如果相邻条纹间距不等,则说明基版表面的薄膜厚度不存在均匀变化。其中,所述光照干涉条纹图像,即反映了当光照射到基版表面时,基版表面薄膜对光的实际干涉条纹分布,可基于此进行平整度判定。
24.具体的,可通过对所述光照干涉条纹图像进行图像解析,可获得干涉条纹间距分布,所述干涉条纹间距分布实际反应了各明暗条纹之间的间距分布,可判断所述干涉条纹间距分布是否满足标准等间距分布,如果满足标准等间距分布,则输出光掩膜基版的标准检测结果,其中,所述标准检测结果包括所述光掩膜基版具有光滑平面,即说明该光掩膜基版的表面均匀光滑,不存在凹凸等缺陷。
25.反之,如果所述干涉条纹间距分布不满足所述标准等间距分布,则说明该光掩膜基版的表面存在缺陷,可进一步的采集干涉条纹中的亮纹偏向信息,通过亮纹的偏向可进一步判定光掩膜基版的表面具体缺陷。其中,所述缺陷检测逻辑,为对干涉条纹中的亮纹偏向进行判定的逻辑。具体的,根据所述亮纹偏向信息,若亮纹偏向左侧,则输出所述光掩膜基版的第一缺陷检测结果为所述光掩膜基版具有凹陷平面;反之,若所述亮纹偏向右侧,则输出所述光掩膜基版的第二缺陷检测结果为所述光掩膜基版具有凸起平面。综上,通过对干涉条纹间距进行判断,可实现对光掩膜基版的表面平整度进行精准检测。只有当干涉条纹间距等间距时,才能说明该光掩膜基版的表面平整,否则存在凹陷或凸起的表面缺陷。
26.本实施例提供的方法通过确定光掩膜基版的基础放置位置,且对所述基础放置位置进行坐标定义,得到基础位置坐标;基于所述摄像头与所述光掩膜基版之间的动态距离差,对所述光掩膜基版进行动态图像采集,获得动态图像集合;对所述动态图像集合进行最优值筛选,得到目标采集图像,其中,所述目标采集图像可完整且清晰的反映所述光掩膜基版;获得所述目标采集图像对应的期望距离差,其中,所述期望距离差包括期望摄像头位置坐标和所述基础位置坐标之间的距离差;基于所述期望摄像头位置坐标,利用所述摄像头上固定的光源对所述光掩膜基版进行光照投射,获得所述光掩膜基版的光照干涉条纹图像;通过对所述光照干涉条纹图像进行条纹间距解析,根据解析结果对所述光掩膜基版进行平面度检测。解决现有技术中对光掩膜基版进行检测的过程中,由于场地环境的亮度不同或者光掩膜基版的尺寸参数的不同,难以采集到清晰的干涉条纹,导致当摄像机拍摄出的干涉条纹不清晰或者不完整时,无法对光掩膜基版的平面度进行精准判断的技术问题。
27.实施例二基于与前述实施例中一种用于光掩膜基版的平面度检测方法相同的发明构思,如图4所示,本技术提供了一种用于光掩膜基版的平面度检测系统,其中,所述系统包括:基础位置确定模块,用于确定光掩膜基版的基础放置位置,且对所述基础放置位置进行坐标定义,得到基础位置坐标;图像采集模块,用于基于所述摄像头与所述光掩膜基版之间的动态距离差,对所述光掩膜基版进行动态图像采集,获得动态图像集合;图像筛选模块,用于对所述动态图像集合进行最优值筛选,得到目标采集图像,其中,所述目标采集图像可完整且清晰的反映所述光掩膜基版;
摄像坐标获取模块,用于获得所述目标采集图像对应的期望距离差,其中,所述期望距离差包括期望摄像头位置坐标和所述基础位置坐标之间的距离差;光照投射模块,用于基于所述期望摄像头位置坐标,利用所述摄像头上固定的光源对所述光掩膜基版进行光照投射,获得所述光掩膜基版的光照干涉条纹图像;条纹间距解析模块,用于通过对所述光照干涉条纹图像进行条纹间距解析,根据解析结果对所述光掩膜基版进行平面度检测。
28.进一步的,所述系统包括:边缘提取单元,用于通过对所述动态图像集合中,各基版图像轮廓边缘进行提取,等得到各基版图像轮廓边缘集合;边缘差计算单元,用于对所述各基版图像轮廓边缘集合与对应的各动态图像边缘集合,进行一一对应的边缘差计算,得到两两边缘差集合;极小值筛选单元,用于通过对所述两两边缘差集合进行极小值筛选,可获得对应的所述目标采集图像。
29.进一步的,所述系统包括:参数标定单元,用于基于所述期望摄像头位置坐标,将光源信息作为定量参数,对所述摄像头的相机参数进行动态调整,且将动态相机参数作为变量参数;采集图像获取单元,用于获得所述变量参数对应的多相机采集图像;像素采集单元,用于对所述多相机采集图像进行像素值采集,可得到各图像像素值分布;最大值筛选单元,用于通过对所述各图像像素值分布进行最大值筛选,可获得目标图像像素对应的目标相机参数;像素值优化单元,用于利用所述目标相机参数,对所述目标采集图像进行像素值优化。
30.进一步的,所述系统包括:图像解析单元,用于通过对所述光照干涉条纹图像进行图像解析,可获得干涉条纹间距分布;间距判定单元,用于判断所述干涉条纹间距分布是否满足标准等间距分布;标准结果输出单元,用于若所述干涉条纹间距分布满足所述标准等间距分布,输出所述光掩膜基版的标准检测结果,其中,所述标准检测结果包括所述光掩膜基版具有光滑平面。
31.进一步的,所述系统包括:亮纹偏向采集单元,用于若所述干涉条纹间距分布不满足所述标准等间距分布,采集干涉条纹中的亮纹偏向信息;逻辑判断单元,用于基于缺陷检测逻辑,对所述亮纹偏向信息进行逻辑判断。
32.进一步的,所述系统包括:凹陷平面输出单元,用于根据所述亮纹偏向信息,若亮纹偏向左侧,则输出所述光掩膜基版的第一缺陷检测结果,其中,所述第一缺陷检测结果包括所述光掩膜基版具有凹陷平面;凸起平面输出单元,用于根据所述亮纹偏向信息,若所述亮纹偏向右侧,则输出所
述光掩膜基版的第二缺陷检测结果,其中,所述第二缺陷检测结果包括所述光掩膜基版具有凸起平面。
33.综上所述的任意一项方法或者步骤可作为计算机指令或程序存储在各种不限类型的计算机存储器中,通过各种不限类型的计算机处理器识别计算机指令或程序,进而实现上述任一项方法或者步骤。
34.基于本发明的上述具体实施例,本技术领域的技术人员在不脱离本发明原理的前提下,对本发明所作的任何改进和修饰,皆应落入本发明的专利保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1