激光雷达测试系统、测试工站及测试方法与流程
本说明书实施例涉及雷达检测,尤其涉及一种激光雷达测试系统、测试工站及测试方法。
背景技术:
1、激光雷达(radar)作为一种主动探测环境感知传感器,在可靠度、探测范围、测距精度等方面具有不可比拟的优势,已成为汽车自动驾驶、无人驾驶、定位导航、空间测绘、安保安防等领域最为核心的传感器设备。其工作原理是向目标发射探测信号(激光脉冲),探测信号在目标处发生漫反射后形成回波信号,激光雷达通过接收反射回来的光束形成点云数据,根据点云数据以及发射和接收激光光束的时间间隔(飞行时间,time of flight,tof)可以获得目标的有关信息,如目标距离、方位、高度、速度、姿态、甚至形状等参数,从而对车辆、行人等目标进行探测、跟踪和识别。
2、作为一台复杂的精密光电探测设备,激光雷达的部分关键性能参数指标和标定、校准数据,如最远/最近测量距离、测距精度、反射率精度、重复精度、点云质量、飞行时间校准值、反射率标定值等,需要在激光雷达在完成装配后,对每台设备进行详细的测试检查,当确认激光雷达各项性能参数达到预设标准时,激光雷达才能正式投入使用。
3、传统的测试方法中,通常是将激光雷达固定放置,然后通过人工手动多次移动或者更换目标物体,以及调整激光雷达角度,来分别对激光雷达多个通道的各项性能进行一一测试,且需要人工统计处理数据、手动向雷达写入标定和校准数据,测试不够全面,且测试流程繁杂,整个测试过程耗时长,效率低下;并且通过手动移动目标物体的定位偏差较大,测试结果准确性低。传统测试方法占用较大的人工和时间成本,是激光雷达量产的一大短板。为适应激光雷达量产的技术发展需求,提升产品测试效率,需要设计全新的、效率更高、精度更高的测试系统和测试方法。
4、背景技术部分的内容仅仅是公开人所知晓的技术,并不当然代表本领域的现有技术。
技术实现思路
1、有鉴于此,针对现有测试方法效率不高、测试精度低、测试不全面等技术问题,本技术提出了一种激光雷达测试系统、测试工站及测试方法,通过设置多个布置分散的平面结构,且平面结构上可以设置一个或多个不同反射率的区域,能够使激光雷达在一次扫描过程中即可完成对应通道的多项性能测试,整个测试过程无需手动调整激光雷达以及移动平面结构,也无需手动写入和处理数据,能够提高测试效率和测试精度,快速完成对雷达的全面测试。
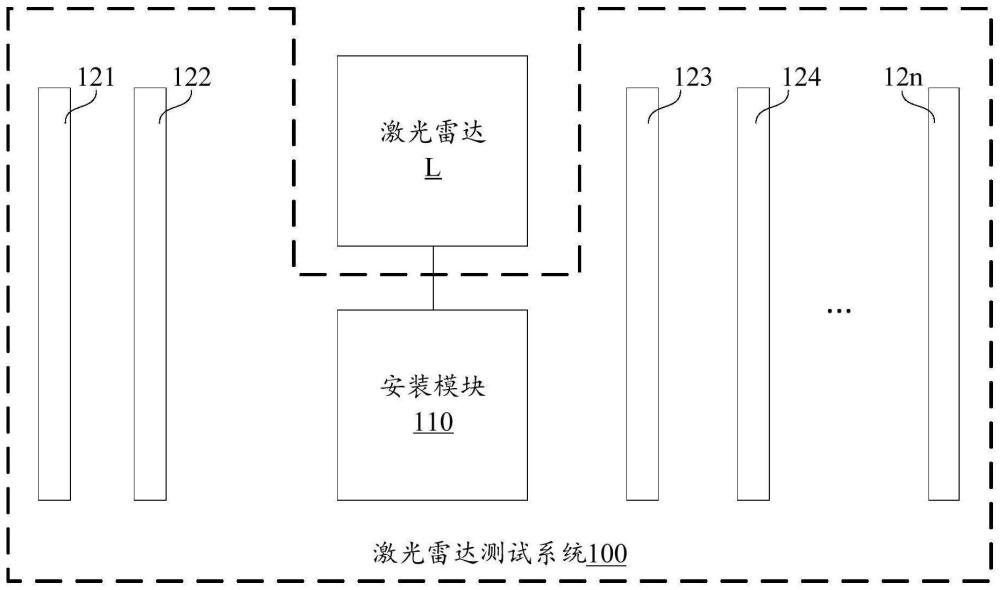
2、首先,本说明书实施例提供了一种激光雷达测试系统,包括:安装模块和多个分散布置的平面结构,其中:
3、所述安装模块,适于安装待测激光雷达;
4、所述多个平面结构中任一平面结构上设置有一个或者多个具有不同反射率的区域,用于反射探测信号至所述激光雷达,以对所述激光雷达进行性能测试,且所述平面结构的分散布置使激光雷达测试系统快速测试所述激光雷达在设计距离内的探测效果。
5、可选地,至少一个所述平面结构上的具有第一反射率的区域能够等效具有第二反射率的目标物体,所述第一反射率小于所述第二反射率;所述具有第一反射率的区域和所述激光雷达之间的距离为第一距离,所述具有第二反射率的目标物体和所述激光雷达之间的距离为第二距离,所述第一距离大于所述第二距离。
6、可选地,所述多个平面结构相对于所述激光雷达的视场角至少部分不重叠。
7、可选地,所述多个平面结构相对于所述待测激光雷达的水平视场角和/或垂直视场角至少部分不重叠。
8、可选地,所述多个平面结构中设置于所述安装模块的同一侧的平面结构的竖直高度与所述平面结构和所述激光雷达之间的距离正相关。
9、可选地,所述多个平面结构相对于所述激光雷达的水平视场张角和/或垂直视场张角相同。
10、可选地,所述多个平面结构中至少一个所述平面结构上设置具有不同反射率的多个区域。
11、可选地,所述具有不同反射率的多个区域相对于所述激光雷达的视场张角相同。
12、可选地,所述平面结构上的至少一个区域的反射率与其他所述平面结构上的至少一个区域的反射率不同或者相同。
13、可选地,所述激光雷达测试系统还包括:至少一个竖直移动模块,与所述多个平面结构中的至少一个平面结构相适配,适于调整所适配的平面结构与所述待测激光雷达的相对位姿。
14、可选地,所述激光雷达测试系统还包括:位姿调整模块,与所述激光雷达固定连接,适于调节所述激光雷达的位姿,使所述激光雷达发射的多束探测光分别基本垂直入射至所述平面结构。
15、可选地,所述的激光雷达测试系统还包括:可移动测试工装,在与所述激光雷达的连线方向上可自由移动。
16、可选地,所述激光雷达测试系统还包括:位移控制模块,与所述可移动测试工装连接,适于控制所述可移动测试工装沿所述可移动测试工装与所述激光雷达的连线方向上移动。
17、可选地,所述激光雷达测试系统还包括:水平零角度标定工装,用于标定所述激光雷达的水平零角度。
18、可选地,所述水平零角度标定工装包括:
19、第一板状结构;
20、第二板状结构;
21、凹槽结构,设置于所述第一板状结构和所述第二板状结构之间,且所述凹槽结构包含反射率大于所述第一板状结构反射率和第二板状结构反射率的区域。
22、可选地,所述激光雷达测试系统还包括:点云质量测试工装,用于测试所述激光雷达的点云质量。
23、可选地,所述点云质量测试工装包括:
24、第三板状结构;
25、第四板状结构,与所述第三板状结构垂直连接,且所述第四板状结构朝向所述激光雷达端面的反射率大于所述第三板状结构的反射率。
26、可选地,所述激光雷达测试系统还包括:光源模块,设置于所述平面结构处,适于模拟环境光。
27、可选地,所述激光雷达测试系统还包括:控制模块,用于自动记录、处理和存储测试数据,以及向所述激光雷达写入数据。
28、相应地,本说明书实施例还提供一种激光雷达测试工站,包括前述任一实施例所述的激光雷达测试系统和容置区,其中:
29、所述激光雷达测试系统,适于测试激光雷达的性能;
30、所述容置区,适于容纳所述激光雷达测试系统。
31、可选地,所述容置区的形状及区域大小适于根据所处地理环境设置;
32、所述激光雷达测试系统,适于基于所述容置区的形状及区域大小适应布置。
33、本说明书实施例还提供一种激光雷达测试方法,适于采用前述任一实施例所述的激光雷达测试系统进行测试,所述测试方法包括:
34、对所述待测激光雷达进行性能测试。
35、可选地,性能测试类型包括水平零角度标定、飞行时间校准、测距、反射率标定、反射率复测、点云质量测试、鬼像测试中的一项或多项。
36、采用本说明书实施例提供的激光雷达测试系统中,由于多个平面结构中任一平面结构上均设置有一个或者多个具有不同反射率的区域,因此,可以根据不同平面结构反射的回波信号,对激光雷达进行快速的性能测试;同时多个平面结构的分散布置,使得多个平面结构与激光雷达的距离不同,从而能够根据所述分散布置的平面结构具有不同反射率的区域或者具有相同反射率的区域反射至激光雷达的回波信号,使得激光雷达在一次扫描测试中即可完成对应通道的完整测试,极大缩短了测试用时,,而且分散布置的各平面结构与激光雷达之间的位置关系是预先设置好的,在测试过程中无须人工移动或者更换平面结构,节省了移动或者更换平面结构所需要的时间,测试所需时间短,且能够保证平面结构位置数据的准确性,因此,能够提高测试效率和测试精度。
37、进一步地,由于多个平面结构中至少一个所述平面结构上具有第一反射率的区域能够等效具有第二反射率的目标物体,其中,所述第一反射率小于所述第二反射率,且所述具有第一反射率的区域与激光雷达间的第一距离小于所述具有第二反射率的区域与所述激光雷达间的第二距离。通过这种等效方式,可以在空间有限的测试场地中,采用距离激光雷达较近的第一距离的平面结构等效实际运行环境中距离激光雷达较远的第二距离的目标物体,从而无须将待测激光雷达和平面结构放置在实际面积较大的测试空间中,大大缩小了测试场地的尺寸,解决了激光雷达为完成测远性能测试而要求较大测试场地的技术问题,减小对测试空间需求。
38、进一步地,在所述激光雷达测试系统中,通过使得多个平面结构相对于所述待测激光雷达的视场角至少部分不重叠,一方面,能够避免多个平面结构测试区域相互遮挡,使得在激光雷达一次扫描测试过程中,激光雷达发射的探测光束可以入射到多个平面结构的测试区域,进而能够同时获取多个平面结构反射的回波信号,从而能够降低测试时间,提高测试效率,实现快速测试;另一方面,能够实现多个平面结构占用较小测试场地,避免测试场地尺寸过大导致的成本提升。
39、进一步地,对于设置在安装模块同一侧的平面结构,通过将平面结构的竖直高度设置为与所述测试平面和所述安装模块的距离正相关,能够使得位于雷达同一侧的各平面结构间存在高度差,避免距离激光雷达较近的平面结构遮挡距离激光雷达较远的其他平面结构,使得各平面结构的测试区域均能被激光雷达探测到,能够一次性得到更多平面结构反射的探测信号,从而进一步提高测试效率。
40、进一步地,通过使多个平面结构相对于激光雷达的水平视场张角和/或垂直视场张角相同,能够使得每个平面结构表面接收到的光斑数和探测通道序号是一样的,这样激光雷达在一次扫描过程中,能够以相同的通道数目入射至各平面结构上,进而可以得到激光雷达不同距离处的多个平面结构反射的相同通道的回波信号,完成对应通道的完整测试,从而能够节省测试时间和降低数据处理的复杂度,提高测试效率。
41、进一步地,由于平面结构中至少一个区域的反射率与其他平面结构上的至少一个区域的反射率不同或者相同,因此,在一次探测过程中,通过检测并比较不同平面结构不同反射率区域反射至激光雷达的探测信号或者同一平面结构不同区域反射至激光雷达的回波信号,能够对激光雷达的同一性能多次复测,进而能够提高结果的精度。
42、进一步地,所述激光雷达测试系统还包括至少一个竖直移动模块,通过在竖直方向上移动所述竖直移动模块,能够调整与所述竖直移动模块相适配的平面结构的竖直高度,使其让出雷达视场,使雷达能够进一步利用该平面结构后方的其他平面结构进行测试,无需手动移动,提高测试效率和精度。
43、进一步地,所述激光雷达测试系统还包括位姿调整模块,通过所述位姿调整模块,能够调节所述激光雷达的位姿,使得所述激光雷达的不同探测通道能够依次基本垂直入射至所述平面结构;并且对于具有较大垂直视场的激光雷达而言,所述位姿调整模块能够在平面结构相对于所述激光雷达的垂直视场角较小时,通过控制激光雷达俯仰运动,使得激光雷达不同探测通道发出的光均能够入射至平面结构,从而无须设置竖直尺寸较大的平面结构。
44、进一步地,所述激光雷达测试系统还包括光源模块,通过所述光源模块能够为平面结构提供模拟环境光,使得激光雷达测试系统能够模拟真实的运行场景,提高测试精度。
45、进一步地,所述激光雷达测试系统中设置多种用于不同性能的测试或标定装置,从而在一次扫描测试过程中,同时对激光雷达的多项性能进行测试,减少测试所述时间,提高测试效率。
46、进一步地,所述激光雷达测试系统还包括控制模块,通过所述控制模块,能够自动记录、处理和存储测试数据,以及向所述激光雷达写入数据,实现一键式测试,从而能够降低人工操作强度,避免出现人为操作误差,提升测试效率和精度。
- 还没有人留言评论。精彩留言会获得点赞!