一种快速重建深度相机、系统及汽车的制作方法
本发明涉及深度测量,具体地,涉及一种快速重建深度相机、系统及汽车。
背景技术:
1、深度测量技术可以获得目标对象的深度数据,从而可以获得rgbd等带有深度信息的3d图像。相比于2d图像,3d图像包含更多的数据,可以实现对目标的更好识别,并且由于技术的发展,目前已经在人脸识别、3d建模、vr等领域获得应用。相比于其他深度测量技术,tof测量技术的范围更广,并且精度具有较好的一致性,因此广泛应用于测量范围较广的场景中。
2、tof技术根据数据的获取原理又区分为itof和dtof技术。itof是通过发射一定波形的激光信号,通过计算接收信号与发射信号的相位差,间接计算得到深度数据。而dtof技术是通过接收接收信号与发射信号的时间差,直接计算得到深度数据。由于光速非常快,对发射与接收装置的精度要求非常高,因此dtof主要用于较远距离的测量,而itof技术则主要用于中等距离的测量。在封闭空间中,主要的应用技术均为itof技术。
3、双目技术是利用两幅图像的视差,计算获得深度值。双目技术在中等距离和较近距离的精度较高,但是对于颜色较一致等情况下无法获得准确的数据,同时也存在着计算量大的问题。
4、在封闭空间,如驾驶舱等,主流计算芯片为定点dsp芯片,而itof计算中主要依赖于浮点数的运算,因此导致目前的算法无法直接应用于定点dsp芯片。
技术实现思路
1、为此,本发明采用标准公式进行计算,无需过多地分类,可以起到快速计算的作用,从而可以使得本发明在具有并行计算能力的芯片上的运行速度大幅提升,充分利用芯片的计算能力,提高数据获取速度,缩短响应时间。
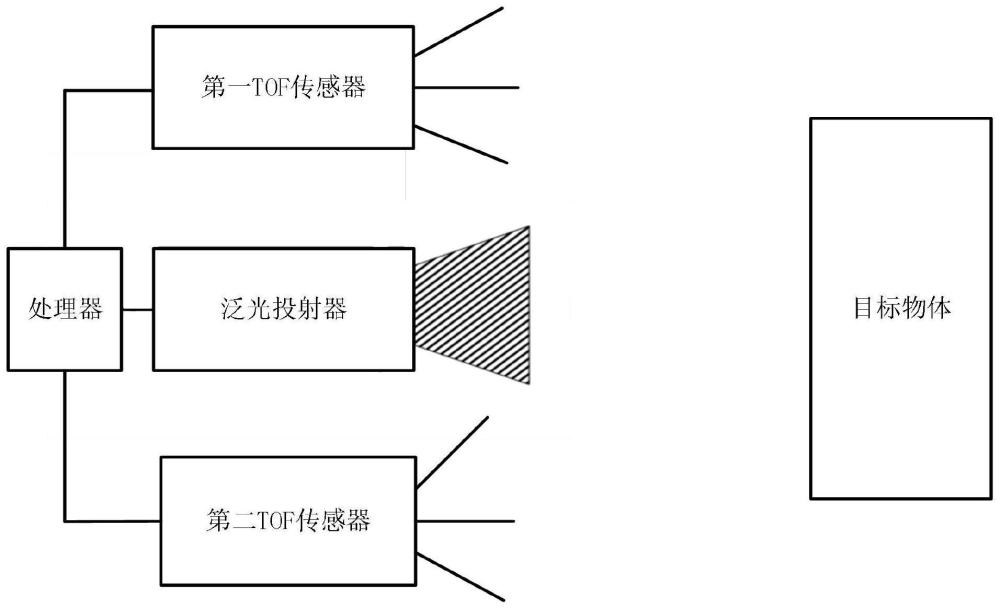
2、第一方面,本发明提供一种快速重建深度相机,其特征在于,包括:
3、泛光投射器,用于周期性向目标对象投射红外泛光;
4、第一tof传感器,用于接收所述目标对象的反射信号,得到第一解调信号;
5、第二tof传感器,用于接收所述目标对象的反射信号,得到第二解调信号;
6、处理器,用于控制所述泛光投射器在预设时间投射,并在深度图的第一区域中,采用标准公式计算发射信号与反射信号的相位差,得到深度值;在深度图的第二区域中,根据所述第一解调信号和所述第二解调信号的视差计算得到深度值;其中,所述标准公式中采用绝对值进行计算。
7、可选地,所述的一种快速重建深度相机,其特征在于,处理器在计算深度值时,包括如下步骤:
8、步骤s1:获得泛光的发射信号、所述第一解调信号和所述第二解调信号的数据;其中,一个所述发射信号至少对应两个所述解调信号;
9、步骤s2:在深度图的第一区域中,同时对多个像素点采用标准公式计算所述发射信号和所述第一解调信号之间的相位偏置;其中,所述标准公式中采用绝对值进行计算;
10、步骤s3:根据所述相位偏置计算得到所述像素的深度值;
11、步骤s4:在深度图的第二区域中,根据所述第一解调信号和所述第二解调信号的视差计算像素的深度值;
12、步骤s5:将所述第一区域的深度值和所述第二区域的深度值合并,得到所述深度图的深度值。
13、可选地,所述的一种快速重建深度相机,其特征在于,在步骤s2中进行计算时,将计算数据乘以2的n次幂,并转化为整数,再进行整数运算;并在运算完成后除以2的n次幂,转化为浮点数。
14、可选地,所述的一种快速重建深度相机,其特征在于,根据计算能力将多个像素分为小组,并按顺序对小组进行处理。
15、可选地,所述的一种快速重建深度相机,其特征在于,步骤s2包括:
16、步骤s21:对发射的所述发射信号按顺序进行标记;
17、步骤s22:对接收的所述解调信号按顺序进行标记;
18、步骤s23:根据所述解调信号的波形识别出卷绕部分;
19、步骤s24:根据所述发射信号与所述解调信号的顺序对所述卷绕部分进行恢复,得到恢复解调信号;
20、步骤s25:根据所述恢复解调信号和所述发射信号计算相对偏置。
21、可选地,所述的一种快速重建深度相机,其特征在于,将图像区域划分为若干个子区域,并对其中至少一个所述子区域设置标志点,用于判断所述子区域是否有卷绕部分。
22、第二方面,本发明提供一种itof快速深度重建系统,其特征在于,包括:
23、至少两个快速重建深度相机,所述快速重建深度相机是前述任一项所述的快速重建深度相机;
24、控制器,用于控制所述至少两个快速重建深度相机在不同时间投射。
25、可选地,所述的一种itof快速深度重建系统,其特征在于,所述控制器控制所述至少两个快速重建深度相机在第一工作模式和第二工作模式切换;
26、在所述第一工作模式中,所述至少两个快速重建深度相机中的至少两个所述泛光投射器交替投射;
27、在所述第二工作模式中,所述至少两个快速重建深度相机中的仅有一个所述泛光投射器投射。
28、可选地,所述的一种itof快速深度重建系统,其特征在于,所述至少两个快速重建深度相机在共同的识别区域中,为不同的快速重建深度相机获得的深度数据赋予不同的权重,经过换算得到最终的深度值。
29、第三方面,本发明提供一种汽车,其特征在于,安装有前述任意一项所述快速重建深度相机。
30、与现有技术相比,本发明具有如下的有益效果:
31、本发明利用标准公式对相位偏置进行计算,无需判断分支,可以更好地进行并行计算,提高计算速度,降低了响应时间。
32、本发明通过对计算公式的改进,使得计算只需利用绝对值进行,将需要分类计算的四种情形转换为一种标准情形,简化了计算逻辑,提升了计算效率。
33、本发明同时对计算公式的改进,使得芯片可以同时对多个像素点进行处理,从而使得芯片的并行计算能力得到最大化利用,提高芯片的处理效率与处理能力,缩短itof数据的计算时间,提高了效率。
34、本发明将tof技术与双目技术结合,结合tof技术的优势与双目技术的优势,使得整个计算过程快速而准确。通过预先感知的可能发生卷绕的第二区域,直接采用双目进行计算,而可能不发生卷绕的第一区域,采用tof技术进行计算,大大减少了后期的计算量,提高了效率。
技术特征:
1.一种快速重建深度相机,其特征在于,包括:
2.根据权利要求1所述的一种快速重建深度相机,其特征在于,处理器在计算深度值时,包括如下步骤:
3.根据权利要求2所述的一种快速重建深度相机,其特征在于,在步骤s2中进行计算时,将计算数据乘以2的n次幂,并转化为整数,再进行整数运算;并在运算完成后除以2的n次幂,转化为浮点数。
4.根据权利要求2所述的一种快速重建深度相机,其特征在于,根据计算能力将多个像素分为小组,并按顺序对小组进行处理。
5.根据权利要求2所述的一种快速重建深度相机,其特征在于,步骤s2包括:
6.根据权利要求5所述的一种快速重建深度相机,其特征在于,将图像区域划分为若干个子区域,并对其中至少一个所述子区域设置标志点,用于判断所述子区域是否有卷绕部分。
7.一种itof快速深度重建系统,其特征在于,包括:
8.根据权利要求7所述的一种itof快速深度重建系统,其特征在于,所述控制器控制所述至少两个快速重建深度相机在第一工作模式和第二工作模式切换;
9.根据权利要求7所述的一种itof快速深度重建系统,其特征在于,所述至少两个快速重建深度相机在共同的识别区域中,为不同的快速重建深度相机获得的深度数据赋予不同的权重,经过换算得到最终的深度值。
10.一种汽车,其特征在于,安装有权利要求1至6中任意一项所述快速重建深度相机。
技术总结
一种快速重建深度相机,包括:泛光投射器,用于周期性向目标对象投射红外泛光;第一TOF传感器,用于接收所述目标对象的反射信号,得到第一解调信号;第二TOF传感器,用于接收所述目标对象的反射信号,得到第二解调信号;处理器,用于控制所述泛光投射器在预设时间投射,并在深度图的第一区域中,采用标准公式计算发射信号与反射信号的相位差,得到深度值;在深度图的第二区域中,根据所述第一解调信号和所述第二解调信号的视差计算得到深度值。本发明采用标准公式进行计算,无需过多地分类,从而可以使得本发明在具有并行计算能力的芯片上的运行速度大幅提升,并且将iTOF技术与双目技术的优势结合,提高数据获取速度,缩短响应时间。
技术研发人员:刘东东,汪博,朱力,吕方璐
受保护的技术使用者:深圳市光鉴科技有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!